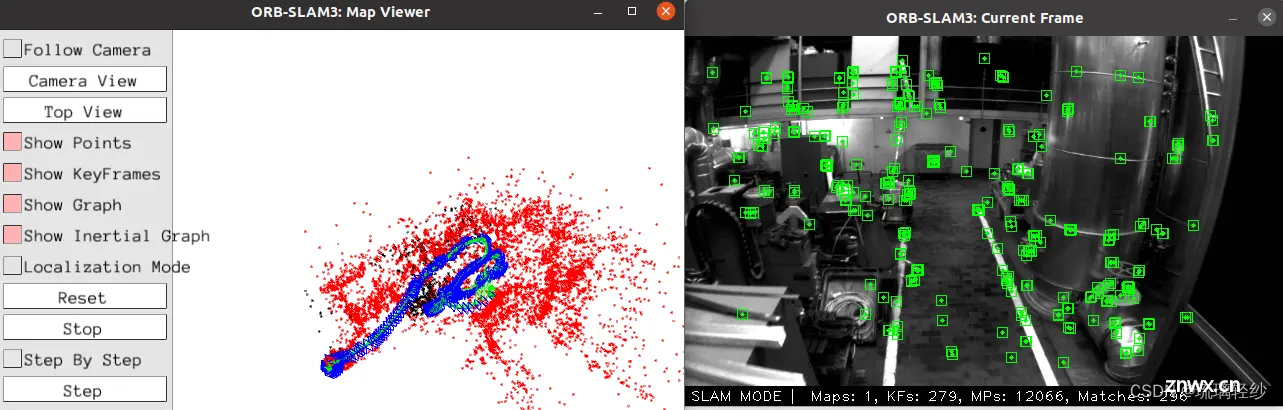
所提供的图像具有高动态范围,事先进行了光度标定,用20Hz的帧率采集,分辨率为1024像素*1024像素;需要下载数据集dataset-room1_512_16和rgbd_dataset_freiburg1_de...

【基于Ubuntu20.04Noetic的A-LOAM激光雷达SLAM实现】保姆级教程|A-LOAM|SLAM激光雷达建图|Rviz可视化|全过程图文by.Akaxi_aloam20.04...

激光SLAM(SimultaneousLocalizationandMapping)算法作为自动驾驶技术的核心组成部分,凭借其高精度的定位和环境建模能力,为自动驾驶系统的安全性和可靠性提供了重要保障。本文详细介绍...
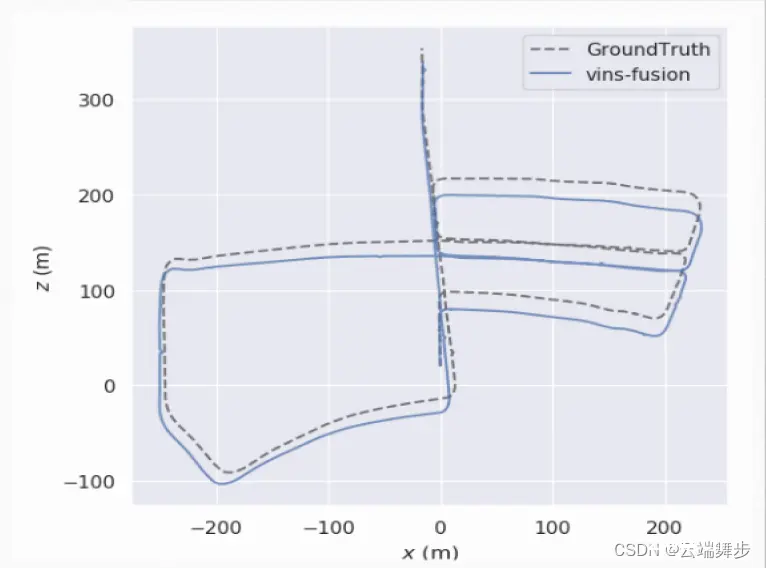
evo是一款用于视觉里程计和SLAM问题的轨迹评估工具.核心功能是能够绘制相机的轨迹,或评估轨迹与真值之间的误差.支持多种数据集的轨迹格式(TUM、KITTI、EuRoCMAV、ROS的bag),同时支持...

SLAM基础知识:前端和后端_slam的前端...
SplaTAM全称是《SplaTAM:Splat,Track&Map3DGaussiansforDenseRGB-DSLAM》,是第一个(也是目前唯一一个)开源的用3DGaussianSpla...