全自主巡航无人机项目思路:STM32/PX4 + ROS + AI 实现从传感融合到智能规划的端到端解决方案
极客小张 2024-08-16 17:01:03 阅读 61
1. 项目概述
本项目旨在设计并实现一款高度自主的自动巡航无人机系统。该系统能够按照预设路径自主飞行,完成各种巡航任务,如电力巡线、森林防火、边境巡逻和灾害监测等。
1.1 系统特点
基于STM32F4和PX4的高性能嵌入式飞控系统多传感器融合技术实现精确定位和姿态估计Wi-Fi/4G双模无线通信,支持远程控制和数据传输基于ROS的智能路径规划算法,实现复杂环境下的自主导航模块化设计,易于扩展和维护
1.2 技术栈
嵌入式开发:STM32F4 MCU,PX4飞控系统,C/C++编程语言传感器集成:GPS、IMU(加速度计、陀螺仪、磁力计)、气压计无线通信:Wi-Fi模块(短距离),4G模块(远距离),MAVLink协议路径规划:ROS框架,Python编程语言开发工具:STM32CubeIDE,QGroundControl地面站软件
2. 系统设计
2.1 硬件架构

硬件系统主要由以下模块构成:
飞控主板:采用STM32F4系列MCU,运行PX4飞控系统定位模块:集成GPS模块,提供精确的全球定位信息姿态测量:IMU(惯性测量单元)包含加速度计、陀螺仪和磁力计高度测量:气压计用于测量相对高度和垂直速度通信模块:Wi-Fi模块用于短距离高带宽通信,4G模块用于远距离通信动力系统:电机驱动控制四个无刷电机视觉系统:高清摄像头用于环境感知和目标识别电源系统:锂电池供电,配备电源管理模块
2.2 软件架构
软件系统主要包括以下组件:
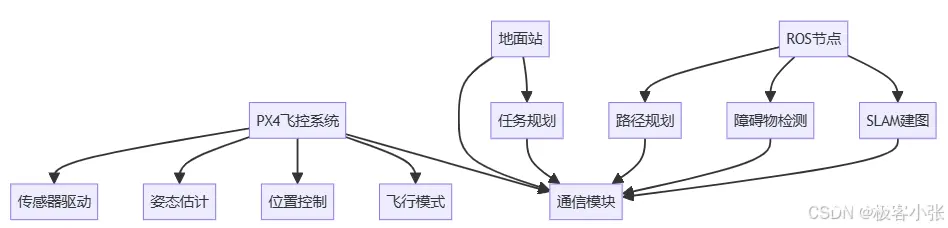
PX4飞控系统:
传感器驱动:负责读取和处理各类传感器数据姿态估计:使用扩展卡尔曼滤波(EKF)融合IMU、GPS等数据位置控制:实现精确的位置保持和轨迹跟踪飞行模式:包括手动、半自动、全自动等多种飞行模式通信模块:基于MAVLink协议与地面站和ROS节点通信
地面站(QGroundControl):
飞行监控:实时显示飞行状态、位置和传感器数据任务规划:设计巡航路径,设置航点和任务参数参数配置:调整PID参数,设置飞行限制等固件更新:支持远程固件升级
ROS(机器人操作系统)节点:
路径规划:使用A*或RRT算法进行全局路径规划障碍物检测:基于视觉或激光雷达数据进行实时障碍物检测SLAM建图:同步定位与地图构建,用于未知环境导航
通信流程:
PX4飞控系统通过MAVLink协议与地面站和ROS节点进行双向通信地面站发送控制指令和任务信息给飞控系统ROS节点将规划的路径、检测到的障碍物信息发送给飞控系统飞控系统实时反馈飞行状态和传感器数据给地面站和ROS节点
这种分层的软件架构设计具有以下优势:
模块化:各个组件功能明确,便于开发和维护灵活性:可以根据需求easily添加或替换功能模块可扩展性:支持添加新的传感器和算法以增强系统能力可靠性:核心飞控功能由成熟的PX4系统保障,提高系统稳定性
3. 核心代码实现
3.1 姿态估计
姿态估计是自动巡航无人机系统的关键模块之一。我们使用四元数表示姿态,并采用互补滤波算法融合加速度计和陀螺仪数据。以下是核心代码实现:
<code>#include <math.h>
// 四元数结构体
typedef struct {
float w, x, y, z;
} Quaternion;
// 姿态估计参数
#define dt 0.01f // 采样周期
#define alpha 0.98f // 互补滤波系数
Quaternion attitude = {1.0f, 0.0f, 0.0f, 0.0f}; // 初始姿态
void attitudeUpdate(float acc[3], float gyro[3]) {
// 归一化加速度
float accMag = sqrt(acc[0]*acc[0] + acc[1]*acc[1] + acc[2]*acc[2]);
float ax = acc[0] / accMag;
float ay = acc[1] / accMag;
float az = acc[2] / accMag;
// 基于加速度计算俯仰角和横滚角
float pitch = atan2(-ax, sqrt(ay*ay + az*az));
float roll = atan2(ay, az);
// 构造基于加速度的四元数
Quaternion qAcc;
qAcc.w = cos(roll/2) * cos(pitch/2);
qAcc.x = cos(roll/2) * sin(pitch/2);
qAcc.y = sin(roll/2) * cos(pitch/2);
qAcc.z = -sin(roll/2) * sin(pitch/2);
// 基于陀螺仪数据的四元数微分方程
float qDot[4];
qDot[0] = 0.5f * (-attitude.x*gyro[0] - attitude.y*gyro[1] - attitude.z*gyro[2]);
qDot[1] = 0.5f * (attitude.w*gyro[0] + attitude.y*gyro[2] - attitude.z*gyro[1]);
qDot[2] = 0.5f * (attitude.w*gyro[1] - attitude.x*gyro[2] + attitude.z*gyro[0]);
qDot[3] = 0.5f * (attitude.w*gyro[2] + attitude.x*gyro[1] - attitude.y*gyro[0]);
// 更新姿态四元数
attitude.w += qDot[0] * dt;
attitude.x += qDot[1] * dt;
attitude.y += qDot[2] * dt;
attitude.z += qDot[3] * dt;
// 互补滤波
attitude.w = alpha * attitude.w + (1-alpha) * qAcc.w;
attitude.x = alpha * attitude.x + (1-alpha) * qAcc.x;
attitude.y = alpha * attitude.y + (1-alpha) * qAcc.y;
attitude.z = alpha * attitude.z + (1-alpha) * qAcc.z;
// 归一化四元数
float mag = sqrt(attitude.w*attitude.w + attitude.x*attitude.x +
attitude.y*attitude.y + attitude.z*attitude.z);
attitude.w /= mag;
attitude.x /= mag;
attitude.y /= mag;
attitude.z /= mag;
}
代码说明:
我们定义了一个Quaternion结构体来表示姿态四元数。attitudeUpdate函数接收加速度计和陀螺仪的原始数据作为输入。首先处理加速度计数据,计算出俯仰角和横滚角,并构造对应的四元数。然后利用陀螺仪数据,通过四元数微分方程更新姿态。使用互补滤波算法融合加速度计和陀螺仪的结果,alpha参数决定了各自的权重。最后对结果四元数进行归一化,确保其表示有效的旋转。
这种方法结合了加速度计的长期稳定性和陀螺仪的短期准确性,能够得到更加精确的姿态估计。
3.2 位置控制
位置控制是实现自动巡航的关键。我们使用PID控制器来实现精确的位置保持和轨迹跟踪。以下是简化的PID控制器实现:
#include <math.h>
typedef struct {
float Kp, Ki, Kd; // PID参数
float integral; // 积分项
float prevError; // 上一次的误差
} PIDController;
// 初始化PID控制器
void initPIDController(PIDController* pid, float Kp, float Ki, float Kd) {
pid->Kp = Kp;
pid->Ki = Ki;
pid->Kd = Kd;
pid->integral = 0.0f;
pid->prevError = 0.0f;
}
// PID控制器更新函数
float updatePID(PIDController* pid, float setpoint, float measurement, float dt) {
float error = setpoint - measurement;
// 比例项
float P = pid->Kp * error;
// 积分项
pid->integral += error * dt;
float I = pid->Ki * pid->integral;
// 微分项
float derivative = (error - pid->prevError) / dt;
float D = pid->Kd * derivative;
// 计算输出
float output = P + I + D;
// 更新上一次误差
pid->prevError = error;
return output;
}
// 位置控制主函数
void positionControl(float targetPosition[3], float currentPosition[3], float* outputs) {
static PIDController pidX, pidY, pidZ;
// 初始化PID控制器(仅在第一次调用时执行)
static int initialized = 0;
if (!initialized) {
initPIDController(&pidX, 1.0f, 0.1f, 0.05f); // 示例PID参数
initPIDController(&pidY, 1.0f, 0.1f, 0.05f);
initPIDController(&pidZ, 1.5f, 0.15f, 0.1f); // 垂直方向通常需要更强的控制
initialized = 1;
}
// 更新每个轴的PID控制器
float dt = 0.01f; // 假设控制周期为10ms
outputs[0] = updatePID(&pidX, targetPosition[0], currentPosition[0], dt);
outputs[1] = updatePID(&pidY, targetPosition[1], currentPosition[1], dt);
outputs[2] = updatePID(&pidZ, targetPosition[2], currentPosition[2], dt);
}
代码说明:
PIDController结构体包含PID控制器的参数和状态。initPIDController函数用于初始化PID控制器的参数。updatePID函数实现了PID控制算法的核心逻辑,包括比例、积分和微分三个部分。positionControl函数是位置控制的主函数,它为X、Y、Z三个轴分别创建和更新PID控制器。控制器的输出可以直接用作无人机的速度或加速度指令,具体取决于飞控系统的接口设计。
这个简化的PID控制器为每个轴独立控制,在实际应用中可能需要考虑轴间耦合和更复杂的动力学模型。
3.3 路径规划
路径规划模块使用ROS(机器人操作系统)和Python实现。我们采用A*算法进行全局路径规划。以下是简化的实现:
import rospy
from geometry_msgs.msg import PoseStamped
from nav_msgs.msg import OccupancyGrid, Path
import numpy as np
class AStarPlanner:
def __init__(self):
self.map = None
self.start = None
self.goal = None
self.path = []
# ROS节点初始化
rospy.init_node('astar_planner')
self.map_sub = rospy.Subscriber('/map', OccupancyGrid, self.map_callback)
self.start_sub = rospy.Subscriber('/start_pose', PoseStamped, self.start_callback)
self.goal_sub = rospy.Subscriber('/goal_pose', PoseStamped, self.goal_callback)
self.path_pub = rospy.Publisher('/path', Path, queue_size=1)
def map_callback(self, msg):
self.map = np.array(msg.data).reshape((msg.info.height, msg.info.width))
def start_callback(self, msg):
self.start = (int(msg.pose.position.x), int(msg.pose.position.y))
self.plan()
def goal_callback(self, msg):
self.goal = (int(msg.pose.position.x), int(msg.pose.position.y))
self.plan()
def heuristic(self, a, b):
return np.sqrt((b[0] - a[0]) ** 2 + (b[1] - a[1]) ** 2)
def get_neighbors(self, node):
directions = [(0,1),(0,-1),(1,0),(-1,0),(1,1),(1,-1),(-1,1),(-1,-1)]
neighbors = []
for direction in directions:
neighbor = (node[0] + direction[0], node[1] + direction[1])
if 0 <= neighbor[0] < self.map.shape[0] and 0 <= neighbor[1] < self.map.shape[1]:
if self.map[neighbor] == 0: # 假设0表示自由空间
neighbors.append(neighbor)
return neighbors
def astar(self):
open_set = set([self.start])
closed_set = set()
came_from = {}
g_score = {self.start: 0}
f_score = {self.start: self.heuristic(self.start, self.goal)}
while open_set:
current = min(open_set, key=lambda x: f_score[x])
if current == self.goal:
path = []
while current in came_from:
path.append(current)
current = came_from[current]
path.append(self.start)
return path[::-1]
open_set.remove(current)
closed_set.add(current)
for neighbor in self.get_neighbors(current):
if neighbor in closed_set:
continue
tentative_g_score = g_score[current] + self.heuristic(current, neighbor)
if neighbor not in open_set:
open_set.add(neighbor)
elif tentative_g_score >= g_score[neighbor]:
continue
came_from[neighbor] = current
g_score[neighbor] = tentative_g_score
f_score[neighbor] = g_score[neighbor] + self.heuristic(neighbor, self.goal)
return None # 没有找到路径
def plan(self):
if self.map is not None and self.start is not None and self.goal is not None:
self.path = self.astar()
if self.path:
# 发布路径消息
path_msg = Path()
path_msg.header.frame_id = "map"
path_msg.header.stamp = rospy.Time.now()
for point in self.path:
pose = PoseStamped()
pose.pose.position.x = point[0]
pose.pose.position.y = point[1]
path_msg.poses.append(pose)
self.path_pub.publish(path_msg)
else:
rospy.logwarn("No path found")
if __name__ == '__main__':
planner = AStarPlanner()
rospy.spin()
代码说明:
AStarPlanner类实现了A*路径规划算法。
使用ROS的订阅者接收地图、起点和终点信息:
/map: 接收占用栅格地图/start_pose: 接收起点位置/goal_pose: 接收终点位置
map_callback, start_callback, goal_callback 函数处理接收到的数据。
heuristic函数计算两点间的欧几里得距离,作为A*算法的启发函数。
get_neighbors函数返回给定节点的有效邻居节点。
astar函数实现了A*算法的核心逻辑:
使用open_set和closed_set来管理待探索和已探索的节点f_score = g_score + heuristic,用于选择最优节点当找到目标节点时,通过came_from字典回溯构建路径如果无法找到路径,返回None
plan函数是路径规划的主函数:
检查是否已接收到必要的信息(地图、起点、终点)调用astar函数进行路径规划如果找到路径,将其转换为ROS的Path消息并发布
在主函数中,我们创建AStarPlanner实例并使用rospy.spin()保持节点运行。
个路径规划模块的主要特点:
使用ROS框架,便于与其他ROS节点(如定位、控制模块)集成实现了A*算法,能够在给定的栅格地图上找到最优路径考虑了障碍物避免,只在自由空间中规划路径支持实时规划,当接收到新的起点或终点时会重新规划将规划结果以标准的ROS Path消息格式发布,便于其他模块使用
在实际应用中,这个基础实现可以进一步优化:
添加路径平滑处理,使路径更适合无人机飞行实现动态避障,考虑移动障碍物优化A*算法,如使用Jump Point Search等变体提高效率添加局部路径规划,以应对地图变化或未知障碍物
4. 项目总结
本自动巡航无人机系统集成了多项关键技术:
基于STM32F4和PX4的嵌入式飞控系统,实现了稳定的飞行控制多传感器融合的姿态估计算法,提高了飞行姿态的精确度PID控制器实现的位置控制,确保了精确的路径跟踪基于ROS的A*路径规划算法,实现了智能化的任务规划
通过这些模块的协同工作,系统能够完成复杂环境下的自主巡航任务。
上一篇: RAG+AI工作流+Agent:LLM框架该如何选择,全面对比MaxKB、Dify、FastGPT、RagFlow、Anything-LLM,以及更多推荐
下一篇: Datawhale AI夏令营第四期 Task1 :从零入门AI生图原理&实践
本文标签
声明
本文内容仅代表作者观点,或转载于其他网站,本站不以此文作为商业用途
如有涉及侵权,请联系本站进行删除
转载本站原创文章,请注明来源及作者。