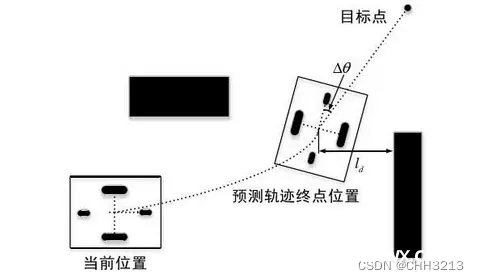
动态窗口算法(DynamicWindowApproaches,DWA)是基于预测控制理论的一种次优方法,因其在未知环境下能够安全、有效的避开障碍物,同时具有计算量小,反应迅速、可操作性强等特点。D...
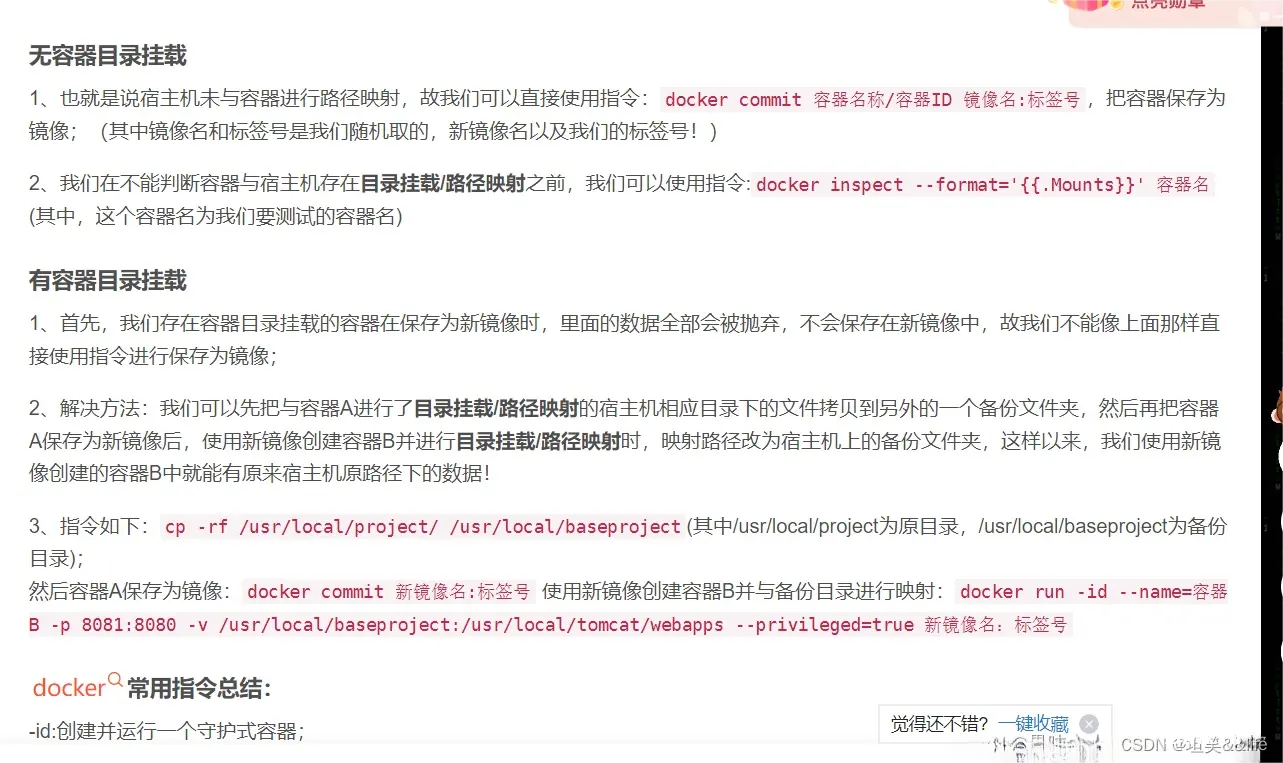
dockerlogs命令(跟踪容器的日志并输出日志的时间)、修改默认数据存储路径、查看docker镜像的dockerfile、dockerhistory显示不全、有无容器目录挂载_dockerlogs...
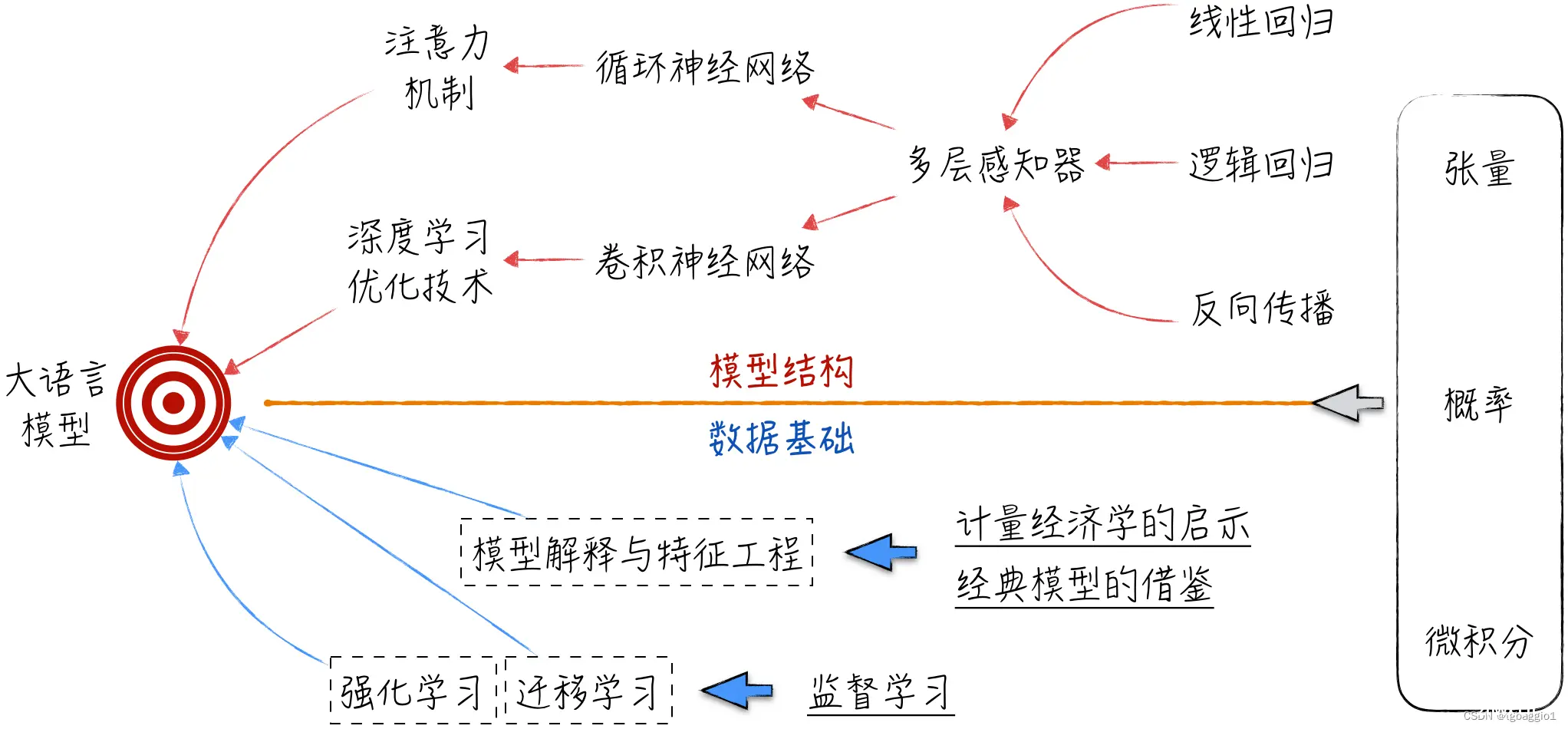
考虑到像ChatGPT这样的大语言模型代表了自然语言处理的最新成果,因此,一个更具体的学习方法是从零开始理解并构建ChatGPT。接下来,我们来看看实现这一目标所需的知识体系,如下图所示。图1在结构层面上,大语言...

本文采用强化学习中的Q-learning算法规划机器人的运动路径,做了算法概念学习、算法代码设计、算法参数调优、算法训练测试等具体工作,查阅相关开发资料后,决定应用QTCreator5.0.2作为开发...

文章讲述了如何在Vue应用中结合ElementUI组件与Electron环境,实现文件夹路径的获取,包括使用`ipcRenderer`进行通信,以及处理无文件时的路径问题。...
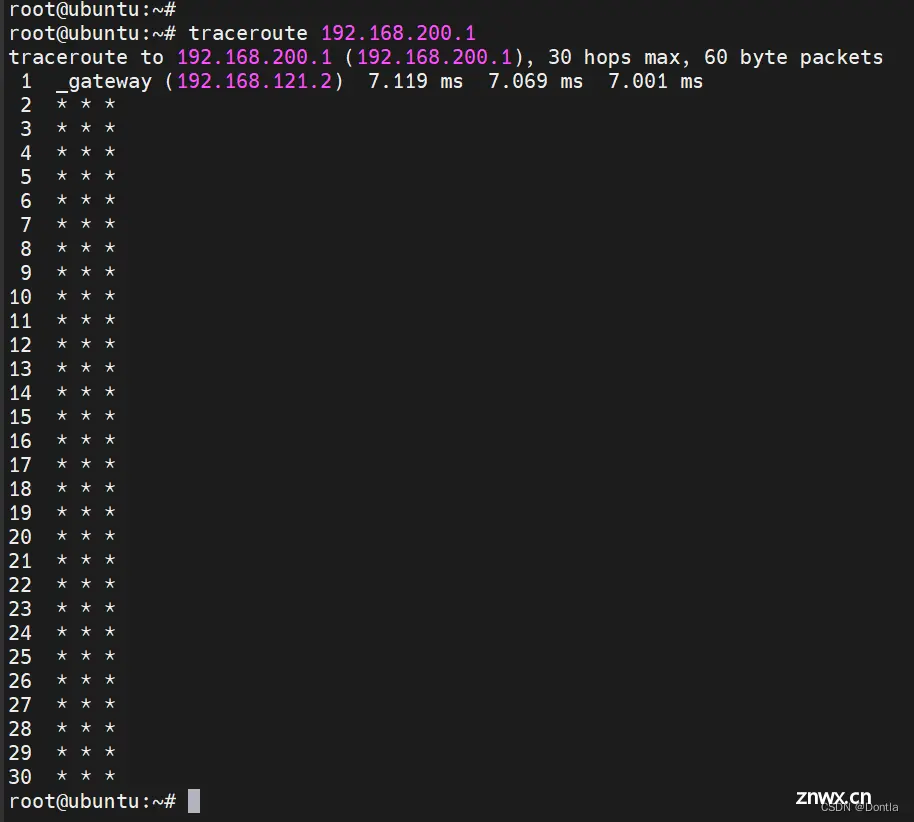
有时候,即使traceroute完成了,最后一跳也可能不显示目标主机。这可能是因为目标主机的防火墙设置阻止了ICMP或UDP响应。_linuxtrace命令...

D*Lite算法结合D*算法反向搜索策略优化LPA*算法框架,使其可适应变起点的路径修正。本文图文详解D*Lite算法原理,并提供ROSC++、Python、Matlab三种仿真环境的实验代码_pyth...

HybridA*算法通过结合连续状态空间搜索、运动约束考虑和轨迹优化等技术,弥补了普通A*算法在高维连续空间和的不足,提高了路径规划的效率和鲁棒性,广泛应用于车规级路径规划。本文详细图解HybridA*算法的原...
C:\\Users\\HP>wsl无法将磁盘“C:\\Users\\HP\\AppData\\Local\\Packages\\CanonicalGroupLimited.Ubuntu_79rhkp1fndgs...
本示例概述了机器人系统工具箱™中可用的轨迹类型。在机械手运动、规划和控制应用中,必须为机器人选择轨迹。本示例有三个主要部分。第一部分展示了机械手使用的轨迹类型,第二部分演示了生成轨迹的功能,最后一部分则展示了更多...