![[机器人仿真]WEBOTS中创建轮腿机器人模型-并联闭环机构的创建和使用](/uploads/2024/09/30/1727658902096025301.webp)
想着做个轮腿的机器人玩玩,但是如果光用PID做算法,对于轮子加腿的结构似乎效果并不好,为了实现轮腿本身能够飞坡在一定高度下能够跳跃,我想着上个仿真模型来调试和学习LQR算法机器人仿真的软件似乎挺多,我查到比较常用的有ROS套件的一个,还有就是webots本...
本文是ROS联合Webots仿真实战教程,不包含ROS环境安装配置教程,ROS环境安装配置教程可以参考。_webotsros...
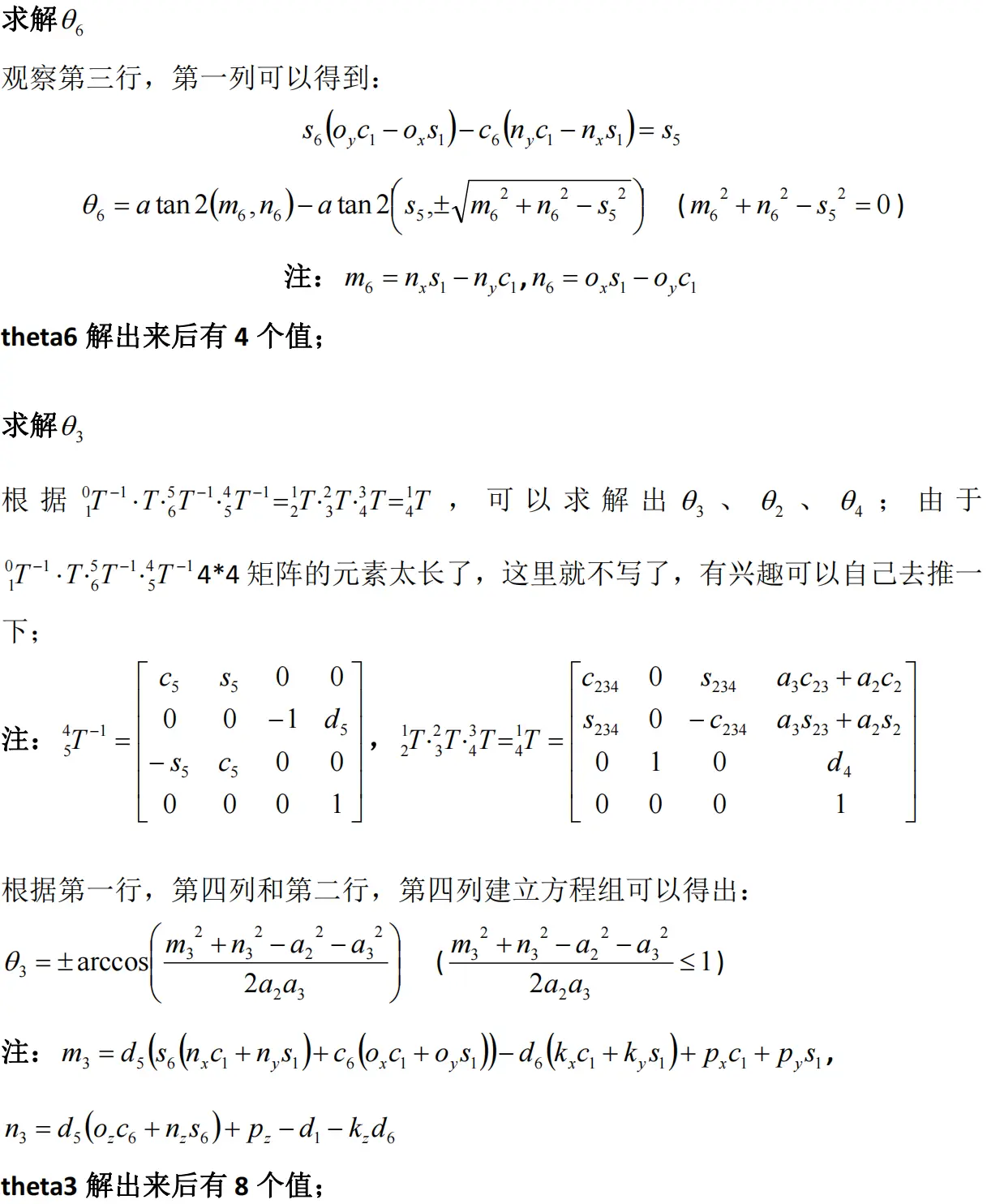
本文详细介绍了UR型和PUMA型六轴机械臂的运动学分析,包括准型DH参数下坐标系建立、运动学正逆解方法、轨迹规划策略,以及如何处理逆解问题和提供Python和C源码示例,还涉及Webots仿真环境的应用。...
以下是基于webots2023b版本。_2023webots创建控制器...

ISAAC是NVIDIA推出的专为机器人打造的系统,旨在推动自主机器的发展。它通过提供高性能的仿真环境,帮助加速机器人应用程序的开发和部署。ISAAC集成了NVIDIA的图形和物理模拟技术,以及AI和机器学习算法,为...
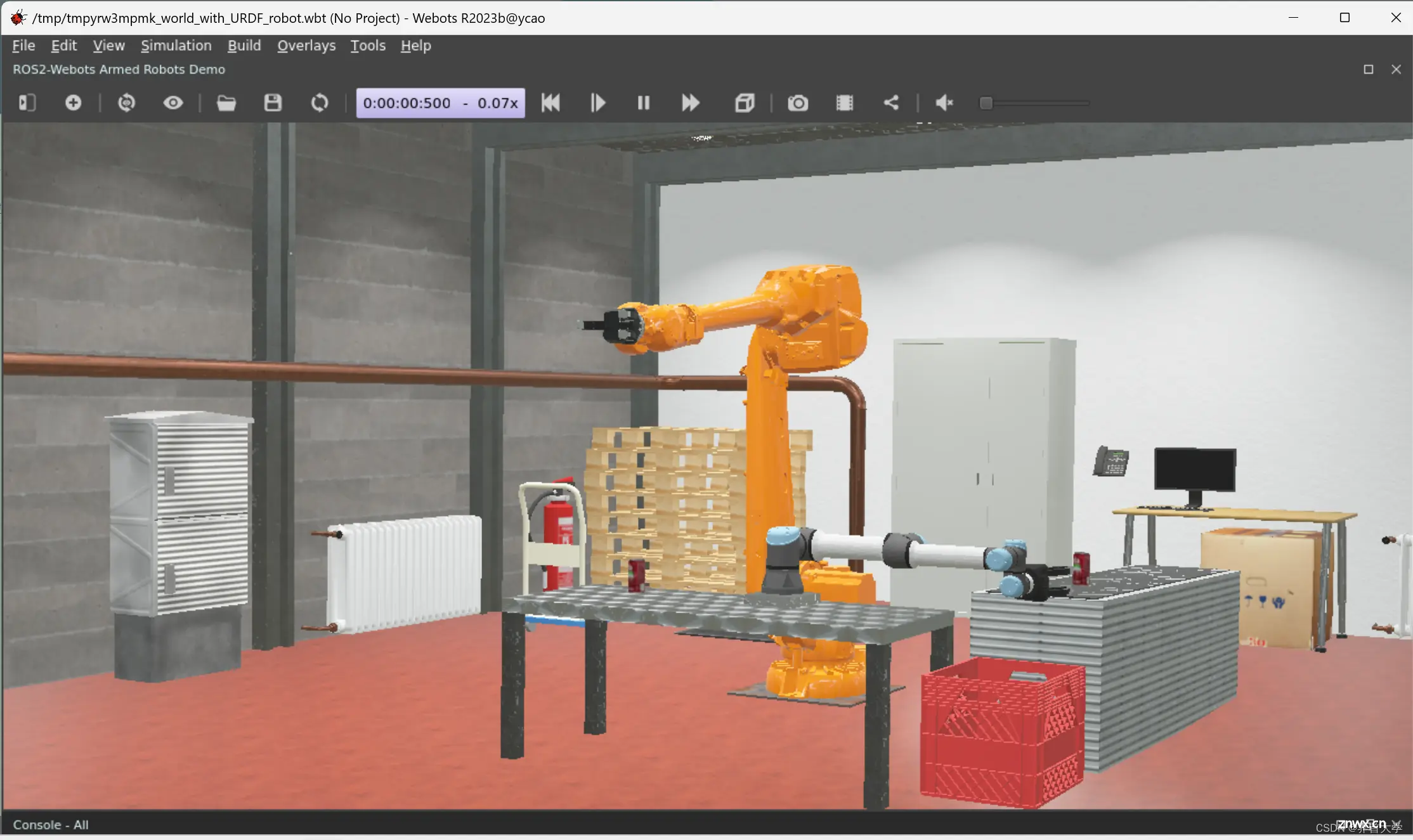
ROS2高效学习第十章--ros2高级组件其四之webots_webotsros2...