路径规划 | 图解LPA*算法(附ROS C++/Python/Matlab仿真)
CSDN 2024-08-03 10:01:02 阅读 95
目录
0 专栏介绍
1 什么是LPA*算法?
2 LPA*算法核心概念一览
3 LPA*算法流程
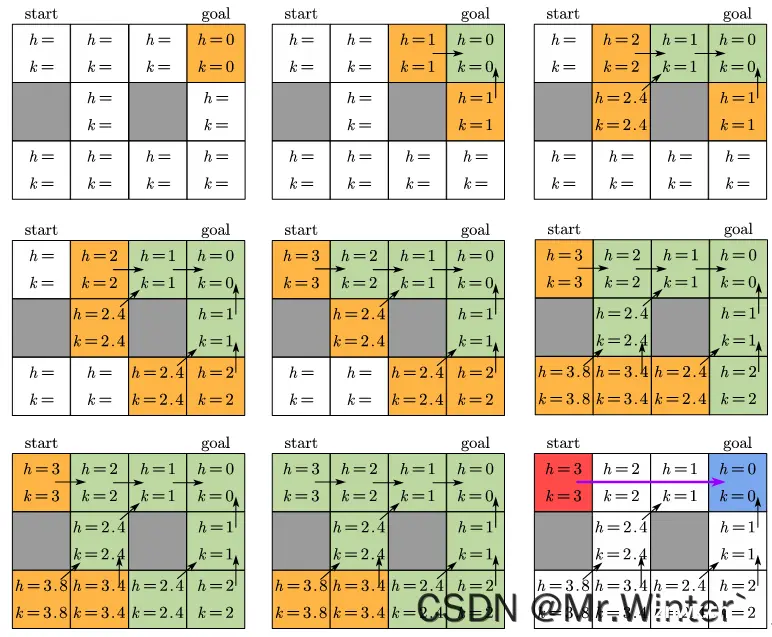
4 步步图解:算法实例
5 算法仿真与实现
5.1 ROS C++实现
5.2 Python实现
0 专栏介绍
🔥附C++/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。
🚀详情:图解自动驾驶中的运动规划(Motion Planning),附几十种规划算法
1 什么是LPA*算法?
在路径规划 | 图解动态A*(D*)算法(附ROS C++/Python/Matlab仿真)中我们介绍了D*算法,它最大的优势是可以同时兼容静态环境和存在未知动态变化的场景。
然而,D*虽然具备动态性,但由于算法只传播障碍信息,故规划路径只能保证可行性。例如D*算法中的实例
在将障碍移除后,该信息不会被感知。而终身规划A*(Lifelong Planning A*, LPA*)算法
声明
本文内容仅代表作者观点,或转载于其他网站,本站不以此文作为商业用途
如有涉及侵权,请联系本站进行删除
转载本站原创文章,请注明来源及作者。