《DNK210使用指南 -CanMV版 V1.0》第二十一章 machine.UART类实验
cnblogs 2024-09-02 15:45:01 阅读 94
第二十一章 machine.UART类实验
1)实验平台:正点原子DNK210开发板
2)章节摘自【正点原子】DNK210使用指南 - CanMV版 V1.0
3)购买链接:https://detail.tmall.com/item.htm?&id=782801398750
4)全套实验源码+手册+视频下载地址:http://www.openedv.com/docs/boards/k210/ATK-DNK210.html
5)正点原子官方B站:https://space.bilibili.com/394620890
6)正点原子K210技术交流企鹅群:605557868


本章将介绍machine模块中的UART类。通过本章的学习,读者将学习到machine模块中UART类的使用。
本章分为如下几个小节:
21.1 machine.UART类介绍
21.2 硬件设计
21.3 程序设计
21.4 运行验证
21.1 machine.UART类介绍
machine.UART类是machine模块内提供的类,该类用于访问和控制Kendryte K210硬件上的UART和UARTHS控制器。Kendryte K210硬件上有3个UART控制器和1个UARTHS控制器,它们能够灵活地与外部设备进行全双工数据交换。
UART一共有3个,其特点如下所示:
可编程收发波特率
3个UART的发送FIFO以及接收FIFO共享1024*8bit RAM全双工异步通信
支持输出信号波特率自动检测功能
支持5、6、7、8位数据长度
支持1、1.5、2、3、4位停止位长度
支持奇偶校验位
支持RS485协议
支持IrDA协议
支持DMA高速数据通信
支持UART唤醒模式
支持软件流控和硬件流控
UARTHS一共有1个,其特点如下所示:
通讯速率可达5Mbps
8字节接收和发送FIFO
可编程中断模式
不支持硬件流控或者其他调制解调控制信号,或异步串行数据转换器
machine.UART提供了UART构造函数,用于创建一个UART对象,UART构造函数如下所示:
<code>class UART(id, baudrate=115200, bitwidth=8, parity=None, stop=None, timeout=1000, timeout_char=10,
read_buf_len=2048, ide=False, from_ide=True)
通过UART构造函数可以通过指定参数创建并初始化一个UART对象。
id指的是UART编号,可以是UART.UART1~UART.UART3和UART.UARTHS,分别对应了Kendryte K210硬件上的UART1~UART3和UARTHS。
baudrate指的是UART通信的波特率。
bitwidth指的是UART数据宽度,可以是5、6、7、8位。
parity指的是UART校验位,可以是None、UART. PARITY_ODD和UART. PARITY_EVEN,分别对应无校验位、奇校验和偶校验。
stop指的是UART停止位,可以是1、1.5、2位。
timeout指的是UART接收超时时间。
timeout_char指的是UART作为数据流被读取时,等待一个字节的最长超时时间。
read_buf_len指的是UART接收缓冲区的长度,UART通过中断来接收数据,如果缓冲区满了,则将自动停止数据接收。
ide和from_ide这两个参数,在大多数情况下是在与CanMV IDE软件连接时才使用到的。
UART构造函数的使用示例如下所示:
from board import board_info
from fpioa_manager import fm
from machine import UART
fm.register(board_info.EX_UART1_TX, fm.fpioa.UART1_TX)
fm.register(board_info.EX_UART1_RX, fm.fpioa.UART1_RX)
uart1 = UART(UART.UART1, 115200)
machine.UART类为UART对象提供了any()方法,用于获取UART对象的接收缓冲区已有的数据量,any()方法如下所示:
UART.any()
any()方法用于获取UART对象接收缓冲区中已有的数据量,当UART对象还没有接收到数据,或接收到的数据均已被读出,则any()方法将返回0。
any()方法的使用示例如下所示:
from board import board_info
from fpioa_manager import fm
from machine import UART
fm.register(board_info.EX_UART1_TX, fm.fpioa.UART1_TX)
fm.register(board_info.EX_UART1_RX, fm.fpioa.UART1_RX)
uart1 = UART(UART.UART1, 115200)
while True:
if uart1.any() != 0:
print("Data received!")
machine.UART类为UART对象提供了readchar ()方法,用于从UART对象的接收缓冲区中读取一个字节数据,readchar()方法如下所示:
UART.readchar()
readchar()方法用于读取UART对象的接收缓冲区中的一个数据,若UART对象的接收缓冲区中没有可用的数据,则readchar()方法将返回-1。
readchar()方法的使用示例如下所示:
from board import board_info
from fpioa_manager import fm
from machine import UART
fm.register(board_info.EX_UART1_TX, fm.fpioa.UART1_TX)
fm.register(board_info.EX_UART1_RX, fm.fpioa.UART1_RX)
uart1 = UART(UART.UART1, 115200)
while True:
data = uart1.readchar()
if data != -1:
print(data, end='')code>
machine.UART类为UART对象提供了read()方法,用于从UART对象的接收缓冲区中读取数据,read()方法如下所示:
UART.read(num)
read()方法用于从UART对象的接收缓冲区中读取数据。
num指的是读取数据的字节数,一般情况下可以填入UART对象接收缓冲区的大小,如果接收缓冲区的有效数据没有那么多,read()方法将只返回有效的数据。
read()方法的使用示例如下所示:
from board import board_info
from fpioa_manager import fm
from machine import UART
fm.register(board_info.EX_UART1_TX, fm.fpioa.UART1_TX)
fm.register(board_info.EX_UART1_RX, fm.fpioa.UART1_RX)
uart1 = UART(UART.UART1, 115200)
print(uart1.read(2048))
machine.UART类为UART对象提供了readline()方法,用于从UART对象的接收缓冲区中读取以行为单位的数据,readline()方法如下所示:
UART.readline(num)
readline()方法用于从UART对象的接收缓冲区中读取以行为单位的数据,readline()方法会以“\n”字符作为行与行之间的分隔。
num指的是要读取的行数。
readline()方法的使用示例如下所示:
from board import board_info
from fpioa_manager import fm
from machine import UART
fm.register(board_info.EX_UART1_TX, fm.fpioa.UART1_TX)
fm.register(board_info.EX_UART1_RX, fm.fpioa.UART1_RX)
uart1 = UART(UART.UART1, 115200)
print(uart1.readline(1))
machine.UART类为UART对象提供了write()方法,用于使用UART对象发送数据,write()方法如下所示:
UART.write(buf)
write()方法用于使用UART对象通过UART发送数据。
buf指的是待发送的数据。
write()方法的使用示例如下所示:
from board import board_info
from fpioa_manager import fm
from machine import UART
fm.register(board_info.EX_UART1_TX, fm.fpioa.UART1_TX)
fm.register(board_info.EX_UART1_RX, fm.fpioa.UART1_RX)
uart1 = UART(UART.UART1, 115200)
uart1.write("Hello, World!")
21.2 硬件设计
21.2.1 例程功能
创建两个UART对象,两个UART对象除了UART编号使用相同的配置参数。
当KEY0按键被按下后,使用UART1往UART2发送数据,并将UART2接收到的数据通过print()打印输出。
当KEY1按键被按下后,使用UATY2往UART1发送数据,并将UART1接收到的数据通过printf()打印输出。
21.2.2 硬件资源
扩展串口接口1
UART1_TXD - IO7
UART1_RXD - IO9
扩展串口接口2
UART2_TXD - IO6
UART2_RXD - IO8
21.2.3 原理图
本章实验内容,需要使用到板载的扩展串口接口1和扩展串口接口2,正点原子DNK210开发板上的扩展串口接口连接原理图,如下图所示:
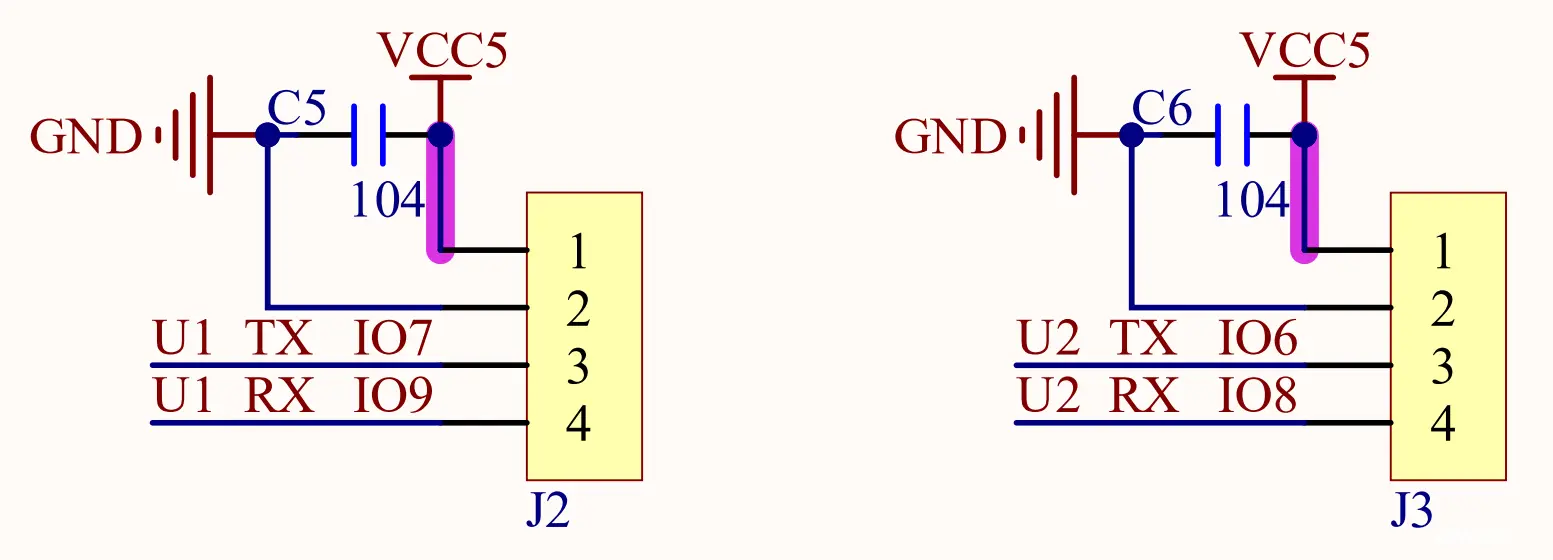
图21.2.3.1 扩展串口接口连接原理图
由于需要让这两个串口扩展接口相互通信,因此需要使用杜邦线或其他线材从物理上连接这这两个接口,连接时需要注意串口线路的连接需要将TXD信号和RXD信号交叉连接。
21.3 程序设计
21.3.1 machine.UART类
有关machine.UART类的介绍,请见第21.1小节《machine.UART类介绍》。
21.3.2 程序流程图
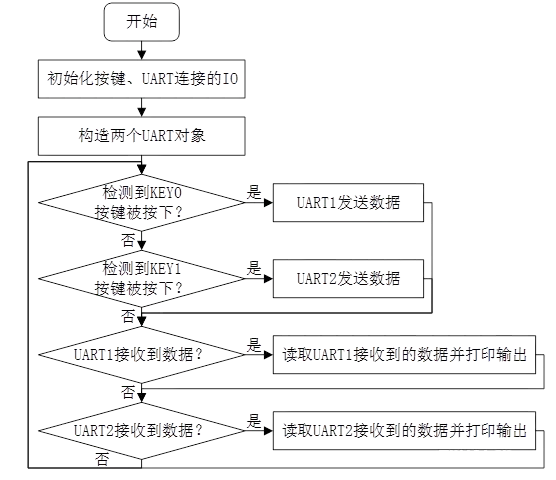
图21.3.2.1 machine.UART类实验流程图
21.3.3 main.py代码
main.py中的脚本代码如下所示:
<code>from board import board_info
from fpioa_manager import fm
from maix import GPIO
import time
from machine import UART
fm.register(board_info.KEY0, fm.fpioa.GPIOHS0)
fm.register(board_info.KEY1, fm.fpioa.GPIOHS1)
key0 = GPIO(GPIO.GPIOHS0, GPIO.IN, GPIO.PULL_UP)
key1 = GPIO(GPIO.GPIOHS1, GPIO.IN, GPIO.PULL_UP)
fm.register(board_info.EX_UART1_TX, fm.fpioa.UART1_TX)
fm.register(board_info.EX_UART1_RX, fm.fpioa.UART1_RX)
fm.register(board_info.EX_UART2_TX, fm.fpioa.UART2_TX)
fm.register(board_info.EX_UART2_RX, fm.fpioa.UART2_RX)
# 构造UART对象
uart1 = UART(UART.UART1, 115200)
uart2 = UART(UART.UART2, 115200)
while True:
if key0.value() == 0:
time.sleep_ms(20)
if key0.value() == 0:
# UART发送数据
uart1.write("From UART1!")
while key0.value() == 0:
pass
elif key1.value() == 0:
time.sleep_ms(20)
if key1.value() == 0:
# UART发送数据
uart2.write("From UART2!")
while key1.value() == 0:
pass
if uart1.any() != 0:
# UART接收数据
data = uart1.read()
print("UART1 get data:", data.decode())
if uart2.any() != 0:
# UART接收数据
data = uart2.read()
print("UART2 get data:", data.decode())
可以看到首先就是构造了两个UART对象,并且配置了相同的通信波特率。
接着便在一个循环中读取按键状态和两个UART的数据接收状态,如果KEY0按键被按下,则通过UART1对象发送“From UART1!”的数据,如果KEY1按键被按下,则通过UART2对象发送“From UART2!”的数据,如果UART1对象或UART2对象接收到数据,并将接收到的数据加上UART对象编号后通过print()打印输出。
由于本章实验要求板载的两个扩展串口接口通过线材进行连接,因此当KEY0按键被按下后,UART1对象发出的数据将被UART2对象接收,并会被通过print()打印输出,当KEY1按键被按下后,UART2对象发出的数据将被UART1对象接收,并会通过print()打印输出。
21.4 运行验证
将DNK210开发板连接CanMV IDE,并点击CanMV IDE上的“开始(运行脚本)”按钮后,同时将板载的两个扩展串口接口通过线材按照要求进行相互连接。
此时,若分别按下KEY0按键和KEY1按键,CanMV IDE软件的“串行中断”将依次输出UART2对象和UART1对象接收到的数据,如下图所示:
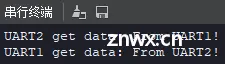
图21.4.1 “串行终端”窗口打印输出
可以看到,首先UART2对象接收到了来自UART1对象发送的数据,然后UART1对象接收到了来自UART2发送的数据,这与理论推断的结果一致。
声明
本文内容仅代表作者观点,或转载于其他网站,本站不以此文作为商业用途
如有涉及侵权,请联系本站进行删除
转载本站原创文章,请注明来源及作者。