2024年华数杯全国大学生数学建模竞赛A题机械臂关节角路径的优化设计思路代码分析
nancheng_single 2024-08-26 16:31:01 阅读 86
A题"机械臂关节角路径的优化设计":运动学逆解模型、多目标优化算法(如NSGA-II或MOEA/D)、路径规划算法(如RRT或A*算法)、动力学模型、人工势场法避障算法、启发式算法(如遗传算法或粒子群优化)等。
对于B题"VLSI电路单元的自动布局":线长估计模型(如修正HPWL模型)、密度评估模型、布线密度计算模型、多目标优化算法(如NSGA-II或SPEA2)、启发式算法(如模拟退火或遗传算法)、空间数据结构(如四叉树)、力导向算法等。
对于C题"老外游中国":多准则决策模型(如AHP或TOPSIS)、图论模型、旅行商问题(TSP)求解算法、多目标优化算法(如NSGA-II或MOEA/D)、启发式算法(如蚁群算法或遗传算法)、文本分析和自然语言处理模型等。
难度排序从高到低:B题 > A题 > C题。
B题涉及到复杂的VLSI布局问题,需要综合考虑多个目标和约束,技术难度较高;A题需要深入理解机械臂的运动学和动力学,同时涉及复杂的路径规划,难度仅次于B题;C题虽然也涉及复杂的优化问题,但更偏重于数据处理和决策分析,相对来说更容易入手。
2024华数杯数学建模竞赛ABC题完整成品文章和全部问题的解题代码更新如下:https://www.yuque.com/u42168770/qv6z0d/dcgf4vr5t7bdtb0o
2024 年华数杯全国大学生数学建模竞赛题目

A 题机器臂关节角路径的优化设计机器臂是一种由多个连杆和关节组成的自动化装置,广泛应用于工业生产、精密操作、危险环境作业和物流等领域。其主要作用包括提高生产效率、执行精密操作、适应恶劣环境以及优化物流流程。当前有关机器臂的研究重点包括运动学与动力学建模、关节角路径的优化设计以及路径规划等。这些研究旨在提升机器臂的性能和应用范围,确保其在各种复杂任务中的高效性和精确性。其中,关节角路径的优化设计尤为重要,它直接影响着机器臂的精度和能效。
关节角路径的优化设计涉及到多个相互冲突和影响的目标。最小化输出误差(即机器人实际动作与预期动作之间的偏差)是优化任务的首要目标,特别关注末端误差这一关键部分。末端误差描述的是一次任务中机器臂末端部位与目标位置之间的位置偏差。例如,在使用机器臂拾取货物时,通常更关注末端是否准确到达货物的位置,而不太关注各关节的具体位置。
在执行一次任务的过程中,由于各个关节之间的杠杆长度不变,机器臂通常通过调整关节角度来完成任务。而在调整关节角度的过程中会由于关节转动、机器臂克服重力势能做功等产生各种能耗,如何在末端误差允许的范围内使得能耗最小化,是另一个研究重点。例如,在机器臂拾取货物的过程中,末端不一定要精准地到达目标位置的正中心,如果对于关节角路径的优化能减少能耗,微小的误差是被允许的。
在工业、服务业等各个领域,机器臂通常需要执行多次任务。比如,在工业生产线上,机器臂需要对在不同位置的货物依次完成抓取;为了更好地完成任务,需要考虑末端误差和能耗,同时对底座移动路径和关节角路径进行优化设计。
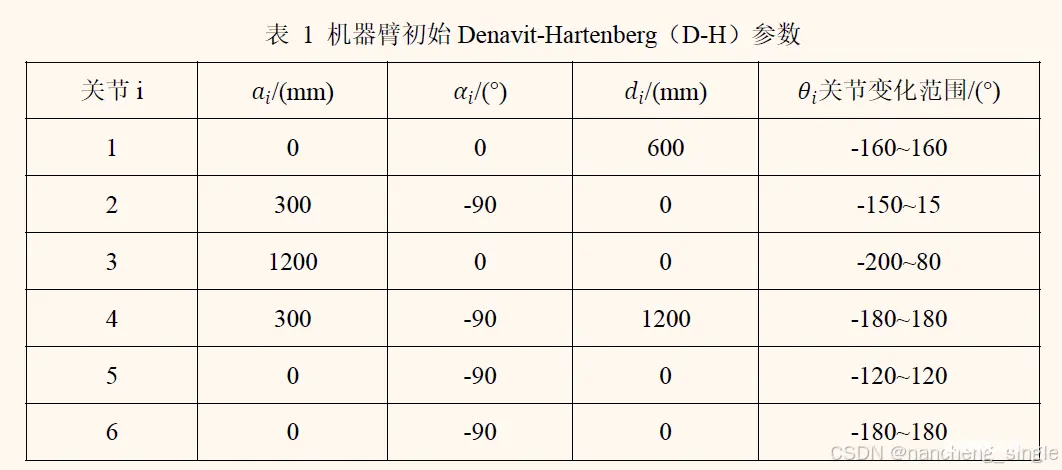
六自由度机器臂在工业应用中因其极高的灵活性和多功能性而被广泛使用,能够处理各种复杂的任务。本文中所有任务均依赖于六自由度机器臂的执行,需解决的问题如下:问题1 为方便后续建模,请先绘制出零位状态(的六自由度机器臂简图,机器臂初始参数(包括关节的初始位置,角度等)如表1 所示。假设机器臂收到一次抓取货物的任务,目标点相对于机器臂的位置为(1500mm,1200mm,200mm),请建立机器臂运动的数学模型,并以最小化末端误差为目标,对机器臂的关节角路径进行优化。
表1 机器臂初始Denavit-Hartenberg(D-H)
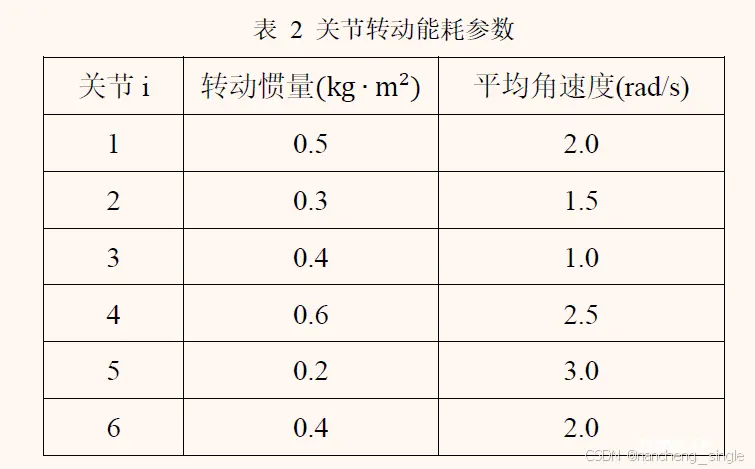
问题2 在第一问的基础上,已知机器臂质量和末端载重之和为5kg,各个关节的转动惯量和平均角速度如表2 所示。假设末端误差(末端误差指目标点坐标与机器臂端部坐标之间的欧式距离)允许的范围为±200mm,请以最小化末端误差和能耗为目标,对机器臂的关节角路径进行优化。
表2 关节转动能耗参数关节i 转动惯量(kg ∙ m²)
问题3 在问题二的基础上,假设机器臂收到一次货物抓取任务,需要绕过障碍物抓取一个货物,收到指令后,机器臂底座(移动过程中视为质点,为了简化问题,假设移动的能耗不考虑,只考虑机器臂抓取过程中的能耗)先移动到目标点附近,然后再进行抓取动作。机器臂底座栅格图中默认无法沿斜线移动,机器臂底座需要回到起点。机器臂出发时的状态与问题一中的零位状态一致。机器臂的所有关节均无法从障碍上方越过进行物体抓取。请以最小化末端误差和能耗为目标,设计出最优底座移动路径和最优关节角路径,并将底座移动路径用栅格图可视化。货物和障碍物的位置见“附件.xlsx”中的Sheet1。
问题4 假设机器臂收到一次完整的货物抓取任务,需要绕过障碍物抓取多个货物,请以最小化末端误差和能耗为目标,设计出最优底座移动路径和关节角路径,并将底座移动路径用栅格图可视化。货物和障碍物的位置见“附件.xlsx”中的Sheet2。请在结果中明确给出总末端误差和总能耗。
A题模型的建立与求解
问题一模型的建立与求解
思路分析
2024年华数杯全国大学生数学建模问题一要求我们为六自由度机器臂建立运动学模型,并以最小化末端误差为目标,对机器臂的关节角路径进行优化。这是一个典型的机器人运动学逆解问题,同时也涉及到路径优化。首先,我们需要深入理解六自由度机器臂的结构和运动特性。六自由度机器臂通常由六个旋转关节连接而成,每个关节对应一个自由度,使得末端执行器能够在三维空间中实现任意位置和姿态。根据给定的Denavit-Hartenberg(D-H)参数,我们可以建立机器臂的正向运动学模型,描述末端执行器位置与关节角之间的关系。然而,我们的目标是求解逆运动学问题,即根据目标位置计算所需的关节角。这是一个复杂的非线性问题,通常存在多个解。我们需要设计一种方法来选择最优解,同时考虑关节角度的限制范围。优化目标是最小化末端误差,即实际位置与目标位置之间的欧氏距离。考虑到问题的非线性特性和多个局部最优解的可能性,我们需要选择合适的优化算法来求解这个问题。同时,我们还需要考虑算法的计算效率和数值稳定性,以确保在实际应用中的可行性。
增强型运动学逆解优化模型建立
为了解决这个复杂的机器臂关节角路径优化问题,我们提出一个增强型运动学逆解优化模型。这个模型结合了解析法和数值优化方法的优点,能够高效地求解逆运动学问题,同时实现路径优化。模型的核心思想是将逆运动学问题转化为一个优化问题,通过minimizing末端位置误差和关节角变化来找到最优的关节角配置。
首先,我们使用D-H参数建立正向运动学模型。对于六自由度机器臂,我们可以用一系列齐次变换矩阵来描述每个关节的运动。设
T
i
T_i
Ti为第i个关节的变换矩阵,则末端执行器的位置和姿态可以表示为:
T
=
T
1
T
2
T
3
T
4
T
5
T
6
T = T_1 T_2 T_3 T_4 T_5 T_6
T=T1T2T3T4T5T6
其中,每个
T
i
T_i
Ti可以用D-H参数表示为:
T
i
=
[
cos
θ
i
−
sin
θ
i
cos
α
i
sin
θ
i
sin
α
i
a
i
cos
θ
i
sin
θ
i
cos
θ
i
cos
α
i
−
cos
θ
i
sin
α
i
a
i
sin
θ
i
0
sin
α
i
cos
α
i
d
i
0
0
0
1
]
T_i = \begin{bmatrix} \cos\theta_i & -\sin\theta_i\cos\alpha_i & \sin\theta_i\sin\alpha_i & a_i\cos\theta_i \\ \sin\theta_i & \cos\theta_i\cos\alpha_i & -\cos\theta_i\sin\alpha_i & a_i\sin\theta_i \\ 0 & \sin\alpha_i & \cos\alpha_i & d_i \\ 0 & 0 & 0 & 1 \end{bmatrix}
Ti=
cosθisinθi00−sinθicosαicosθicosαisinαi0sinθisinαi−cosθisinαicosαi0aicosθiaisinθidi1
其中,
θ
i
,
α
i
,
a
i
,
d
i
\theta_i, \alpha_i, a_i, d_i
θi,αi,ai,di是D-H参数。
接下来,我们将逆运动学问题转化为一个优化问题。设目标位置为
P
d
=
(
x
d
,
y
d
,
z
d
)
P_d = (x_d, y_d, z_d)
Pd=(xd,yd,zd),当前末端执行器位置为
P
c
=
(
x
c
,
y
c
,
z
c
)
P_c = (x_c, y_c, z_c)
Pc=(xc,yc,zc),我们定义目标函数为:
f
(
θ
)
=
∥
P
d
−
P
c
∥
2
2
+
λ
∑
i
=
1
6
(
θ
i
−
θ
i
0
)
2
f(\theta) = \|P_d - P_c\|_2^2 + \lambda\sum_{i=1}^6 (\theta_i - \theta_i^0)^2
f(θ)=∥Pd−Pc∥22+λi=1∑6(θi−θi0)2
其中,
θ
=
(
θ
1
,
θ
2
,
.
.
.
,
θ
6
)
\theta = (\theta_1, \theta_2, ..., \theta_6)
θ=(θ1,θ2,...,θ6)是关节角向量,
θ
i
0
\theta_i^0
θi0是初始关节角,
λ
\lambda
λ是一个权重参数,用于平衡位置误差和关节角变化。
我们的优化问题可以表述为:
min
θ
f
(
θ
)
\min_{\theta} f(\theta)
θminf(θ)
s.t.
θ
i
m
i
n
≤
θ
i
≤
θ
i
m
a
x
,
i
=
1
,
2
,
.
.
.
,
6
\text{s.t. } \theta_i^{min} \leq \theta_i \leq \theta_i^{max}, i = 1, 2, ..., 6
s.t. θimin≤θi≤θimax,i=1,2,...,6
其中,
θ
i
m
i
n
\theta_i^{min}
θimin和
θ
i
m
a
x
\theta_i^{max}
θimax是每个关节角度的限制范围。
为了解决这个优化问题,我们提出一个混合优化算法,结合了梯度下降法和随机搜索的优点。这个算法能够有效地处理非线性优化问题,同时避免陷入局部最优解。
混合梯度随机搜索算法步骤
我们的混合梯度随机搜索算法(Hybrid Gradient Random Search Algorithm, HGRSA)包含以下主要步骤:
初始化:随机生成多个满足关节角度限制的初始解。这些初始解将作为多个搜索起点,提高找到全局最优解的概率。
梯度下降:对每个初始解应用梯度下降法。计算目标函数关于每个关节角的梯度,并沿着梯度方向更新关节角。梯度可以通过数值方法近似计算:
∂
f
∂
θ
i
≈
f
(
θ
+
ϵ
e
i
)
−
f
(
θ
)
ϵ
\frac{\partial f}{\partial \theta_i} \approx \frac{f(\theta + \epsilon e_i) - f(\theta)}{\epsilon}
∂θi∂f≈ϵf(θ+ϵei)−f(θ)
其中,
ϵ
\epsilon
ϵ是一个小的扰动,
e
i
e_i
ei是第i个单位向量。
投影:在每次更新后,将关节角投影到允许的范围内,确保满足约束条件:
θ
i
=
max
(
θ
i
m
i
n
,
min
(
θ
i
,
θ
i
m
a
x
)
)
\theta_i = \max(\theta_i^{min}, \min(\theta_i, \theta_i^{max}))
θi=max(θimin,min(θi,θimax))
随机搜索:在梯度下降达到一定迭代次数或收敛后,在当前最佳解的邻域进行随机搜索。这有助于跳出局部最优解。
自适应步长:根据目标函数值的变化动态调整步长,以在搜索初期快速接近最优解,而在后期进行精细搜索。
终止条件:当达到最大迭代次数或目标函数值的改善低于预设阈值时,算法终止。(后略)
声明
本文内容仅代表作者观点,或转载于其他网站,本站不以此文作为商业用途
如有涉及侵权,请联系本站进行删除
转载本站原创文章,请注明来源及作者。