Structure of Linux Kernel Device Driver(Part II)
MorePower 2024-07-16 16:15:00 阅读 98
Structure of Linux Kernel Device Driver
ref. https://www.youtube.com/watch?v=XoYkHUnmpQo&list=LL&index=1&t=272s
Talk to the hardware
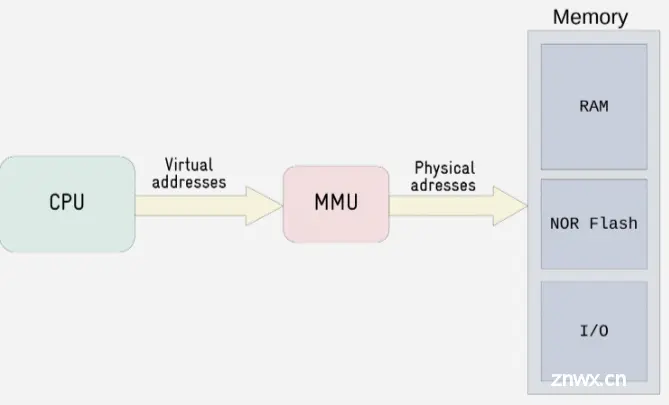
在操作系统中有几种机制能够让CPU与硬件设备进行通信:
- Port I/O: 使用一个专用的总线进行用心
- Memory-mapped I/O: 与硬件设备共享内存地址空间进行通信,(have the I/O devices mapped to our address spaces, so in the address space you have the registers there where you can talk to the hardware ),这种方法更为常见
在Memory-Mapped I/O(MMIO)机制中,将I/O设备映射到内存地址空间,然后CPU可以通过寄存器与硬件进行通信,所以当用户使用指针向某个地址写入数据,实际上是将数据写入了寄存器中。
使用mmio与硬件设备进行通信的三个步骤:
- 向MMIO寄存器发送请求,通过一些内核API完成,比如request_mem_region(), it's recommended, not mandatory
- 将寄存器的物理地址映射到虚拟地址,比如使用函数ioremap()
- 使用内核API读写寄存器,比如readb()\writeb(), readw()\writew(), readl()\writel(), readq()\writeq(),分别进行8-bit, 16-bit, 32-bit以及64-bit的读写
当然也可以使用函数ioremap()返回的指针进行读写,不过推荐使用内核封装的函数对这个指针进行操作,注意使用iounmap()释放掉这些地址空间。完成地址映射后,可以通过<code>cat \proc\iomem来查看I/O设备的地址映射。
下面这段代码用于控制一个LED灯设备的驱动:
#define GPIO1_BASE0x0209C000
#define GPIO1_SIZE8
#define LED_OFF0
#define LED_ON1
static struct {
dev_t devnum;
struct cdev cdev;
void __iomem *regbase;
// device datas area
} drvled_data;
static void drvled_setled(unsigned int status)
{
u32 val;
/* set value */
val = readl(drvled_data.regbase);
if (status == LED_ON)
val |= GPIO_BIT;
else if (status == LED_OFF)
val &= ~GPIO_BIT;
writel(val, drvled_data.regbase);
/* update status */
drvled_data.led_status = status;
}
static ssize_t my_write(struct file *file, const char __user *buf,
size_t count, loff_t *ppos)
{
char kbuf = 0;
if (copy_from_user(&kbuf, buf, 1))
return -EFAULT;
if (kbuf == '1') {
drvled_setled(LED_ON);
pr_info("LED ON!\n");
} else if (kbuf == '0') {
drvled_setled(LED_OFF);
pr_info("LED OFF!\n");
}
return count;
}
static const struct file_operations drvled_fops = {
.owner = THIS_MODULE,
.write = my_write,
};
static int __init init_module(void)
{
if (!request_mem_region(GPIO1_BASE, GPIO1_SIZE, "my_device_driver")) {
// handle error
}
drvled_data.regbase = ioremap(GPIO1_BASE, GPIO1_SIZE);
if (!drvled_data.regbase) {
// handle error
}
// Device driver initialization and installation
return 0;
}
static int __exit exit_module(void)
{
iounmap(drvled_data.regbase);
release_mem_region(GPIO1_BASE, GPIO1_SIZE);
// Unloading and unregistering the device driver
}
通过上面的这些API,可以通过读写对应了设备文件控制对应的硬件设备。下图是一个LED的驱动,其整体框架如下:
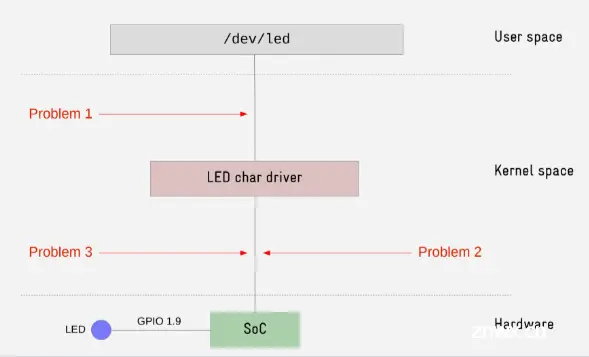
这样的框架存在一些问题:
- 用户访问设备文件所使用的接口是自定义的,而没有进行标准化
- 从GPIO控制器中为设备驱动分配了两个寄存器,那么其他GPIO将无法访问这两个寄存器,
假设GPIO控制器中有32个GPIO,那么没有人能够使用其余的另外31个GPIO
- 在设备驱动中采用硬编码的方式写入硬件相关的信息,那么如果修改了硬件,也必须修改驱动
因此,这样的框架还需要一定程度的解耦合并进行模块化。
Driver Model
Linux驱动模型提供了多个设备驱动抽象(abstraction to device drivers),这能够使驱动代码更模块化、可重用并且容易维护。
该驱动模型的组成如下:
- Framework:根据设备类型导出的标准化接口
- Buses:从设备驱动中抽象出来的设备信息以及设备所连接的位置
使用驱动框架(linux/leds.h for led device)将接口标准化后,意味着驱动开发者不再需要定义<code>file_operations来指定回调函数的行为,这些接口以及对应回调函数都由对应的框架完成定义。Users know beforehand the interface provided by a driver based on its class or type.
为了避免硬件资源被一个设备独占,需要使用特定的API进行动态控制,比如对于LED设备,Linux内核中实现了一种生产者/消费者的模型(gpiolib)来管理GPIO资源。
- GPIO producer,类似于GPIO控制器的驱动
- GPIO consumer,类似于LED设备的驱动
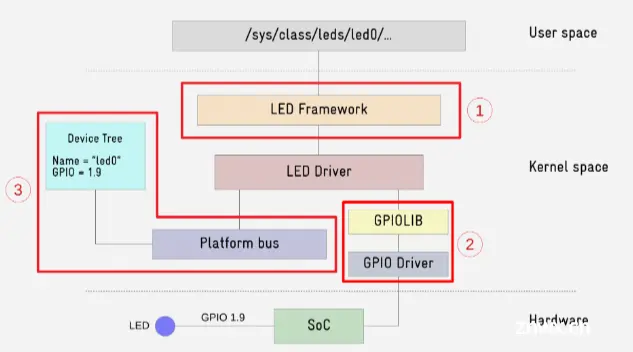
如下,使用了框架将用户接口标准化,并使用内核接口管理硬件资源:
#include <linux/leds.h>
// other header files
struct drvled_data_st {
struct gpio_desc *desc; // change from "void __iomem *regbase;"
struct led_classdev led_cdev; // change from "cdev"
};
static struct drvled_data_st *drvled_data;
static void drvled_setled(unsigned int status)
{
// not use the writel()
if (status == LED_ON)
gpiod_set_value(drvled_data->desc, 1);
else
gpiod_set_value(drvled_data->desc, 0);
}
static void drvled_change_state(struct led_classdev *led_cdev,
enum led_brightness brightness)
{
if (brightness)
drvled_setled(LED_ON);
else
drvled_setled(LED_OFF);
}
static int __init drvled_init(void)
{
int result = 0;
// no need for driver initialization
// no need for iommp for device
drvled_data = kzalloc(sizeof(*drvled_data), GFP_KERNEL);
if (!drvled_data) {
// handle error
}
result = gpio_request(GPIO_NUM, DRIVER_NAME);
if (result) {
// handle error
}
drvled_data->desc = gpio_to_desc(GPIO_NUM);
drvled_data->led_cdev.name = "ipe:red:user";
drvled_data->led_cdev.brightness_set = drvled_change_state;
result = led_classdev_register(NULL, &drvled_data->led_cdev);
if (result) {
// handle error
}
// ...
}
static void __exit drvled_exit(void)
{
led_classdev_unregister(&drvled_data->led_cdev);
// not use the iounmap()
gpio_free(GPIO_NUM);
release_mem_region(GPIO1_BASE, GPIO1_SIZE);
kfree(drvled_data);
}
// ...
使用设备框架对驱动进行重组后,用户不再直接与/dev/目录下的设备文件进行交互,而是在目录/sys/class/led目录下找到所有的LED类的设备,进入所注册的驱动目录下,可以找到控制LED设备的接口,这些接口仍然以文件的形式存在,但是和之前所定义的接口相比会更加标准化,也就是几乎所有的LED设备都可以使用这样的接口进行控制。
Bus infrastructure
最后,可以使用总线框架实现设备与驱动的解耦合。总线框架组成如下:
- Bus Core: 对于给定总线类型(USB core, PCI core, etc)所实现的API, (represented in the kernel by the "bus_type" structure)
- Bus adapters:总线控制器驱动, (represented in the kernel by the "device_driver" structure)
- Bus drivers: 负责管理连接到总线的设备, (represented in the kernel by the "device_driver" structure)
- Bus devices: 所有连接到总线的设备, (represented in the kernel by the structure "device")
总线框架如下图所示:

解耦合的实现:在总线框架中,驱动相当于是一种类(class),当用户在总线上注册设备时,将会产生这个类的实例。以I2C总线设备为例,下图演示了这个过程:

这个过程可以大致分为三步:
- 在Bus Core注册驱动
- 在Bus Core注册设备,随后Bus Core将会匹配对应的驱动
- 匹配成功后,Bus Core将会通过probe()函数调用驱动对应的回调函数,进行实例化
有很多种方法向总线注册一个设备:
声明
本文内容仅代表作者观点,或转载于其他网站,本站不以此文作为商业用途
如有涉及侵权,请联系本站进行删除
转载本站原创文章,请注明来源及作者。