
建议在环境搭建之前修改ubuntu软件源,建议改为。_ubuntu20.04px4...
此教程以Ubuntu22.04、ROS2Humble为例安装PX4无人机仿真环境。_ubuntu搭建px4仿真环境...

当我们点击全局统计(tab)的时候,由于Echart图标只会初始化一次,当第一次加载游戏设置(tab)的时候已经被初始化了,所以这个时候,虽然全局统计的display:none效果消失,图表容器width:100%起作...
【新品发布】正点原子ZYNQ7015开发板发布!ZYNQ7000系列、双核ARM、PCIe2.0、SFPX2,性能强悍,资料丰富!正点原子Z15ZYNQ开发板,搭载XilinxZynq7000系列芯片,核心板主控芯片的型号是XC7Z015CLG485-...
Ubuntu20.04+ROS+PX4+QGC开发环境搭建_ubuntu20.04px4ros编译环境...

RipXDAWPro是一款功能强大、创新前沿、易于使用的数字音频工作站,它可以让您对音乐进行全方位的控制和创作,无论您是专业的音乐制作人,还是业余的音乐爱好者。RipXDAW会自动分析素材的速度甚至是和弦、音符...

GPX(GPSeXchangeFormat)是一种基于XML的文件格式,主要用于存储GPS轨迹数据。GPX文件通常包含点(waypoints)、路径(routes)和轨迹(tracks)。这种格式广泛...
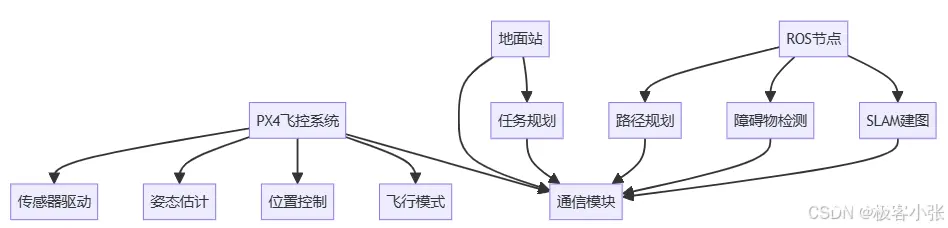
本项目旨在设计并实现一款高度自主的自动巡航无人机系统。该系统能够按照预设路径自主飞行,完成各种巡航任务,如电力巡线、森林防火、边境巡逻和灾害监测等。基于STM32F4和PX4的嵌入式飞控系统,实现了稳定的飞行控制...
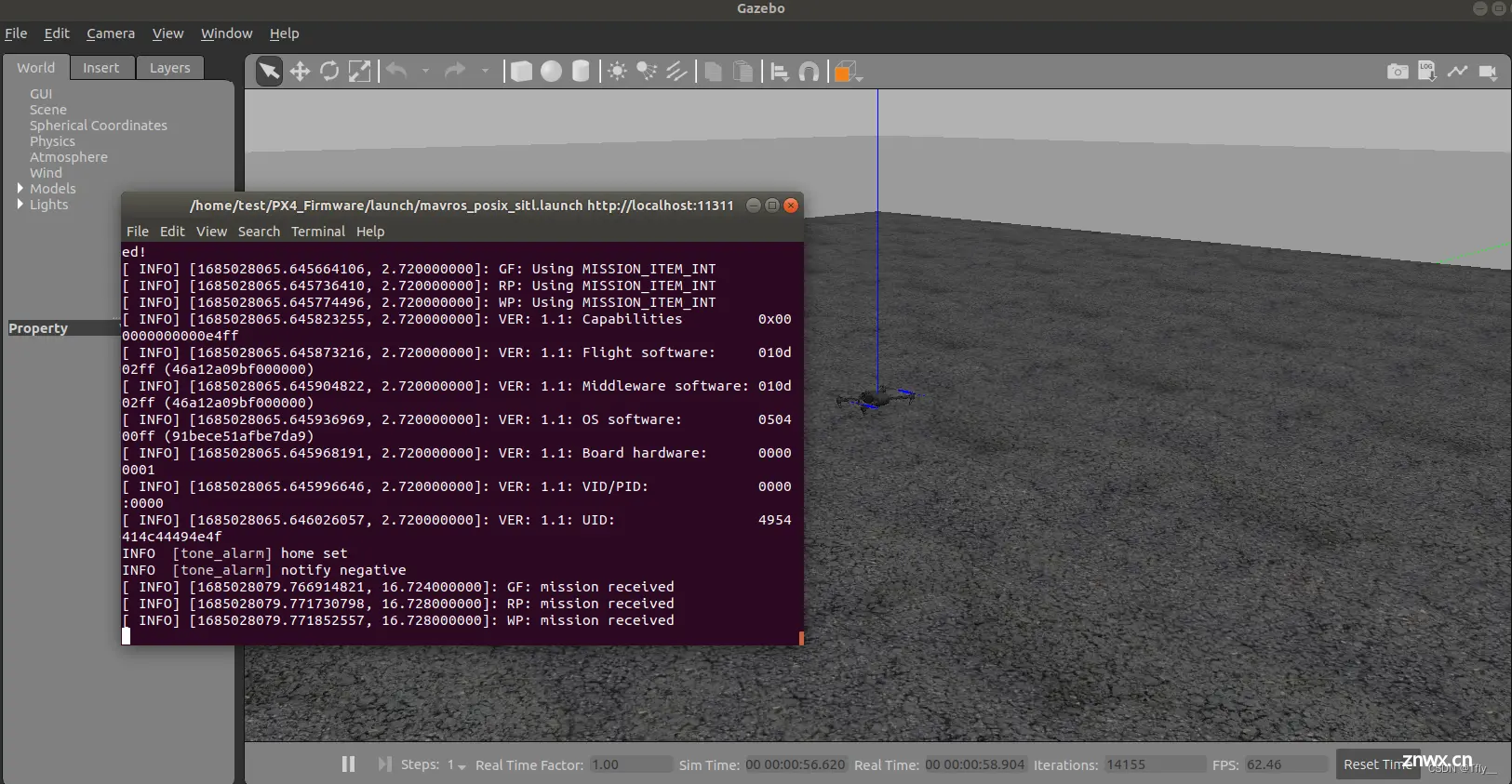
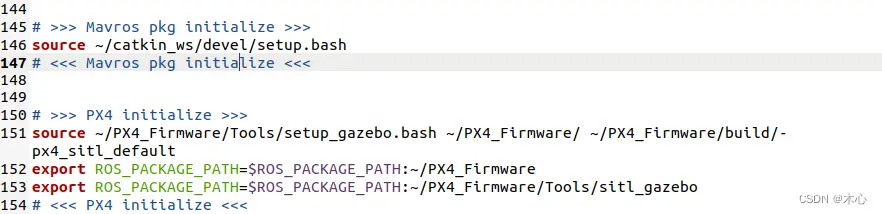
该文详细介绍了如何在Ubuntu18.04上搭建PX4v1.13.2的无人机仿真环境,包括安装ROSMelodic、MAVROS、QGC,以及配置和编译PX4源码,使用gazebo进行仿真测试。过程中涉及依赖安...
写在前面,目前中文互联网上关于`PX4`飞控的学习资料较少,笔者查阅了大量的资料整理成这篇博客,贡献一些学习内容,码字不易,如果帮助到您,请您帮我点点赞。_px41.13版...