
《机器人SLAM导航核心技术与实战》第1季:第9章_视觉SLAM系统视频讲解【第1季】9.第9章_视觉SLAM系统-视频讲解【第1季】9.1.第9章_视觉SLAM系统_ORB-SLAM2算法(上)-视频讲解【第1季】9.1.第9章_视觉SLAM系统_O...

视觉SLAM实验要在Ubuntu20.04系统上使用ROS跑ORB-SLAM3,所以把安装过程总结记录下来。ROS全称RobotOperatingSystem(机器人操作系统)ROS是适用于机器人的开源元操...
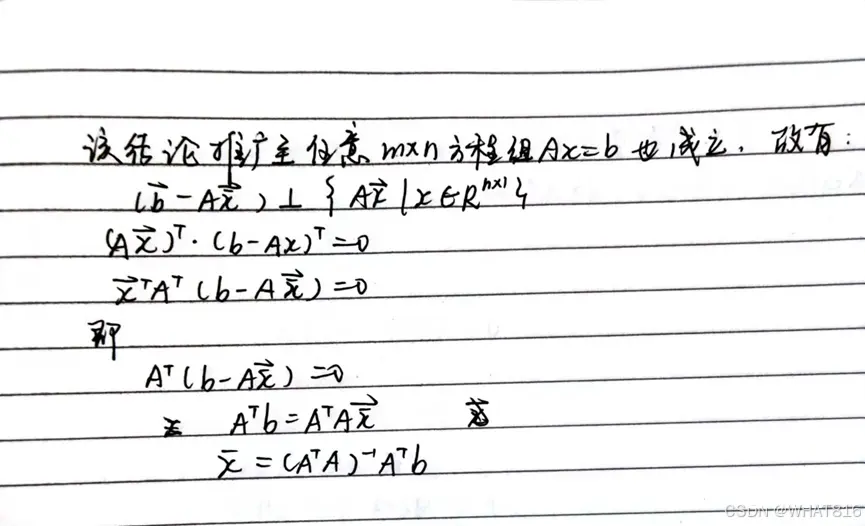
《视觉SLAM十四讲》第六章的习题解答_视觉slam14讲习题...

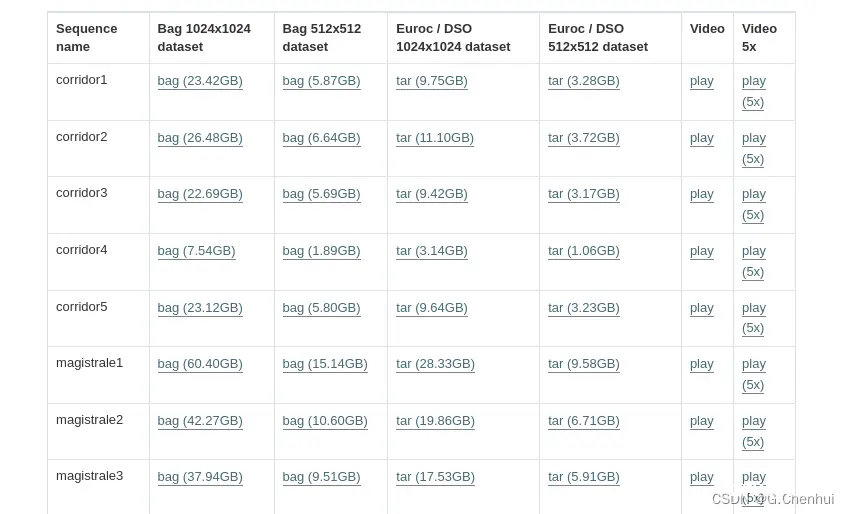
基于ORB-SLAM3库搭建SLAM系统https://github.com/UZ-SLAMLab/ORB_SLAM3基于Gazebo搭建移动机器人,并结合SLAM系统进行定位和建图仿真;在前述工作基础上进行运...
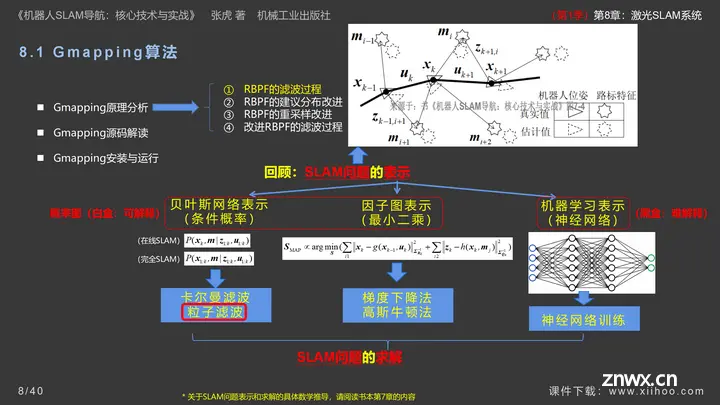
《机器人SLAM导航核心技术与实战》第1季:第8章_激光SLAM系统视频讲解【第1季】8.第8章_激光SLAM系统-视频讲解【第1季】8.1.第8章_激光SLAM系统_Gmapping算法-视频讲解【第1季】8.2.第8章_激光SLAM系统_Carto...
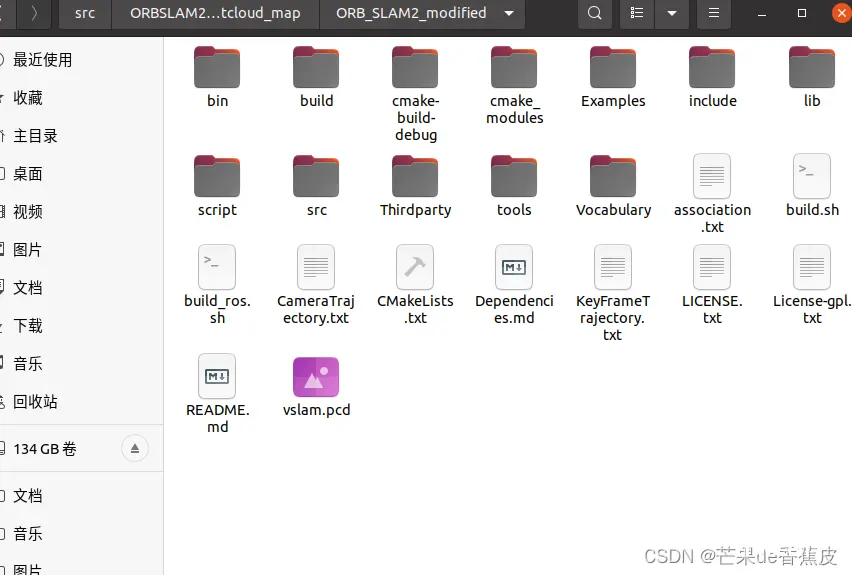
最近用orb-slam2跑了一下自己的数据集,由于是稀疏点云建图,效果并不是很理想,看到别人建的稠密点云地图效果还可以,就想着看看效果,参考了网上很多大佬的博客,也踩了不少坑,为避免遗忘,索性记录下来。_orbs...

然后进入Thirdparty→DBoW2,打开CMakeLists.txt,找到find_package(OpenCV3.2QUIET),把版本号改成自己的版本,也就是4.2。如果是用小鱼方法安装的ros,以下安...
ORB-SLAM3GitHub链接:Link在ORB-SLAM3的CMakeLists.txt中会有检查,如果不满足会有报错。这里我选择安装的是Pangolinv0.6,下载链接:Link如果有报...
SLAM的全称是SimultaneousLocalizationandMapping即时定位与地图构建,为解决机器人自主导航的问题。人在一个未知的环境下也不知如何行进,我们闭着眼睛也不知道怎么走路,机器人...
安装基础库sudoaptupdatesudoaptinstallcmakegccg++gitsudoaptinstallpkg-config创建源码目录在home目录下新建repos文件夹用于存放源码...