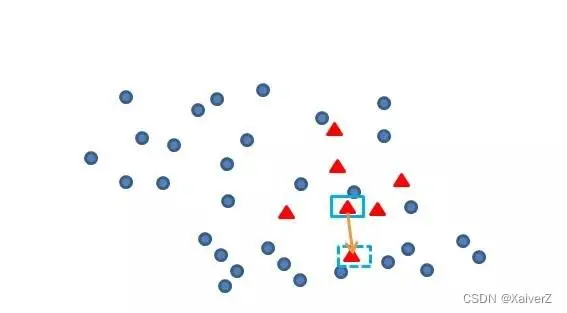
人工智能/机器学习基础知识——欠采样&过采样(UnderSampling&OverSampling)_oversampling...
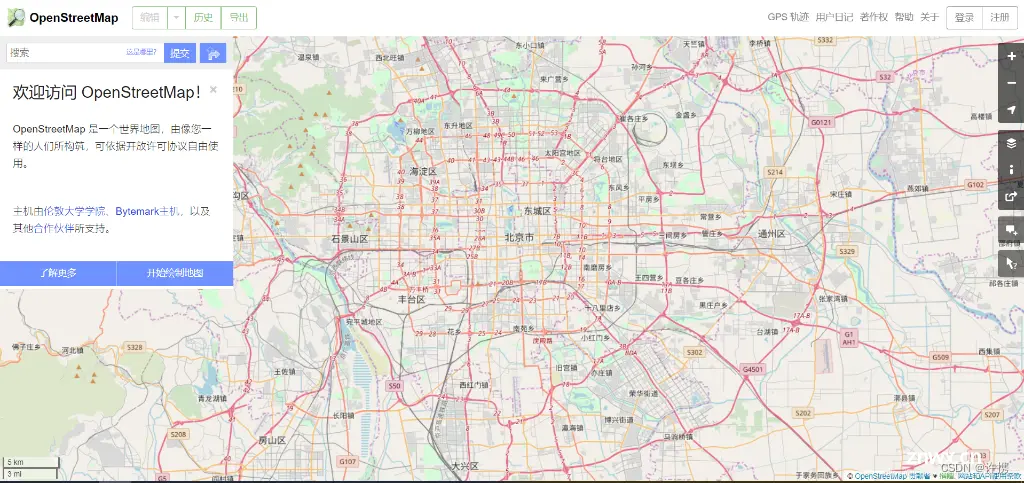
WebGIS是一种利用Web技术实现服务器与客户端(C/S端)之间通信的地理信息系统。它允许用户在网络上动态访问、共享和操作地理空间数据。WebGIS通常由GIS服务器和客户端组成,其中GIS服务器负责处理数据请求并...
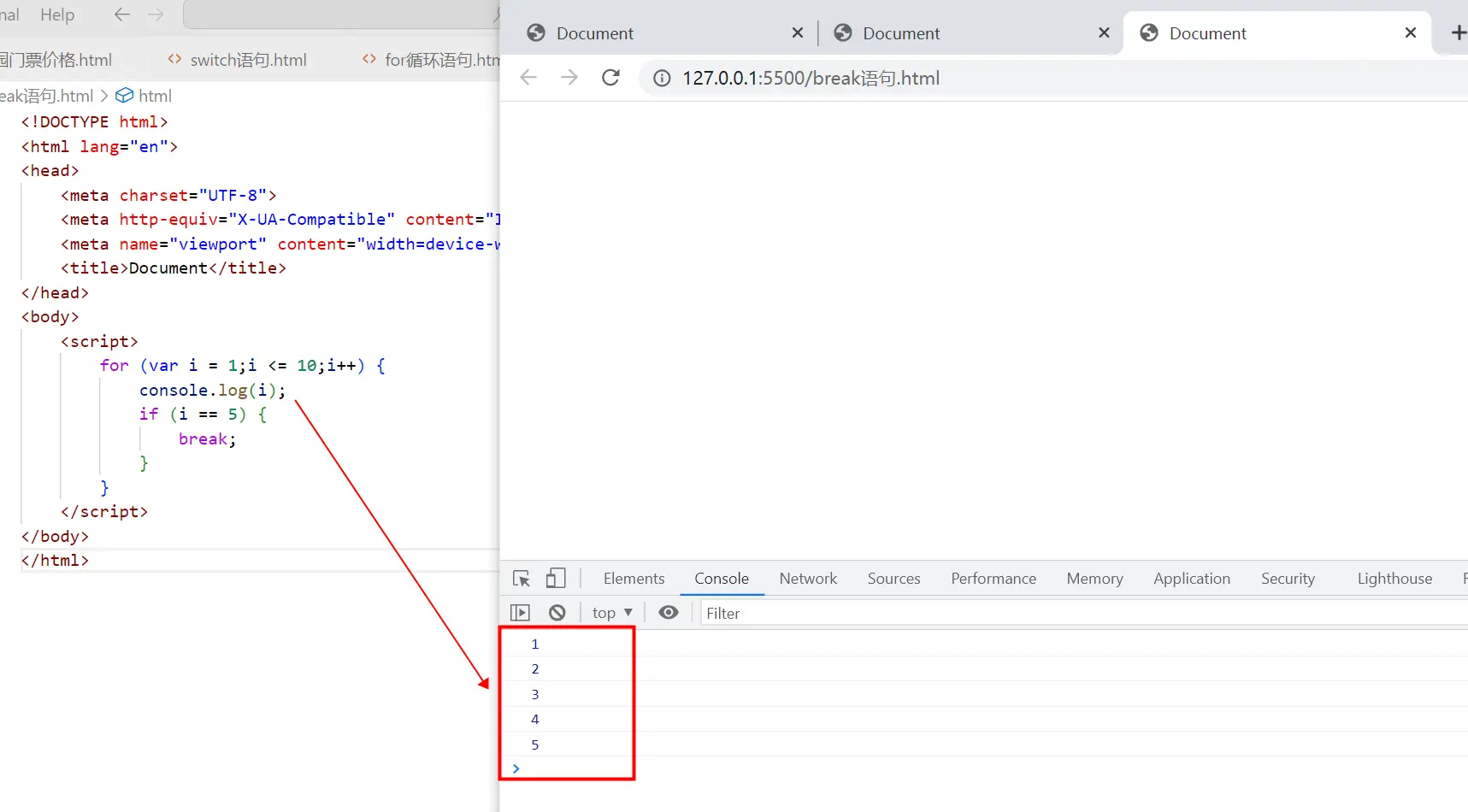
该章节内容不多,就是JavaScrip的两个知识点,break语句和continue语句。_前端break...

一步步带你学习通过Ciscopackettracer学习路由交换技术。其中金黄色闪电图标为自动连接用户模式:用户模式下可进行的操作较少我们一般不在用户模式下操作2.特权模式特权模式下可操作的命令相对较多...
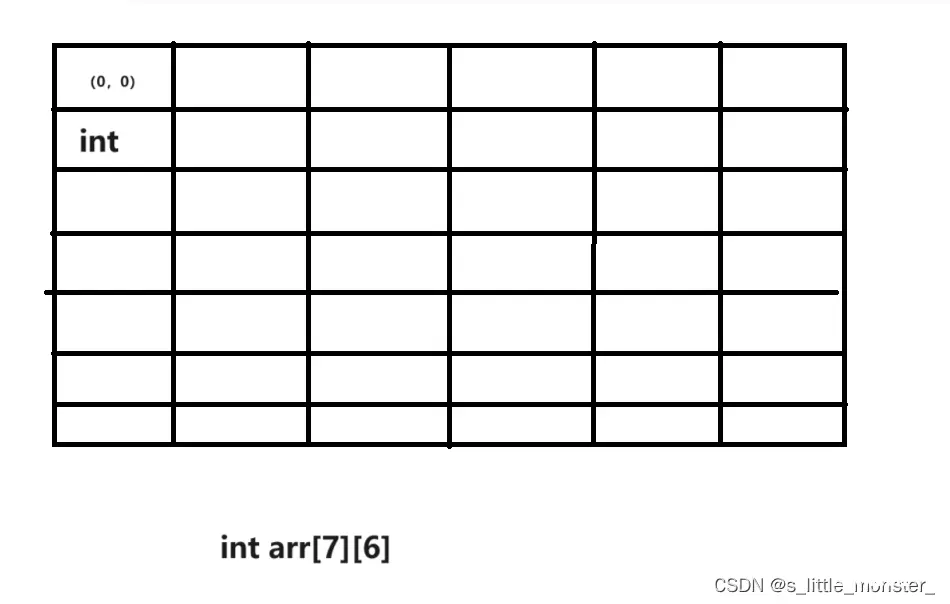
进入C语言的门槛吧...

κ0μ10⋯0。_多维vmf分布...
本章节讲解Rust的Web开发框架的介绍和对比。ActixWeb、Axum、Rocket、Warp、Tide、Poem、Pavex、Hyper等框架。主要教材参考《TheRustProgrammingL...

以上就是今天所有的内容,方法有很多,大家可以根据造作步骤一一进行实践,祝愿大家的LInux之旅途愉快。_linux下载及环境部署...
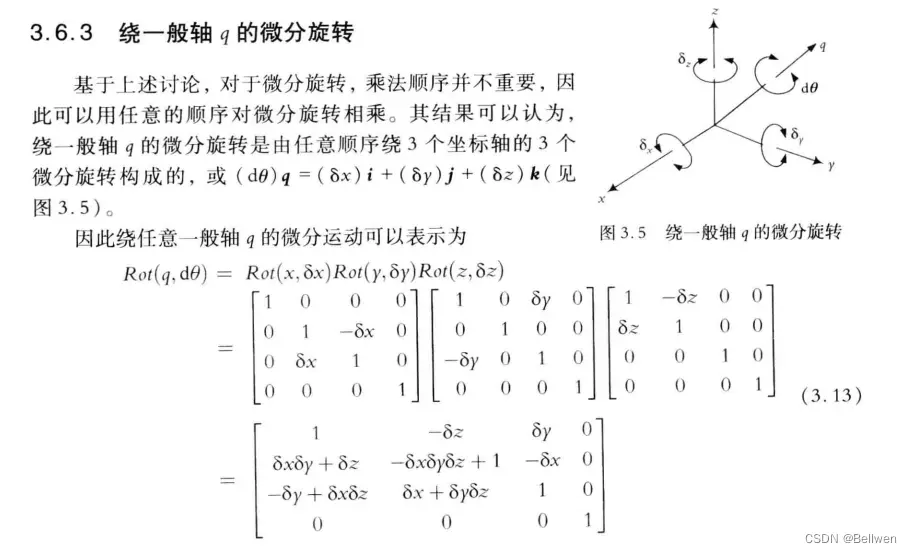
通过学习本章内容,利用公式,已知机器人关节速度,利用雅可比矩阵可以得到机器人手的运动速度;已知机器人手的运动速度,求雅可比矩阵的逆可以得到机器人各关节的速度。同时也学习了不使用雅可比矩阵求关节速度的方法,利用机...
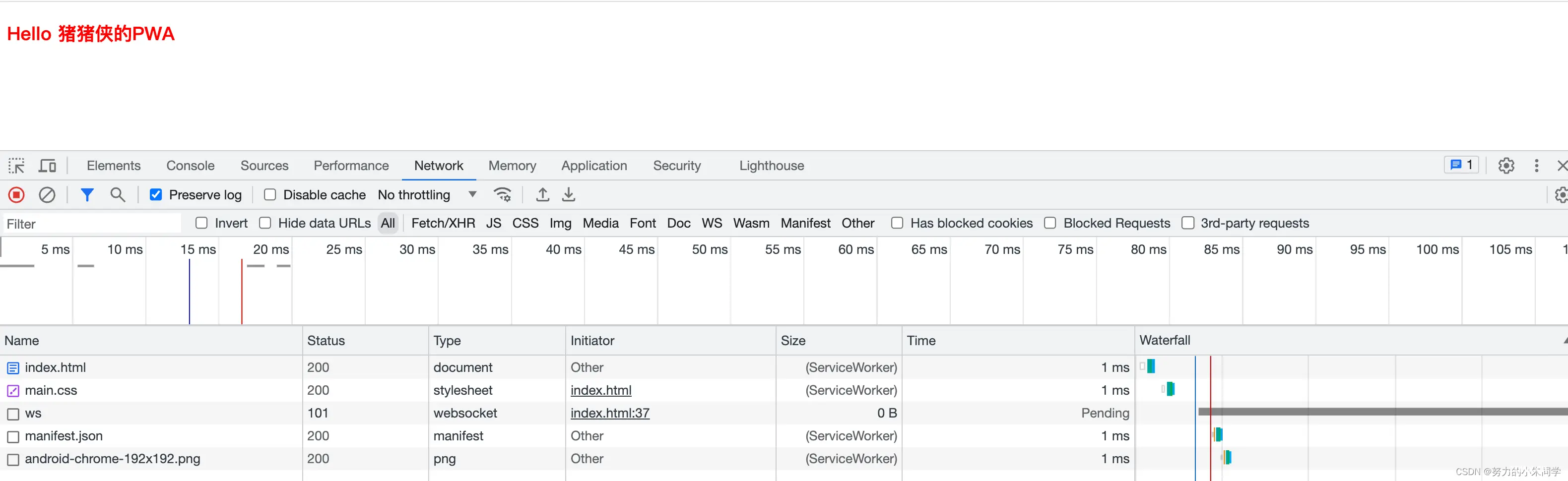
PWA主要拥有以下几种特点:①跨平台②可安装③离线访问④推送通知⑤快速加载⑥可搜索⑦热更新。PWA的实现依赖于多种技术实现,其中最核心的技术为`ServiceWorker`、`WebAppMa...