2024-08-13 14:31:01
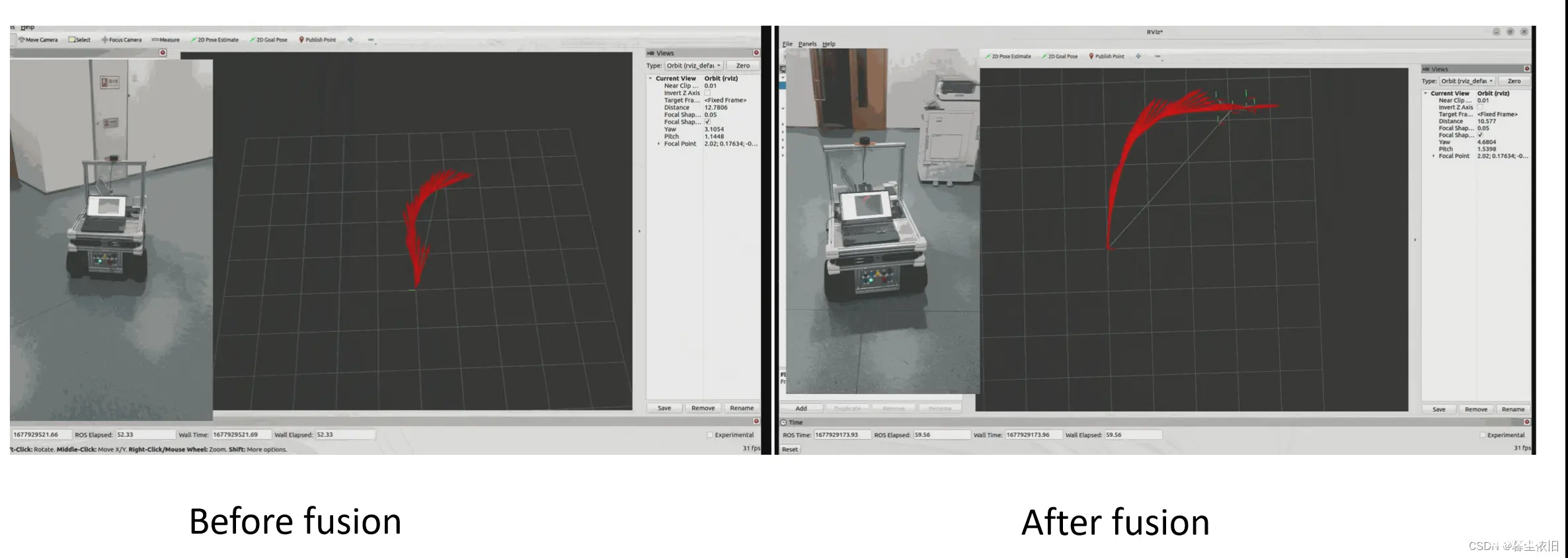
本文介绍了如何在ROS2系统中,通过robot_localization包融合IMU和里程计数据,以提高cartographer的建图精度和稳定性。文章详细阐述了从数据接收、发布到融合的流程,并提供了相关配置参...

2024-06-16 11:07:09
在Ubuntu20.04系统与ROSNoetic下实现Cartographer的安装、建图与定位(纯定位)。_cartographer安装...
本文介绍了如何在ROS2系统中,通过robot_localization包融合IMU和里程计数据,以提高cartographer的建图精度和稳定性。文章详细阐述了从数据接收、发布到融合的流程,并提供了相关配置参...
在Ubuntu20.04系统与ROSNoetic下实现Cartographer的安装、建图与定位(纯定位)。_cartographer安装...