全面讲解电子齿轮比与脉冲数计算
Lay_鑫辰 2024-10-12 17:07:06 阅读 65
一、什么是编码器分辨率
编码器(encoder)是将信号(如比特流)或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。编码器把角位移或直线位移转换为电信号,按照读出方式编码器可以分为接触式和非接触式两种;按照工作原理编码器可分为增量式和绝对式两类。
增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。绝对值编码器的每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关。
一般编码器分辨率可以查到,常见的有16位、17位、20位、23位等。
多少位,就是2的多少次方!位数越高,精度越高。
17位,就是2的17次方=131072
20位,就是2的20次方=1048576
23位,就是2的23次方=8388608
常见术语:
编码器分辨率(r):根据编码器决定了电机转一圈的脉冲个数每转脉冲数(ppr):使电机转一圈则上级控制器需发出的脉冲数
二、丝杆导程和减速比
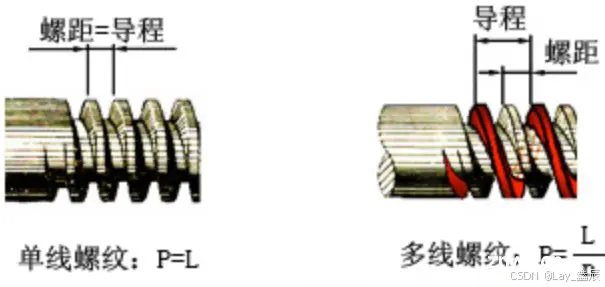
导程:丝杆螺旋线上相邻两螺纹峰之间的轴向距离
导程,也叫螺距,表示丝杆转一圈横向多少毫米
减速比A:B
表示电机(主轮)转B圈,实际轴(从轮)转A圈
一般是小的数值A:大的数值B
例如:1:3、1:10 如果没有减速机,减速比就是1:1
三、每转脉冲数如何计算

多少脉冲走1mm是自己来规定的,为了方便显示,一般规定100、1000或10000个脉冲走1mm。

四、如何计算电子齿轮比
电子齿轮比是用来放大或缩小从上级控制器所获得的脉冲频率。
电子齿轮比的分子是电机编码器转一圈的脉冲个数,其分母是使电机转一圈通过上级控制器所发出的脉冲数。
4.1 主要用途
①电子齿轮比是对从上级控制器获得的脉冲频率进行放大或缩小的;
②电子齿轮比是匹配电机脉冲数与机械最小移动量,通过电子齿轮设定可使指令脉冲设为任意值;
③电子齿轮比的分子是电机编码器转一圈的脉冲个数,分母是是电机转一圈通过上级控制器所发出的脉冲数。
4.2 用途及优势
调整电机旋转一圈PLC所需要的指令脉冲数,以保证电机转速能够达到需求转速。
若脉冲发生器输出频率为200KHz,伺服编码器分辨率8388608,此时伺服电机若要转一圈,需发送8388608个脉冲。那么想让电机转一圈,最快需要8388608/200000=41.943秒,速度极慢!
一般脉冲伺服即便编码器分辨率很高(常设置为10000脉冲),但受限于控制器侧(PLC、脉冲定位模块、板卡等)发脉冲的能力。
电子齿轮比相当于按比例放大缩小,伺服驱动器收到10000个脉冲之后,自动转换输出成8388608个脉冲,这样伺服电机就能转一圈了,极大地提高了速度!
避免脉冲数产生小数,取整后影响定位精度。
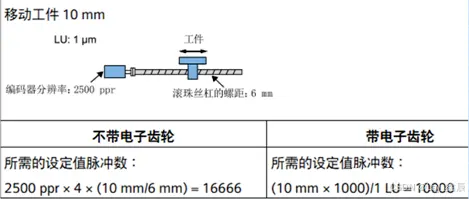
不带电子齿轮比:电机转一圈工件移动6mm, 则单位脉冲对应长度为6mm/10000=0.6um(4倍频);将工件移动10mm,则需要10mm/0.6um=16666.66个脉冲,实际发送脉冲时会舍去小数,产生误差!
带电子齿轮比:使用电子齿轮比后,可将电机旋转一圈设置为需要6000个脉冲,电机转一圈工件移动6mm,则单位脉冲对应长度是6mm/6000=1um;将工件移动10mm,则需要10mm/1um= 10000个脉冲,实际发送脉冲时不会产生小数,不产生误差!
4.3 实际案例计算
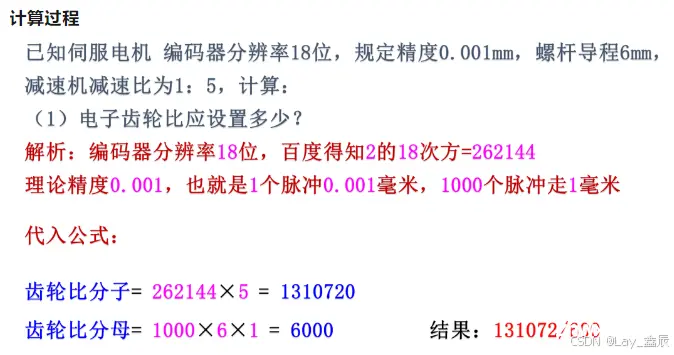
精度也叫脉冲当量,表示1个脉冲走多少毫米
例如:规定脉冲当量0.002,那就是1÷0.002=500脉冲/mm
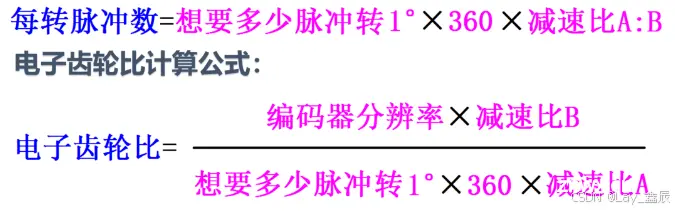
五、圆盘结构计算
圆盘转一圈,旋转360°,为了方便显示,我们一般规定360或3600或36000个脉冲转360°
六、 同步带结构计算
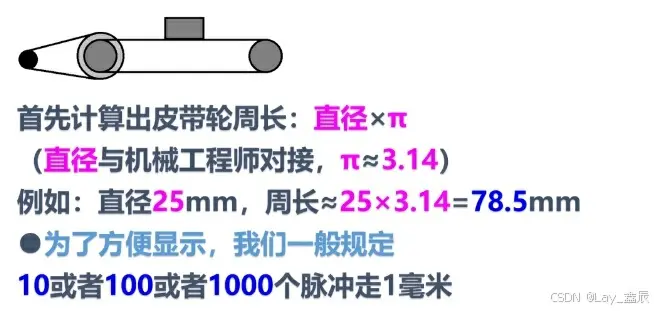
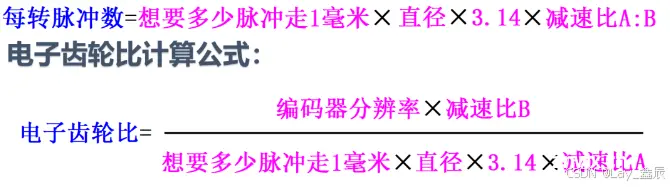
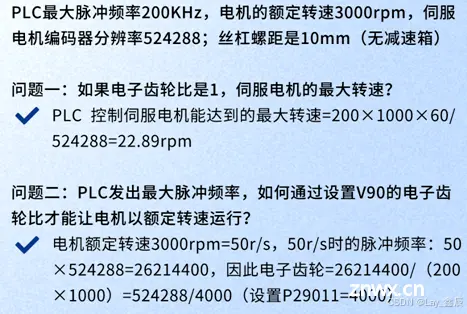
七、案例拓展
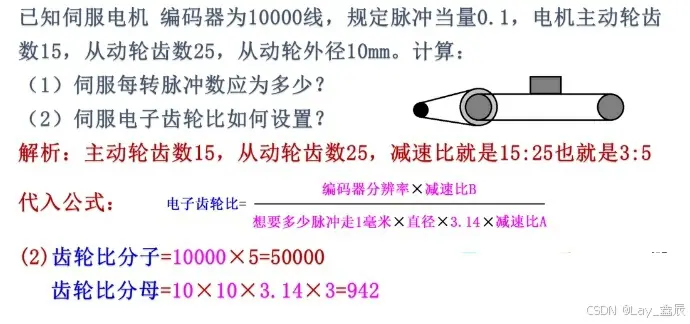
7.1 经典案例
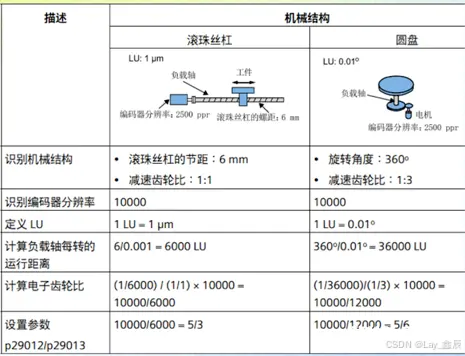
7.2 拓展案例
声明
本文内容仅代表作者观点,或转载于其他网站,本站不以此文作为商业用途
如有涉及侵权,请联系本站进行删除
转载本站原创文章,请注明来源及作者。