2024-09-04 11:31:01
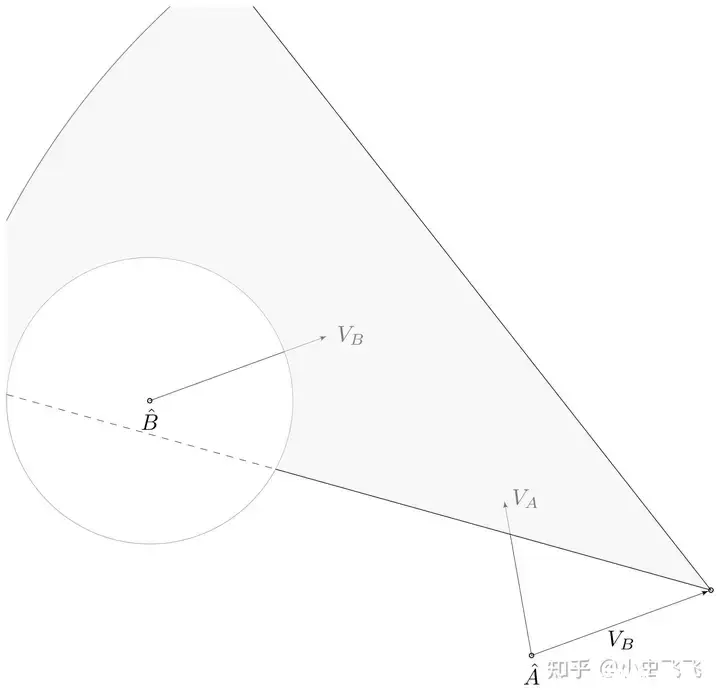
本文介绍了动态环境下,多智能体和障碍物持续运动,在没有统一调度和信息共享的情况下,各智能体通过观察周边智能体和障碍物的位置、速度,通过一定算法进行避让的解决方案。本文涉及三篇论文,基本代表了避障算法的基本思路与核...
浏览 64 次 标签: 运动规划-动态避让基础算法
热门文章
- 主角夏兮的小说 精品《夏兮苏逸瑾》小说在线阅读
- 楚临楚终南小说 (专业养猪二十年)小说全集免费在线阅读
- 羽栥亿李依咛全本章节阅读 羽毛蘸墨小说大结局无弹窗
- (无弹窗)傻丫刘向暖小说 精品《傻丫刘向暖》小说在线阅读
- (番外)+(全文)徐为栀白沉燃小说免费下载阅读_(一痕空梦锁流年:结局+番外)徐为栀白沉燃最新章节列表_笔趣阁(一痕空梦锁流年:结局+番外)
- 主角专业养猪二十年 小说楚临楚终南在线阅读 专业养猪二十年小说全部章节目录
- (完本)大结局小说《孟九轶谈屿臣》在线阅读 精品《孟九轶谈屿臣》小说在线阅读
- 小说罗俏俏卫衡完整版在线阅读 佚名小说全部章节目录
- 【抖音】热书张昱林雨薇苏晚全本章节阅读 张昱林雨薇苏晚小说全文免费阅读
名师推荐
- (婚情告急:段少的替罪娇妻:结局+番外)书荒宝藏热文必读推荐(段丞熠唐佳然)全文免费阅读无弹窗大结局_(婚情告急:段少的替罪娇妻:结局+番外)最新章节列表_笔趣阁(段丞熠唐佳然)
- 夏白入职地府:为了绩效嘎嘎乱杀小说无删减阅读无干扰(入职地府:为了绩效嘎嘎乱杀)番外+续集
- 《顾驰楚慕声》小说花如意最新章节阅读 (花如意)小说全集免费在线阅读
- (无弹窗)小说张倩秦小兰 作者假装破产后,我送黑心肠家人火葬场 小说全集免费在线阅读(橘儿有点儿酸)
- 秦铭女娲by洪荒:入股不亏,我逆天力挺大道 阿卡丽叔叔免费阅读 (阿卡丽叔叔)小说全集免费在线阅读
- 红番茄炖黄土豆 沈希瑶楚凌秋小说全文在线阅读
- 穿书九零,换亲后,她一心搞钱小说姜绵陆岩第3章 是空有呀小说全部章节目录
- 一痕空梦锁流年(徐为栀白沉燃:结局+番外)全文免费阅读无弹窗大结局_(一痕空梦锁流年)最新章节列表_笔趣阁(徐为栀白沉燃:结局+番外)
- 沈卿沈雨薇小说最新章完整版在线阅读 吃个酥小说全文免费试读