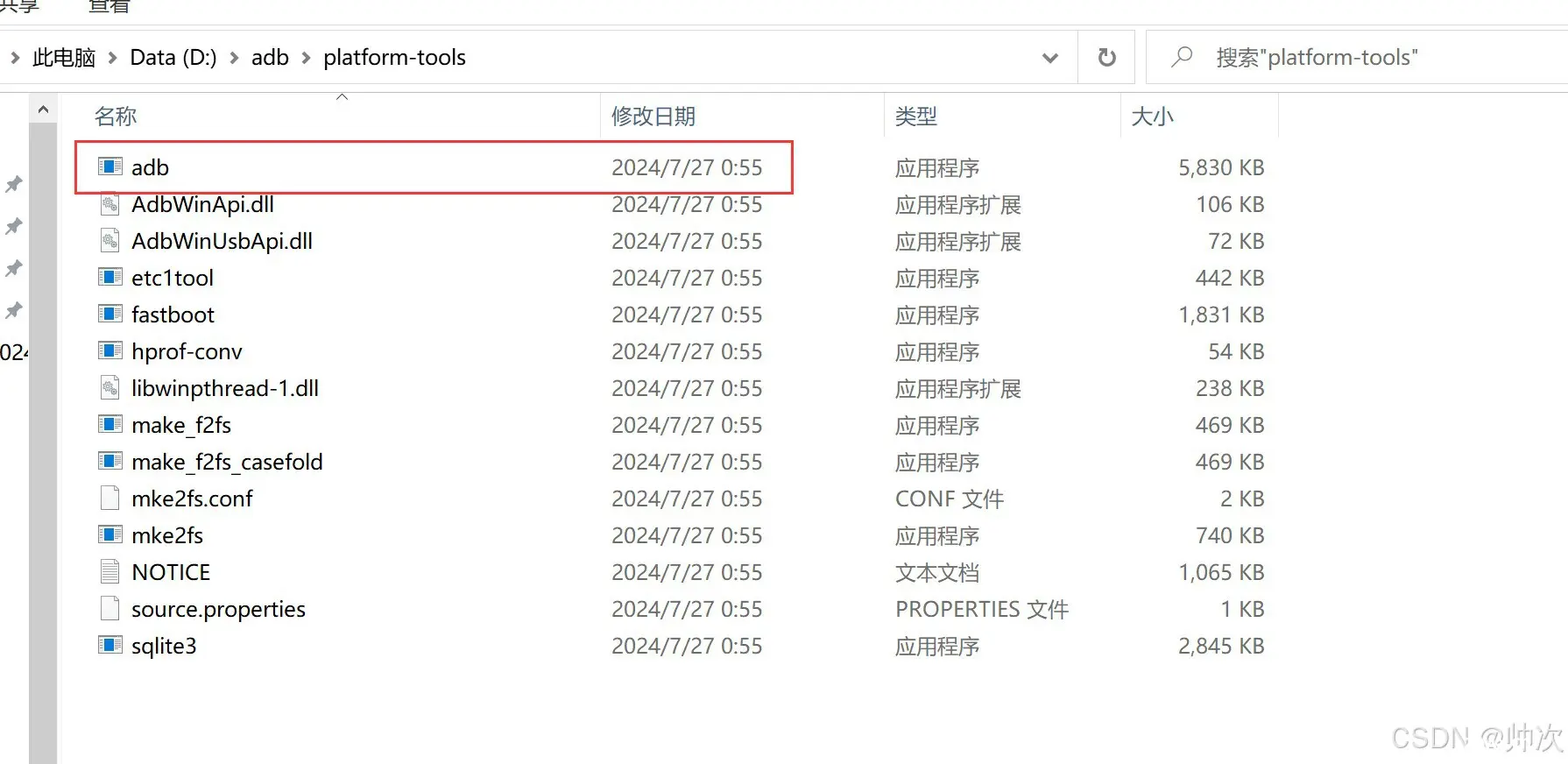
ADB(AndroidDebugBridge)是一款功能强大的命令行工具,广泛用于Android开发和设备管理。本文详细介绍了如何在Windows、macOS和Linux系统上安装和配置ADB。首先,用户需要从...
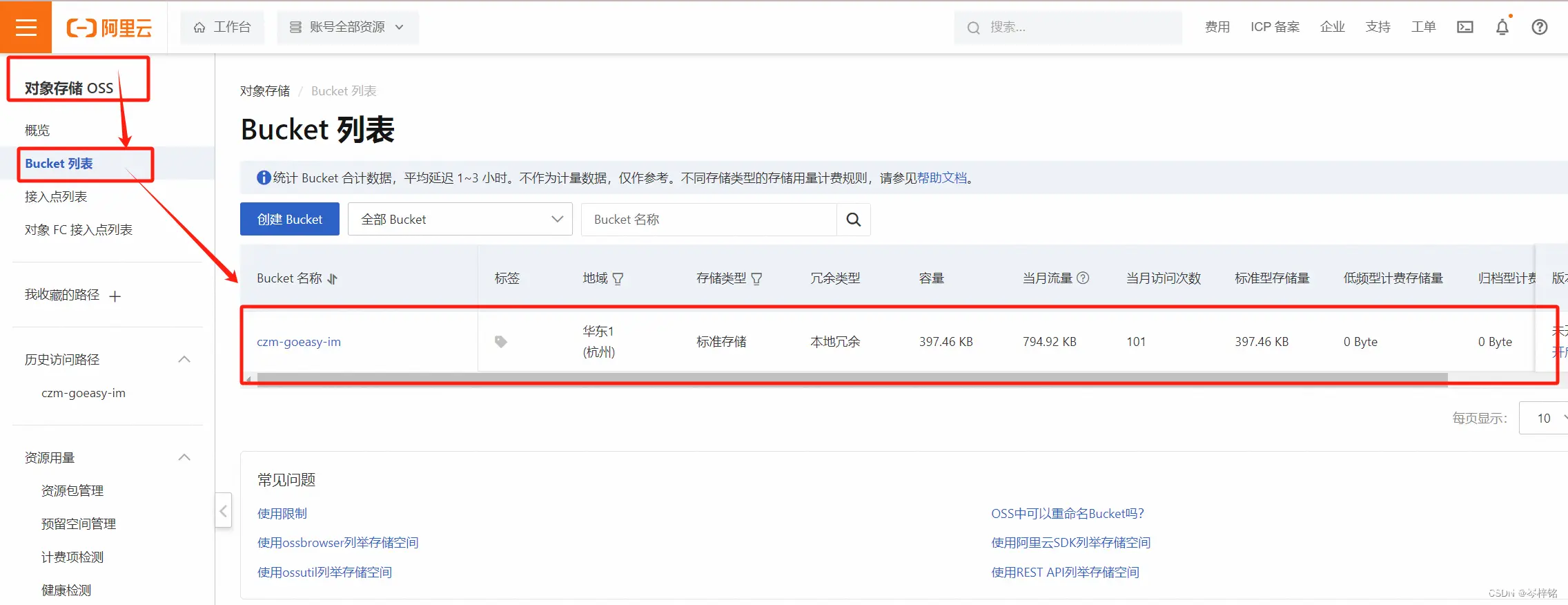
全名叫“阿里云对象存储OSS”,就是云存储,前端发文件到服务器,服务器不用再存到本地磁盘,可以直接传给“阿里云OSS”,存在网上。_oss...

在Ubuntu22.04上安装ROS(RobotOperatingSystem)的过程可以分为几个主要步骤。请注意,ROS有不同的版本(如ROS1的Melodic、Noetic等,以及ROS2的Foxy、Hu...
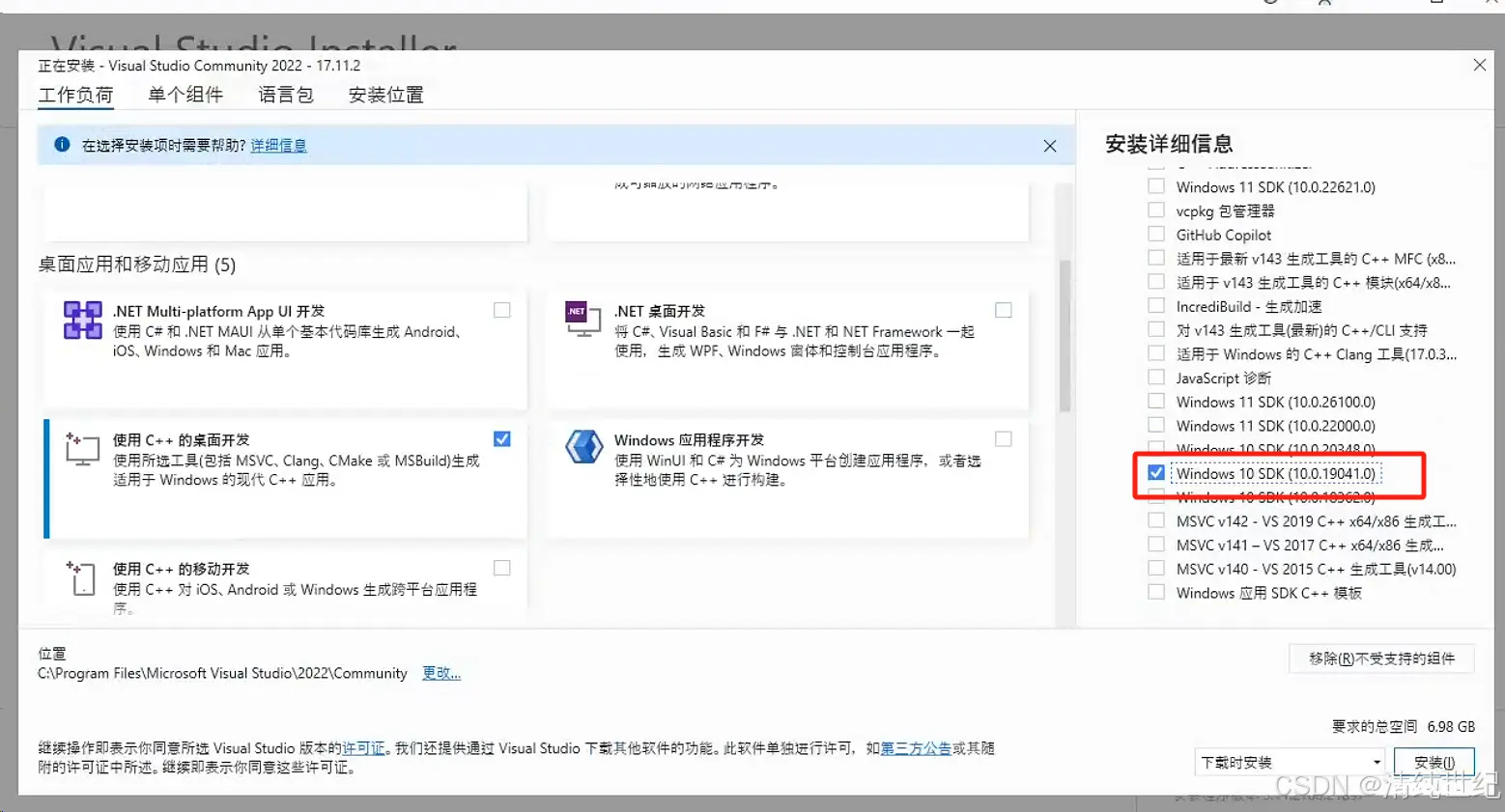
1、首先下载:MicrosoftVisualC++BuildTools。然后,安装“使用C++的桌面开发”并确保安装详细信息的前两项勾选。二、安装:使用C++的桌面开发。安装好后重新pip安装库即可。_err...

ROS基础入门——实操教程前言本教程实操为主,少说书。可供参考的文档中详细的记录了ROS的实操和理论,只是过于详细繁杂了,看得脑壳疼,于是做了这个笔记。RubyRose,放在这里相当合理本文初编辑于2024年10月4日CSDN主页:https://...
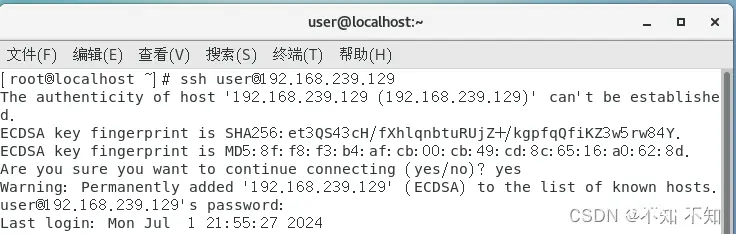
SSH是由IETF(TheInternetEngineeringTaskForce)制定的建立在应用层基础上的安全网络协议。它是专为远程登录会话(甚至可以用Windows远程登录Linux服务器进行文件...

此外,直接使用rpm命令安装yum可能会绕过一些重要的依赖检查和配置步骤,因此请务必小心操作,并确保你了解每一步的含义和潜在影响。如果你选择直接在原文件中修改,可以使用文本编辑器(如vi、nano等)打开CentO...
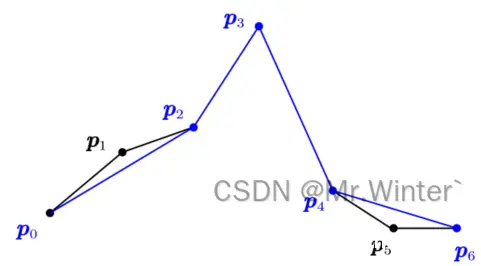
道格拉斯-普克算法(Douglas–Peucker)是一种经典的路径关键点提取算法,其基于分治思想,以采样前后路径误差最小化为目标,提取路径关键点。本文一步步图解Douglas–Peucker算法的流程,并给出R...

本文介绍了三种方法来永久修改Docker容器中的hosts文件:1)在`dockerrun`命令中添加`--add-host`参数;2)在DockerCompose的`yaml`文件中使用`extra_hosts`;...
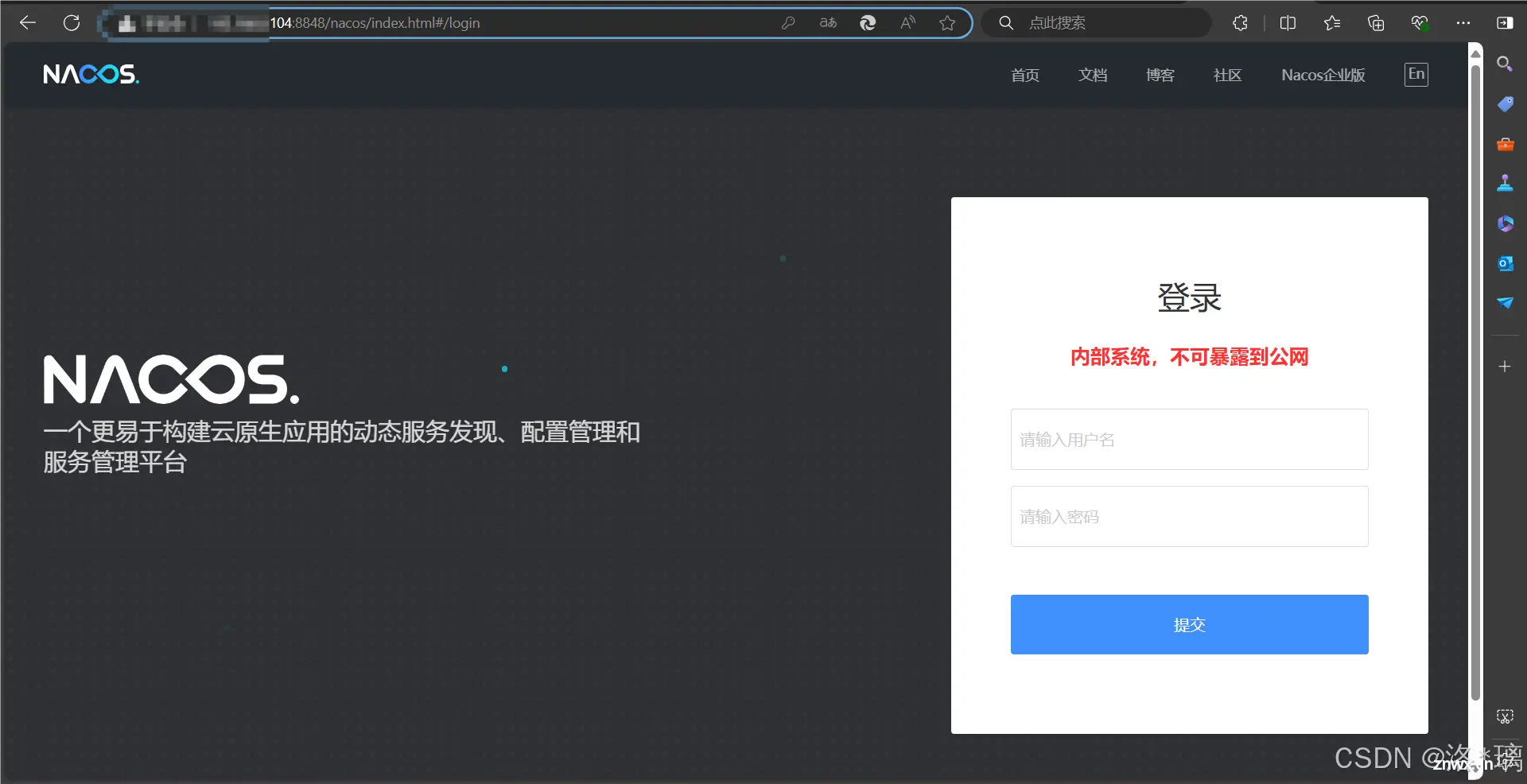
Nacos是一个开源的动态服务发现、配置管理和服务管理平台,广泛用于微服务架构中。在本文章中,博主将详细介绍如何使用来安装,以便快速启动并运行这个强大的服务管理工具。_docker部署nacos...