2024-08-16 08:01:03
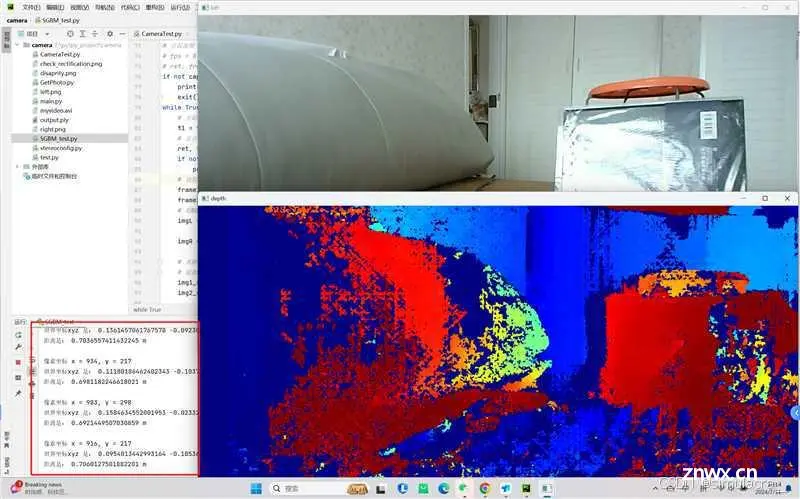
相机标定主要是为了获取左右相机的内参矩阵、畸变系数、旋转矩阵和平移向量,方便后续对获得的图像进行畸变矫正和图像对齐。是描述相机内在参数的3x3矩阵,包含了相机的焦距和光学中心的位置。这些参数定义了相机的成像过程中的...
浏览 75 次 标签: 【实战】双目测距python实现(含标定)
阅读排行
- 江肆冷傲雪小说 笔尖染血小说全文免费试读
- 小说九儿君启瑞 第二章宴会 九儿君启瑞小说全文在线阅读
- (番外)+(全文)夏白(入职地府:为了绩效嘎嘎乱杀:结局+番外)完整全文在线阅读_夏白免费阅读最新章节列表_笔趣阁(入职地府:为了绩效嘎嘎乱杀:结局+番外)
- 小说孟心怀吴野 第5章 吃土成金小说精彩章节在线阅读
- 小说崔瑶音沈云锦元安 1 会跳舞的棉花糖小说全文免费试读
- 小说方夏韩霜 和妻子划清关系第1章 方夏韩霜小说全文在线阅读
- (无弹窗)小说陈天秦霄 作者死亡倒计时?这分明就是预知未来 新书《陈天秦霄》小说全集阅读
- 顾笙萧迟鹤by花期不再,花照样开 3 (钱来)小说全集免费在线阅读
- (无弹窗)主角会跳舞的棉花糖小说免费阅读 会跳舞的棉花糖小说全部章节目录
名师推荐
- (无弹窗)小说顾知书沈琴 作者没有她的北海道 子妍小说全本无弹窗
- 捂不热的心,我不想再捂了(姜屿月闻聿风)免费阅读无弹窗大结局_捂不热的心,我不想再捂了小说(姜屿月闻聿风)免费阅读最新章节列表
- 暴戾帝王当众辱我,转身勾他兄弟楚婳祎君烬渊后续(楚婳祎君烬渊)全篇在线阅读前传
- 盘尾龙的主角名小说叫什么 盘尾龙小说大结局无弹窗
- 和老公一起重生后,他逃婚了《许锦心顾盛之》在线阅读 精品《许锦心顾盛之》小说在线阅读
- 七月十五小说 第二章 为难无错版阅读 季清晚叶回轩小说全文免费阅读
- 小说陈二海许晴雪全本阅读 (鱼恩)小说全集免费在线阅读
- 免费试读主角人间刺小说 人间刺小说全部章节目录
- 小说许南夕傅谨辰在线阅读 小说全集免费在线阅读(幽幽)