
正在解压ros-noetic-mavros(1.18.0-1focal.20240304.150259)并覆盖(1.15.0-1focal。正在解压ros-noetic-mavros-extras(1...
demo.ipxe的作用:打破无限循环的另一种方法是使用嵌入式脚本构建iPXEboot.php的作用:启动菜单配置文件在/root/ipxe/src目录下vimdemo.ipxe文件在/root/ipx...
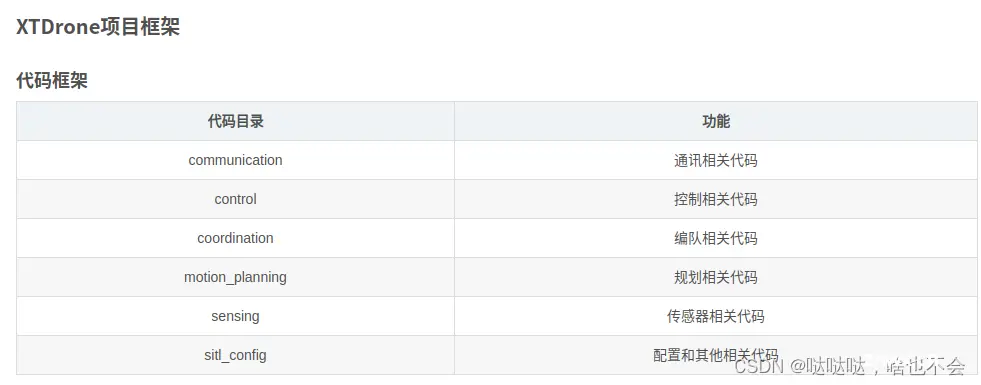
PX4-Autopilot仿真平台是由PX4官方提供的集虚拟px4固件、真机烧录固件、gazebo环境及模型于一体的平台,用户可以自己编写程序,通过mavros接口与虚拟px4固件进行mavlink协议的通讯,...
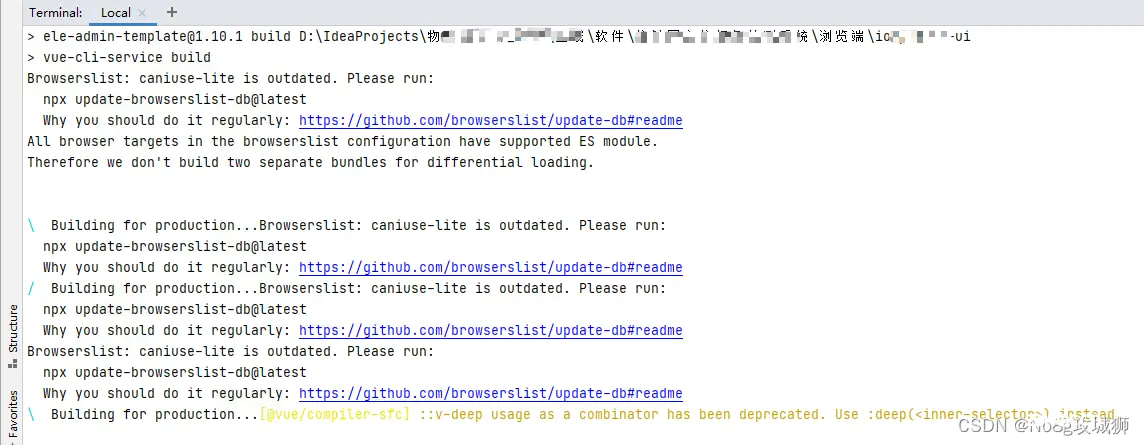
最近项目打包的时候,本地打包没有问题,且能正常运行,但是一旦通过CI/CD进行自动构建和发布的时候,就会报错Browserslist:caniuse-liteisoutdated.Pleaserun:...
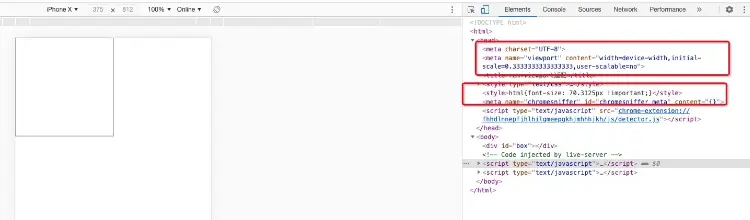
写在开头点赞+收藏学会7种方案解决移动端1px边框的问题造成边框变粗的原因css中的1px并不等于移动设备的1px,这是由不同手机由不同像素密度,在window对象中有一个devicePix...

每种包管理工具各有侧重,npm作为Node.js的原生工具,是最基础且普遍的选择;Yarn在性能和稳定性上有所优化,特别是在大型项目中表现更佳;cnpm解决了特定地区的网络问题;npx则简化了命令行工具的使用流程...
前端页面设计的工具推荐---PxCook_pxcook...
进入PX4-Autopilot文件夹,继续下载未下载完的组件。完成后重启系统,并进入PX4-Autopilot文件夹进行测试。再次测试,还是同样错误,经过搜索,发现是未连接硬件的正常现象。Gazebo,PX4和M...