各位小伙伴们大家好,本篇博客开一个新的系列,自动驾驶控制算法。内容整理自B站知名up主忠厚老实的老王的视频,作为博主的学习笔记,分享给大家共同学习。自动驾驶是比较新、也比较火的技术,这个系列介绍自动驾驶...
在使用OpenBroadcasterSoftware(OBS)开发过程中,对媒体源进行有效控制是实现高质量直播和录制的关键。媒体控制功能,如播放、暂停和重启,都依赖于OBS的核心机制。本文通过深入分析函数的实现细节,揭示了确...
WebLogic管理控制台中常用超时配置的分析与说明_weblogic设置请求超时时间...

进程创建:fork初识、返回值写时拷贝、常规用法、调用失败原因;进程终止:进程退出场景、进程退出码、进程正常退出、return退出、exit、_exit、return、exit和_exit之间的区别与联系、进程异常...

第四届机电一体化、自动化与智能控制国际学术会议(MAIC2024)将于2024年9月27-29日在中国成都召开。MAIC2024将围绕“机电一体化技术”、“自动化与智能控制技术”领域最新的研究热点、核心技术...
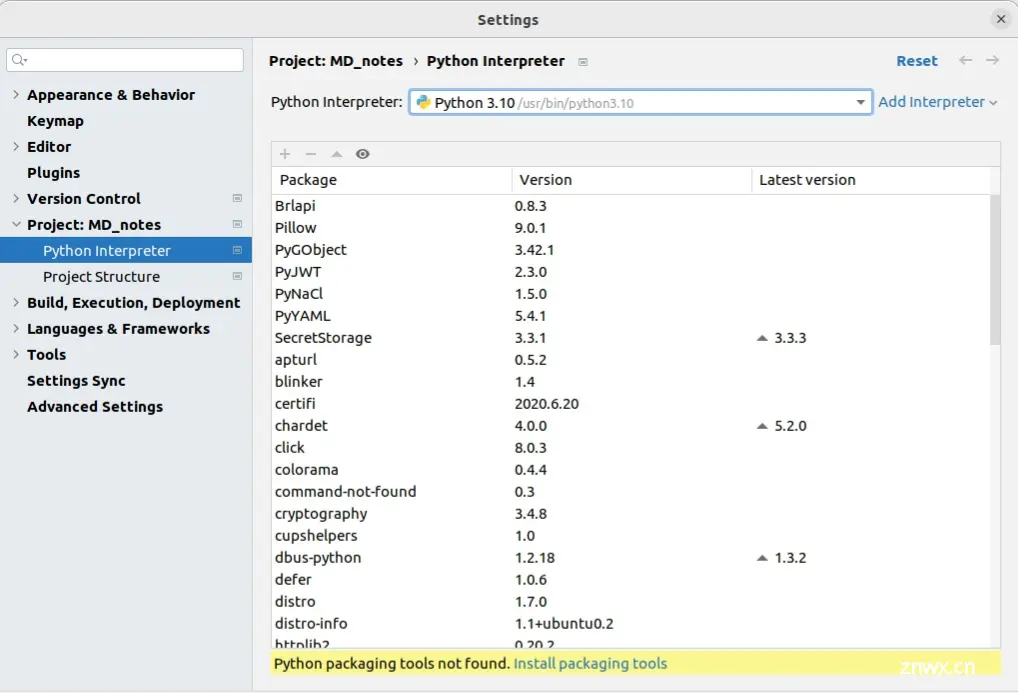
@目录1.查看目前python的版本2.添加软件源并更新3.选择你想要下载的版本4.警示:没必要设置默认版本误区千万千万不要覆盖python3软链接解决办法5.pip软件包管理最省心稍微麻烦换源网上有很多教程都是教导小白去官方下载之后编译安装。但是,小白连c...
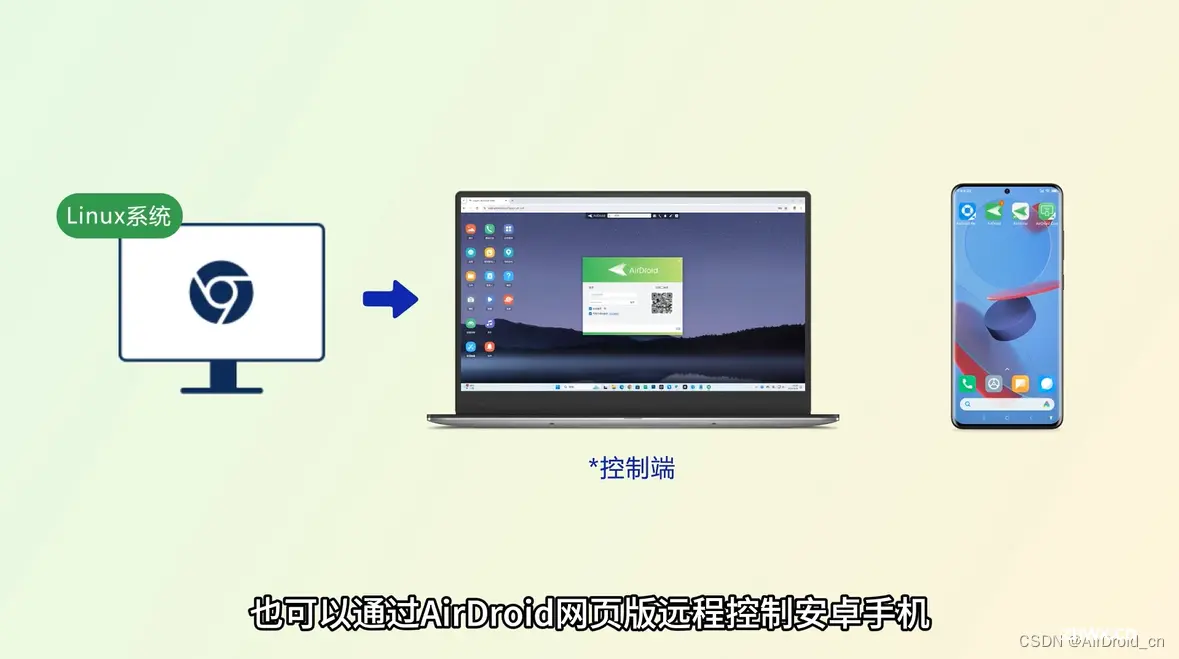
只要是安卓7.0及以上版本的手机,都可以使用的远程控制功能。如果你的电脑是Windows,macOS系统,可以安装客户端或使用网页版。如果你的电脑是Linux系统,也可以通过AirDroid网页版远程控制安卓手机。...

Nginx限流功能详解_nginx限流...
2023年电赛E题全国二等奖,核心代码思路分享(STM32F103RCT6+OPENMV)_2023电赛...

classnames工具在React开发中极为实用,通过简洁的方式实现动态类名管理。本文详细介绍了classnames的基础用法和高级应用,包括如何通过对象、数组及其组合来动态添加类名,结合CSS模块和条件渲染实现灵活...