2024数学建模国赛A题详细思路:基于空间几何运动学和优化模型matlab求解
nancheng_single 2024-10-02 13:05:02 阅读 68
2024数学建模国赛A题“板凳龙”闹元宵
2024高教社杯数学建模竞赛A题B题C题D题E题完整成品文章和全部问题的解题代码完整版本更新如下:https://www.yuque.com/u42168770/qv6z0d/rytbc1nelty1mu4o
<code>% 定义常量
L_head = 3.41; % 龙头长度(米)
L_body = 2.20; % 龙身长度(米)
spiral_pitch = 0.55; % 螺距(米)
a = spiral_pitch / (2 * pi); % 螺线参数
v_head = 1; % 龙头速度(米/秒)
total_time = 300; % 总时间(秒)
dt = 1; % 时间步长(秒)
n_segments = 223; % 板凳总数
% 初始化数组
t = 0:dt:total_time;
theta = zeros(size(t));
x = zeros(n_segments, length(t));
y = zeros(n_segments, length(t));
vx = zeros(n_segments, length(t));
vy = zeros(n_segments, length(t));
% 计算初始theta(第16圈)
theta(1) = 16 * 2 * pi;
% 主循环(略,见完整版本)
for i = 2:length(t)
% 计算新的theta
% 计算龙头位置
% 计算龙头速度
% 计算龙身和龙尾位置和速度
for j = 2:n_segments
% 计算方向向量
% 计算新位置
% 计算速度
end
end
% 打印关键变量
disp('龙头初始位置:');
fprintf('x = %.6f, y = %.6f\n', x(1,1), y(1,1));
disp('龙头最终位置:');
fprintf('x = %.6f, y = %.6f\n', x(1,end), y(1,end));
% 保存结果到Excel文件
result = zeros(n_segments * 2, length(t));
for i = 1:n_segments
result(2*i-1, :) = x(i, :);
result(2*i, :) = y(i, :);
end
writematrix(result', '问题1_result1.xlsx');
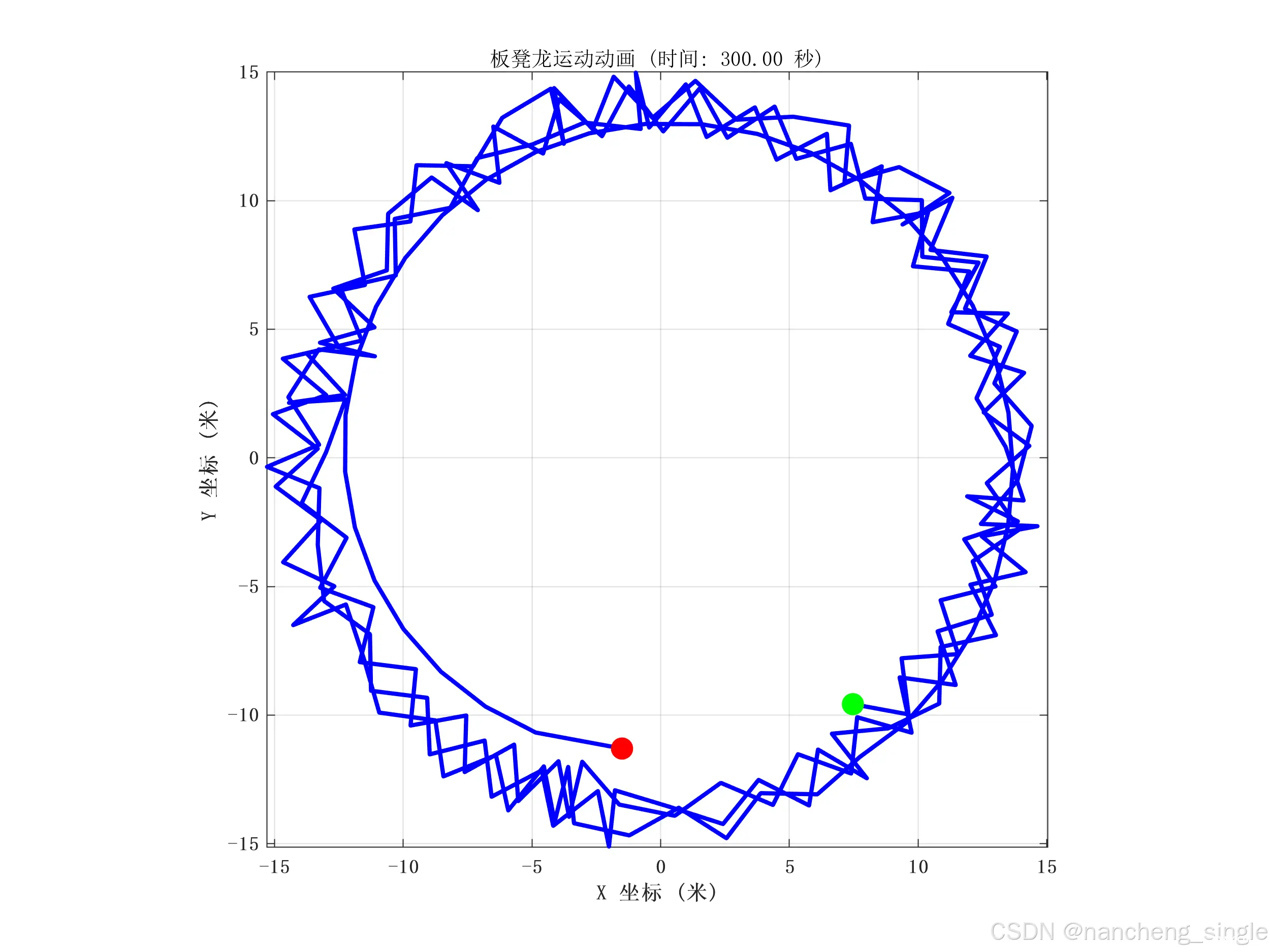
% 绘制运动轨迹图
figure('Position', [100, 100, 800, 600]);
plot(x(1,:), y(1,:), 'r-', 'LineWidth', 2);
hold on;
plot(x(end,:), y(end,:), 'b-', 'LineWidth', 2);
plot(x(:,end), y(:,end), 'g-', 'LineWidth', 2);
title('板凳龙运动轨迹');
xlabel('X 坐标 (米)');
ylabel('Y 坐标 (米)');
legend('龙头轨迹', '龙尾轨迹', '最终位置');
grid on;
“板凳龙”,又称“盘龙”,是浙闽地区的传统地方民俗文化活动。人们将少则几十条, 多则上百条的板凳首尾相连,形成蜿蜒曲折的板凳龙。盘龙时,龙头在前领头,龙身和龙尾 相随盘旋,整体呈圆盘状。一般来说,在舞龙队能够自如地盘入和盘出的前提下,盘龙所需 要的面积越小、行进速度越快,则观赏性越好。
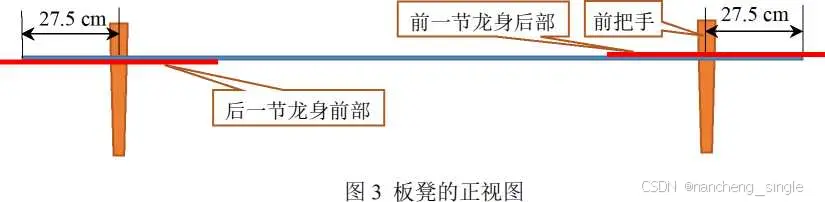
某板凳龙由223节板凳组成,其中第1节为龙头,后面221节为龙身,最后1节为龙 尾。龙头的板长为341 cm,龙身和龙尾的板长均为220 cm,所有板凳的板宽均为30 cm。每 节板凳上均有两个孔,孔径(孔的直径)为5.5 cm,孔的中心距离最近的板头27.5 cm (见 图1和图2)。相邻两条板凳通过把手连接(见图3)。

请建立数学模型,解决以下问题:
问题1舞龙队沿螺距为55 cm的等距螺线顺时针盘入,各把手中心均位于螺线上。龙 头前把手的行进速度始终保持1 m/s。初始时,龙头位于螺线第16圈A点处(见图4)。请 给出从初始时刻到300 s为止,每秒整个舞龙队的位置和速度(指龙头、龙身和龙尾各前把 手及龙尾后把手中心的位置和速度,下同),将结果保存到文件resultl.xlsx中(模板文件见 附件,其中“龙尾(后)”表示龙尾后把手,其余的均是前把手,结果保留6位小数,下同)。 同时在论文中给出0 s、60 s、120 s、180 s、240 s、300 s时,龙头前把手、龙头后面第1、 51、101、151、201节龙身前把手和龙尾后把手的位置和速度(格式见表1和表2)。
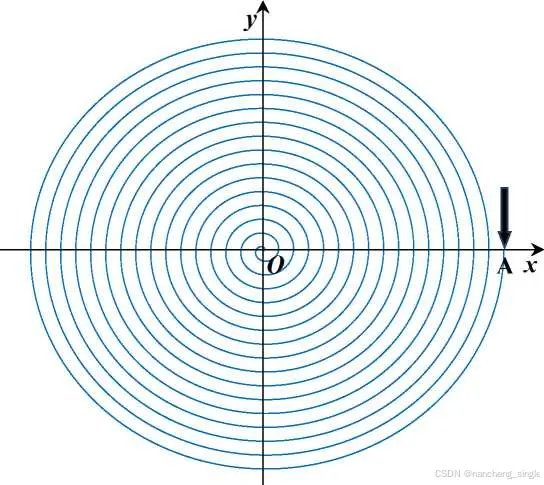
图4盘入螺线示意图
问题2 舞龙队沿问题1设定的螺线盘入,请确定舞龙队盘入的终止时刻,使得板凳之 间不发生碰撞(即舞龙队不能再继续盘入的时间),并给出此时舞龙队的位置和速度,将结 果存放到文件result2.xlsx中(模板文件见附件)。同时在论文中给出此时龙头前把手、龙头 后面第1、51、101、151、201条龙身前把手和龙尾后把手的位置和速度。
问题3 从盘入到盘出,舞龙队将由顺时针盘入调头切换为逆时针盘出,这需要一定的 调头空间。若调头空间是以螺线中心为圆心、直径为9 m的圆形区域(见图5),请确定最 小螺距,使得龙头前把手能够沿着相应的螺线盘入到调头空间的边界。
问题4盘入螺线的螺距为1.7 m,盘出螺线与盘入螺线关于螺线中心呈中心对称,舞 龙队在问题3设定的调头空间内完成调头,调头路径是由两段圆弧相切连接而成的S形曲 线,前一段圆弧的半径是后一段的2倍,它与盘入、盘出螺线均相切。能否调整圆弧,仍保 持各部分相切,使得调头曲线变短?
龙头前把手的行进速度始终保持1 m/s。以调头开始时间为零时刻,给出从-100 s开始 到100 s为止,每秒舞龙队的位置和速度,将结果存放到文件result4.xlsx中(模板文件见附 件)。同时在论文中给出-100 s、-50 s、0 s、50 s、100 s时,龙头前把手、龙头后面第1、 51、101、151、201节龙身前把手和龙尾后把手的位置和速度。
问题5 舞龙队沿问题4设定的路径行进,龙头行进速度保持不变,请确定龙头的最大 行进速度,使得舞龙队各把手的速度均不超过2 m/s。
问题分析
这道题目以"板凳龙"这一传统民俗活动为背景,围绕舞龙队的运动轨迹和速度进行建模分析。题目涉及空间几何、运动学和优化等多个方面,要求参赛者建立数学模型来解决一系列与舞龙队运动相关的问题。整体来看,题目由浅入深,逐步增加难度和复杂度,考察参赛者的建模能力、数学分析能力和问题解决能力。
问题1的分析: 第一问要求建立模型计算舞龙队在螺线上运动时的位置和速度。这个问题主要涉及空间曲线上的运动分析。首先需要建立螺线的参数方程,然后根据龙头的运动速度和初始位置,推导出龙头在不同时刻的位置。接下来,考虑到板凳之间的连接关系,可以通过龙头的位置逐步计算出龙身和龙尾各部分的位置。速度的计算可以通过位置对时间的导数得到。
这个问题的关键在于准确描述螺线和板凳龙的几何关系。可能使用的模型包括参数方程模型和运动学模型。在算法方面,可以考虑使用数值方法,如欧拉法或龙格-库塔法来求解运动方程。同时,由于需要计算大量数据点,编程实现时需要注意计算效率。
问题2的分析: 第二问要求确定舞龙队盘入的终止时刻,这涉及到碰撞检测的问题。首先需要定义板凳之间的碰撞条件,可能需要考虑板凳的长度、宽度以及相邻板凳之间的连接方式。然后,基于问题1的模型,逐步增加时间,计算每个时刻板凳的位置,并检查是否满足碰撞条件。
这个问题可能需要使用几何模型来描述板凳之间的空间关系,并结合运动学模型来分析板凳的位置变化。在算法方面,可以考虑使用二分法或者逐步逼近的方法来寻找临界时刻。同时,由于涉及到大量的碰撞检测计算,可能需要使用空间分割或者包围盒等技术来提高计算效率。
问题3的分析: 第三问要求确定最小螺距,使龙头能够盘入到调头空间边界。这是一个优化问题,需要在满足约束条件的前提下最小化螺距。首先需要建立螺距与螺线曲线之间的关系模型,然后考虑龙头前把手能够到达调头空间边界的条件。
这个问题可能需要使用优化模型,如线性规划或非线性规划。同时,由于螺线的特性,可能需要结合微分几何的知识来分析螺线的性质。在求解算法方面,可以考虑使用梯度下降法、牛顿法等优化算法,或者采用启发式算法如遗传算法、模拟退火算法等来搜索最优解。此外,还需要注意问题的边界条件和约束条件的处理。
问题一模型的建立与求解
思路分析
问题一要求我们建立数学模型来描述舞龙队在螺线上盘入时的运动状态,包括位置和速度。这个问题涉及到空间几何和运动学的知识,需要我们深入分析板凳龙的结构特征和运动特性。首先,我们需要建立一个合适的坐标系统来描述板凳龙的运动。考虑到螺线的特性,使用极坐标系是一个自然的选择。在这个坐标系中,我们可以用极径和极角来表示板凳龙上每个点的位置。其次,我们需要仔细分析板凳龙的结构。板凳龙由223节板凳组成,包括龙头、龙身和龙尾,每节板凳的长度和宽度都是已知的。板凳之间通过把手连接,这些把手的位置将成为我们计算的关键点。再次,我们需要考虑板凳龙的运动特性。题目给出了龙头前把手的行进速度和初始位置,这为我们建立运动方程提供了重要的边界条件。最后,我们需要考虑如何将板凳龙的运动与螺线的几何特性结合起来。螺线的螺距是已知的,这将帮助我们建立螺线的参数方程。
空间螺线运动学模型建立
基于上述思路分析,我们提出一种空间螺线运动学模型来描述板凳龙的运动。这个模型的核心思想是将板凳龙的运动分解为两个部分:沿螺线的切向运动和法向运动。我们首先建立螺线的参数方程,然后利用龙头前把手的运动作为基准,推导出整个板凳龙的运动方程。在这个模型中,我们将板凳龙简化为一系列连续的点,每个点代表一个把手的中心。这样的简化使我们能够更容易地处理板凳龙的运动,同时保留了问题的本质特征。
我们的模型考虑了以下几个关键因素:首先,螺线的几何特性,包括螺距和初始位置。其次,板凳龙的结构特征,包括每节板凳的长度和把手之间的距离。再次,龙头前把手的运动特性,包括初始位置和恒定的行进速度。最后,板凳龙各部分之间的相对运动关系,即后面的板凳如何跟随前面的板凳运动。
这个模型的优势在于它能够准确地描述板凳龙在螺线上的复杂运动,同时保持了计算的可行性。通过将连续的运动离散化为每秒的状态,我们可以使用数值方法来求解这个模型,从而得到板凳龙在不同时刻的位置和速度。
递推迭代算法步骤
为了求解我们建立的空间螺线运动学模型,我们提出一种递推迭代算法。这个算法的核心思想是从龙头开始,逐步计算每个把手的位置和速度,然后向后推进到下一个时间点。算法的具体步骤如下:
首先,我们初始化系统,设定坐标原点、初始时间和龙头前把手的初始位置。然后,我们进入主循环,对每个时间点进行计算。在每个时间点,我们首先计算龙头前把手的新位置和速度。这可以通过螺线的参数方程和龙头的恒定速度来实现。接下来,我们计算龙头后把手的位置和速度。这需要考虑龙头的长度和方向。然后,我们进入一个内循环,逐个计算龙身每个把手的位置和速度。这个计算基于前一个把手的位置和板凳的长度。最后,我们计算龙尾后把手的位置和速度。
在每一步计算中,我们都需要确保相邻把手之间的距离保持不变,这反映了板凳龙的刚性结构。我们使用向量运算来处理这个约束,确保每个板凳都沿着正确的方向运动。同时,我们需要注意处理可能出现的特殊情况,比如当板凳龙接近螺线中心时可能出现的奇异点。
这个算法的一个关键特点是它的递推性质。每个时间点的状态都是基于前一个时间点的状态计算得出的,这使得算法能够有效地处理板凳龙的连续运动。同时,算法的迭代特性允许我们在每一步都进行必要的调整和修正,以确保计算结果的准确性。
模型数学公式与解释
我们现在来详细阐述空间螺线运动学模型的数学公式及其解释。首先,我们需要建立螺线的参数方程。在极坐标系中,螺线可以表示为:
r
=
a
θ
r = a\theta
r=aθ
其中,
r
r
r是极径,
θ
\theta
θ是极角,
a
a
a是一个常数,代表螺线的"紧密度"。在我们的问题中,
a
a
a与螺距
p
p
p有关,具体关系为:
a
=
p
2
π
a = \frac{p}{2\pi}
a=2πp
将极坐标转换为笛卡尔坐标,我们得到:
x
=
a
θ
cos
θ
x = a\theta\cos\theta
x=aθcosθ
y
=
a
θ
sin
θ
y = a\theta\sin\theta
y=aθsinθ
接下来,我们需要考虑时间因素。由于龙头前把手的行进速度恒定为1 m/s,我们可以建立时间
t
t
t与螺线参数
θ
\theta
θ之间的关系:
s
=
∫
0
θ
(
a
cos
θ
−
a
θ
sin
θ
)
2
+
(
a
sin
θ
+
a
θ
cos
θ
)
2
d
θ
=
t
s = \int_0^\theta \sqrt{(a\cos\theta - a\theta\sin\theta)^2 + (a\sin\theta + a\theta\cos\theta)^2} d\theta = t
s=∫0θ(acosθ−aθsinθ)2+(asinθ+aθcosθ)2
dθ=t
其中,
s
s
s是沿螺线的弧长。这个积分没有解析解,我们需要使用数值方法来求解。
现在,我们可以表示龙头前把手在时间
t
t
t的位置:
x
h
(
t
)
=
a
θ
(
t
)
cos
θ
(
t
)
x_h(t) = a\theta(t)\cos\theta(t)
xh(t)=aθ(t)cosθ(t)
y
h
(
t
)
=
a
θ
(
t
)
sin
θ
(
t
)
y_h(t) = a\theta(t)\sin\theta(t)
yh(t)=aθ(t)sinθ(t)
龙头前把手的速度可以通过对位置求导得到:
v
x
(
t
)
=
d
x
h
d
t
=
a
d
θ
d
t
(
cos
θ
−
θ
sin
θ
)
v_x(t) = \frac{dx_h}{dt} = a\frac{d\theta}{dt}(\cos\theta - \theta\sin\theta)
vx(t)=dtdxh=adtdθ(cosθ−θsinθ)
v
y
(
t
)
=
d
y
h
d
t
=
a
d
θ
d
t
(
sin
θ
+
θ
cos
θ
)
v_y(t) = \frac{dy_h}{dt} = a\frac{d\theta}{dt}(\sin\theta + \theta\cos\theta)
vy(t)=dtdyh=adtdθ(sinθ+θcosθ)
接下来,我们需要计算龙身和龙尾各把手的位置和速度。假设第
i
i
i个把手的位置为
(
x
i
,
y
i
)
(x_i, y_i)
(xi,yi),那么第
i
+
1
i+1
i+1个把手的位置可以通过以下方程计算:
(
x
i
+
1
−
x
i
)
2
+
(
y
i
+
1
−
y
i
)
2
=
L
2
(x_{i+1} - x_i)^2 + (y_{i+1} - y_i)^2 = L^2
(xi+1−xi)2+(yi+1−yi)2=L2
其中,
L
L
L是相邻两个把手之间的距离。这个方程反映了板凳龙的刚性结构。
为了求解这个方程,我们可以使用向量方法。定义从第
i
i
i个把手指向第
i
+
1
i+1
i+1个把手的单位向量为:
u
i
⃗
=
(
cos
ϕ
i
,
sin
ϕ
i
)
\vec{u_i} = (\cos\phi_i, \sin\phi_i)
ui
=(cosϕi,sinϕi)
其中,
ϕ
i
\phi_i
ϕi是这个向量与x轴的夹角。那么,第
i
+
1
i+1
i+1个把手的位置可以表示为:
x
i
+
1
=
x
i
+
L
cos
ϕ
i
x_{i+1} = x_i + L\cos\phi_i
xi+1=xi+Lcosϕi
y
i
+
1
=
y
i
+
L
sin
ϕ
i
y_{i+1} = y_i + L\sin\phi_i
yi+1=yi+Lsinϕi
ϕ
i
\phi_i
ϕi可以通过螺线的切线方向来确定。在螺线上,切线方向可以通过以下公式计算:
tan
ψ
=
θ
+
1
θ
−
1
\tan\psi = \frac{\theta + 1}{\theta - 1}
tanψ=θ−1θ+1
其中,
ψ
\psi
ψ是切线与径向的夹角。
第
i
+
1
i+1
i+1个把手的速度可以通过对位置求导得到:
(略,见完整版本)
这些公式构成了我们的空间螺线运动学模型的数学基础。通过这些公式,我们可以计算板凳龙在任意时刻的位置和速度。然而,由于模型的复杂性,大部分计算需要通过数值方法来完成。这就需要我们在实际求解过程中仔细选择合适的数值算法,以确保计算结果的准确性和效率。
问题一模型的求解
基于上述的空间螺线运动学模型和递推迭代算法,我们现在来详细描述如何求解问题一。我们的目标是计算从初始时刻到300秒为止,每秒整个舞龙队的位置和速度。
首先,我们需要初始化系统。我们设定坐标原点为螺线的中心,初始时间t=0s,龙头前把手的初始位置在螺线的第16圈。根据题目给出的信息,螺距p=55cm,我们可以计算出螺线参数a:
a
=
p
2
π
=
55
2
π
≈
8.75
cm
a = \frac{p}{2\pi} = \frac{55}{2\pi} \approx 8.75 \text{ cm}
a=2πp=2π55≈8.75 cm
接下来,我们需要确定龙头前把手的初始位置。由于龙头位于第16圈,我们可以估算初始的θ值:
θ
0
≈
16
⋅
2
π
=
32
π
\theta_0 \approx 16 \cdot 2\pi = 32\pi
θ0≈16⋅2π=32π
然后,我们进入主循环,对每一秒进行计算。在每一步中,我们首先计算龙头前把手的新位置。由于龙头前把手的行进速度恒定为1 m/s,我们可以通过数值积分方法(如龙格-库塔法)求解弧长方程来得到新的θ值。然后,我们可以计算龙头前把手的新位置:
x
h
(
t
)
=
a
θ
(
t
)
cos
θ
(
t
)
x_h(t) = a\theta(t)\cos\theta(t)
xh(t)=aθ(t)cosθ(t)
y
h
(
t
)
=
a
θ
(
t
)
sin
θ
(
t
)
y_h(t) = a\theta(t)\sin\theta(t)
yh(t)=aθ(t)sinθ(t)
龙头前把手的速度可以通过中心差分法计算:
v
x
(
t
)
≈
x
h
(
t
+
Δ
t
)
−
x
h
(
t
−
Δ
t
)
2
Δ
t
v_x(t) \approx \frac{x_h(t+\Delta t) - x_h(t-\Delta t)}{2\Delta t}
vx(t)≈2Δtxh(t+Δt)−xh(t−Δt)
v
y
(
t
)
≈
y
h
(
t
+
Δ
t
)
−
y
h
(
t
−
Δ
t
)
2
Δ
t
v_y(t) \approx \frac{y_h(t+\Delta t) - y_h(t-\Delta t)}{2\Delta t}
vy(t)≈2Δtyh(t+Δt)−yh(t−Δt)
其中,Δt是一个小的时间步长,比如0.01秒。
接下来,我们计算龙头后把手的位置和速度。这需要考虑龙头的长度(341cm)和方向。我们可以使用向量方法来处理这个问题:
(略,见完整版本)
其中,
r
h
⃗
\vec{r_h}
rh
是龙头后把手的位置向量。
然后,我们进入内循环,逐个计算龙身每个把手的位置和速度。对于第i个把手,我们可以使用以下方法:
(略,见完整版本)
最后,我们计算龙尾后把手的位置和速度。这可以通过与龙尾前把手的位置关系直接计算得到。
声明
本文内容仅代表作者观点,或转载于其他网站,本站不以此文作为商业用途
如有涉及侵权,请联系本站进行删除
转载本站原创文章,请注明来源及作者。