yolov8-obb训练自己的数据集(标注,训练,推理,转化模型 + C#模型部署)
该醒醒了~ 2024-08-22 11:35:07 阅读 68
一、源码
直接去下载官方的yolov8源码就行,那里面集成了 obb
ultralytics/ultralytics/cfg/models/v8 at main · ultralytics/ultralytics · GitHub
二、环境
如果你训练过yolov5以及以上的yolo环境,可以直接拷贝一个用就行,如果没有的话 直接pip
<code>pip install requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
可以配置cuda,跑的比较快
三、标注
标注方法有两种,一中是下载标注工具 X-Anylabeling
GitHub - CVHub520/X-AnyLabeling: Effortless data labeling with AI support from Segment Anything and other awesome models.
方法可以看我博客
X-AnyLabeling标注软件安装及使用dota数据集,voc数据集,coco数据集。以及报错No module named‘anylabeling‘的解决_x-anylabeling-cpu 导出 dota 没数据-CSDN博客
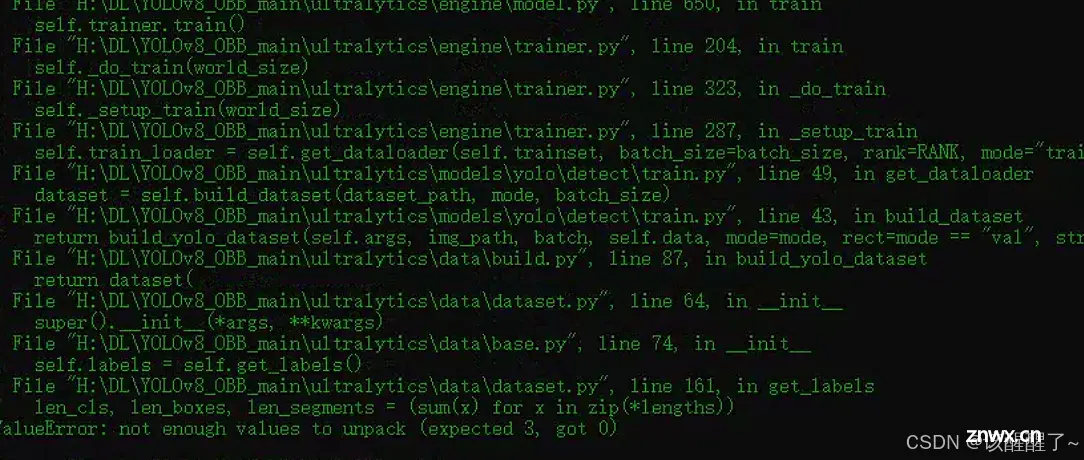
不过上面那种标注方式我训练时总是报错 一直找不到原因,有知道的可以指教指教

另一种标注方式
用rolabelimg旋转标注软件
GitHub - cgvict/roLabelImg: Label Rotated Rect On Images for training
旋转标注工具roLabelImg使用教程-CSDN博客
配置完环境后 直接右键运行 roLabelImg.py文件
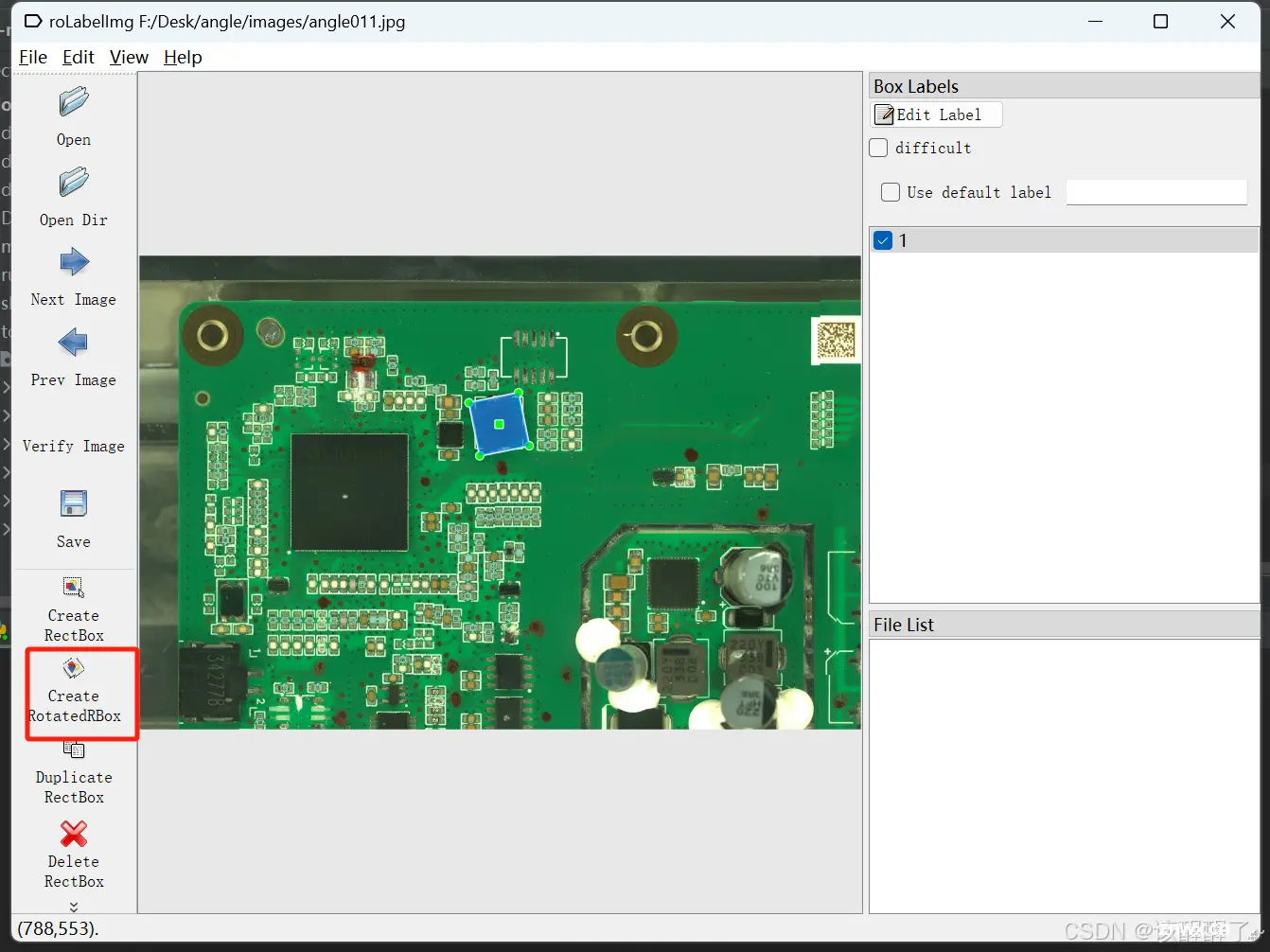
可以用旋转标注 标注后点击 标注的框 用 z,x,c,v 来更改 角度
生成的是xml文件
需要转换成dota能用的obb的txt文件
转换脚本
<code># 文件名称 :roxml_to_dota.py
# 功能描述 :把rolabelimg标注的xml文件转换成dota能识别的xml文件,
# 再转换成dota格式的txt文件
# 把旋转框 cx,cy,w,h,angle,或者矩形框cx,cy,w,h,转换成四点坐标x1,y1,x2,y2,x3,y3,x4,y4
import os
import xml.etree.ElementTree as ET
import math
cls_list = ['angle'] # 修改为自己的标签
def edit_xml(xml_file, dotaxml_file):
"""
修改xml文件
:param xml_file:xml文件的路径
:return:
"""
# dxml_file = open(xml_file,encoding='gbk')code>
# tree = ET.parse(dxml_file).getroot()
tree = ET.parse(xml_file)
objs = tree.findall('object')
for ix, obj in enumerate(objs):
x0 = ET.Element("x0") # 创建节点
y0 = ET.Element("y0")
x1 = ET.Element("x1")
y1 = ET.Element("y1")
x2 = ET.Element("x2")
y2 = ET.Element("y2")
x3 = ET.Element("x3")
y3 = ET.Element("y3")
# obj_type = obj.find('bndbox')
# type = obj_type.text
# print(xml_file)
if (obj.find('robndbox') == None):
obj_bnd = obj.find('bndbox')
obj_xmin = obj_bnd.find('xmin')
obj_ymin = obj_bnd.find('ymin')
obj_xmax = obj_bnd.find('xmax')
obj_ymax = obj_bnd.find('ymax')
# 以防有负值坐标
xmin = max(float(obj_xmin.text), 0)
ymin = max(float(obj_ymin.text), 0)
xmax = max(float(obj_xmax.text), 0)
ymax = max(float(obj_ymax.text), 0)
obj_bnd.remove(obj_xmin) # 删除节点
obj_bnd.remove(obj_ymin)
obj_bnd.remove(obj_xmax)
obj_bnd.remove(obj_ymax)
x0.text = str(xmin)
y0.text = str(ymax)
x1.text = str(xmax)
y1.text = str(ymax)
x2.text = str(xmax)
y2.text = str(ymin)
x3.text = str(xmin)
y3.text = str(ymin)
else:
obj_bnd = obj.find('robndbox')
obj_bnd.tag = 'bndbox' # 修改节点名
obj_cx = obj_bnd.find('cx')
obj_cy = obj_bnd.find('cy')
obj_w = obj_bnd.find('w')
obj_h = obj_bnd.find('h')
obj_angle = obj_bnd.find('angle')
cx = float(obj_cx.text)
cy = float(obj_cy.text)
w = float(obj_w.text)
h = float(obj_h.text)
angle = float(obj_angle.text)
obj_bnd.remove(obj_cx) # 删除节点
obj_bnd.remove(obj_cy)
obj_bnd.remove(obj_w)
obj_bnd.remove(obj_h)
obj_bnd.remove(obj_angle)
x0.text, y0.text = rotatePoint(cx, cy, cx - w / 2, cy - h / 2, -angle)
x1.text, y1.text = rotatePoint(cx, cy, cx + w / 2, cy - h / 2, -angle)
x2.text, y2.text = rotatePoint(cx, cy, cx + w / 2, cy + h / 2, -angle)
x3.text, y3.text = rotatePoint(cx, cy, cx - w / 2, cy + h / 2, -angle)
# obj.remove(obj_type) # 删除节点
obj_bnd.append(x0) # 新增节点
obj_bnd.append(y0)
obj_bnd.append(x1)
obj_bnd.append(y1)
obj_bnd.append(x2)
obj_bnd.append(y2)
obj_bnd.append(x3)
obj_bnd.append(y3)
tree.write(dotaxml_file, method='xml', encoding='utf-8') # 更新xml文件code>
# 转换成四点坐标
def rotatePoint(xc, yc, xp, yp, theta):
xoff = xp - xc;
yoff = yp - yc;
cosTheta = math.cos(theta)
sinTheta = math.sin(theta)
pResx = cosTheta * xoff + sinTheta * yoff
pResy = - sinTheta * xoff + cosTheta * yoff
return str(int(xc + pResx)), str(int(yc + pResy))
def totxt(xml_path, out_path):
# 想要生成的txt文件保存的路径,这里可以自己修改
files = os.listdir(xml_path)
i = 0
for file in files:
tree = ET.parse(xml_path + os.sep + file)
root = tree.getroot()
name = file.split('.')[0]
output = out_path + '\\' + name + '.txt'
file = open(output, 'w')
i = i + 1
objs = tree.findall('object')
for obj in objs:
cls = obj.find('name').text
box = obj.find('bndbox')
x0 = int(float(box.find('x0').text))
y0 = int(float(box.find('y0').text))
x1 = int(float(box.find('x1').text))
y1 = int(float(box.find('y1').text))
x2 = int(float(box.find('x2').text))
y2 = int(float(box.find('y2').text))
x3 = int(float(box.find('x3').text))
y3 = int(float(box.find('y3').text))
if x0 < 0:
x0 = 0
if x1 < 0:
x1 = 0
if x2 < 0:
x2 = 0
if x3 < 0:
x3 = 0
if y0 < 0:
y0 = 0
if y1 < 0:
y1 = 0
if y2 < 0:
y2 = 0
if y3 < 0:
y3 = 0
for cls_index, cls_name in enumerate(cls_list):
if cls == cls_name:
file.write("{} {} {} {} {} {} {} {} {} {}\n".format(x0, y0, x1, y1, x2, y2, x3, y3, cls, cls_index))
file.close()
# print(output)
print(i)
if __name__ == '__main__':
# -----**** 第一步:把xml文件统一转换成旋转框的xml文件 ****-----
roxml_path = r'H:\DL\YOLOv8_OBB_main\dataset_set\angle\1'
dotaxml_path = r'H:\DL\YOLOv8_OBB_main\dataset_set\angle\2'
out_path = r'H:\DL\YOLOv8_OBB_main\dataset_set\angle\4'
filelist = os.listdir(roxml_path)
for file in filelist:
edit_xml(os.path.join(roxml_path, file), os.path.join(dotaxml_path, file))
# -----**** 第二步:把旋转框xml文件转换成txt格式 ****-----
totxt(dotaxml_path, out_path)
转换后是如下的样子

但是这还没完,还需要再次转换一下
打开你的数据集中的标签文件夹,新建两个文档 名称如下

然后 复制你文件夹路径,不是图片 也不是标签
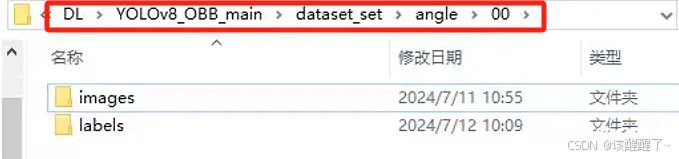
用obb中自带的转换脚本进行转换 那个路径是你数据集的路径
<code>from ultralytics.data.converter import convert_dota_to_yolo_obb
convert_dota_to_yolo_obb(r'H:\DL\YOLOv8_OBB_main\dataset_set\angle\00')
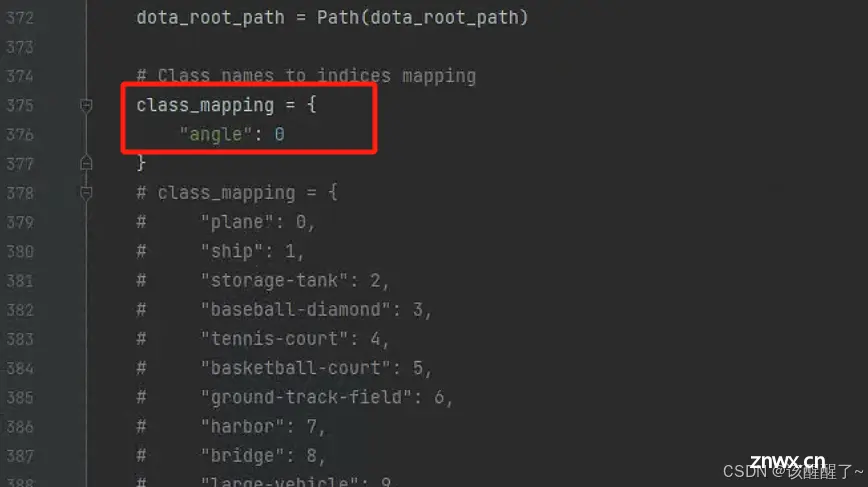
然后再按照ctrl+左键定位 这个函数 convert_dota_to_yolo_obb 直接可以定位到 converter.py 文件中
拉到大约376行修改你标注的标签名和数量
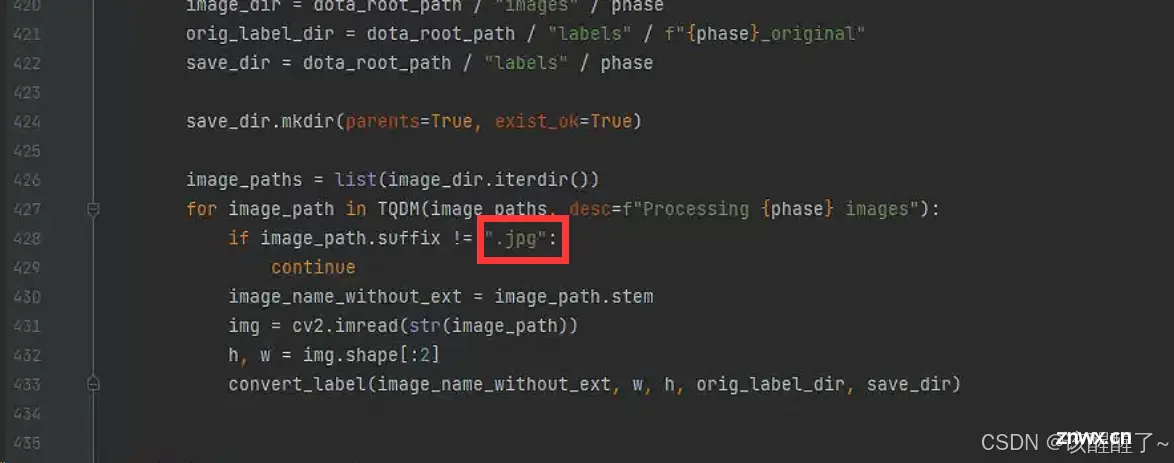
还有修改大约420行左右的地方 将这里改成你图片的后缀,不然就没有效果
然后你运行上方那个自带的转换代码,标签文件中会生成train和val两个文件夹
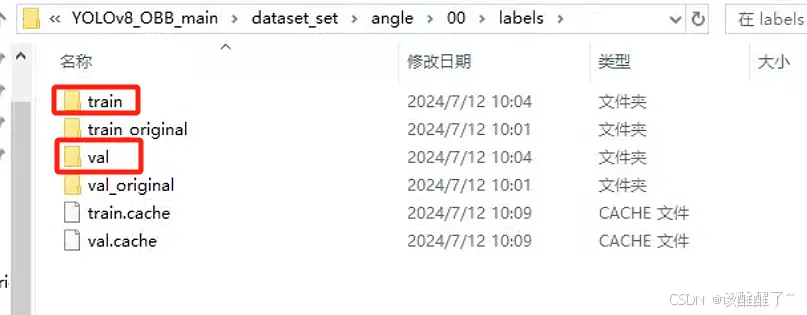
转换成功的txt如下,这就可以训练

配置好yolov8obb的环境和yaml文件,就可以训练了
训练
可以直接写新建一个py文件,train.py
<code>from ultralytics import YOLO
model_yaml_path = r"H:\DL\YOLOv8_OBB_main\ultralytics\cfg\models\v8\yolov8-obb.yaml"
#数据集配置文件
data_yaml_path = 'data/hat.yaml'
#预训练模型
pre_model_name = 'yolov8s-obb.pt'
def main():
model = YOLO(model_yaml_path).load(pre_model_name) # build from YAML and transfer weights
model.train(data=data_yaml_path,
epochs=500,
imgsz=640,
batch=6,
workers=5,
name="train_obb/exp")code>
if __name__ == '__main__':
main()
# yolo obb train data=data/hat.yaml model=yolov8s-obb.pt epochs=200 imgsz=640 device=0
detect.py 推理
from ultralytics import YOLO
# Load a model
# model = YOLO("yolov8n-obb.pt") # load an official model
model = YOLO(r"H:\DL\YOLOv8_OBB_main\runs\obb\train_obb\exp4\weights\best.pt") # load a custom model
# Predict with the model
results = model(r"C:\Users\Administrator\Desktop\gule\test",
name="detect_obb/exp",code>
conf=0.45,
save=True,
device='0'code>
) # predict on an image
模型转换 脚本代码
from ultralytics import YOLO
model=YOLO(r"H:\DL\YOLOv8_OBB_main\runs\obb\train_obb\exp16\weights\best.pt")
model.export(format='onnx',device='0')code>
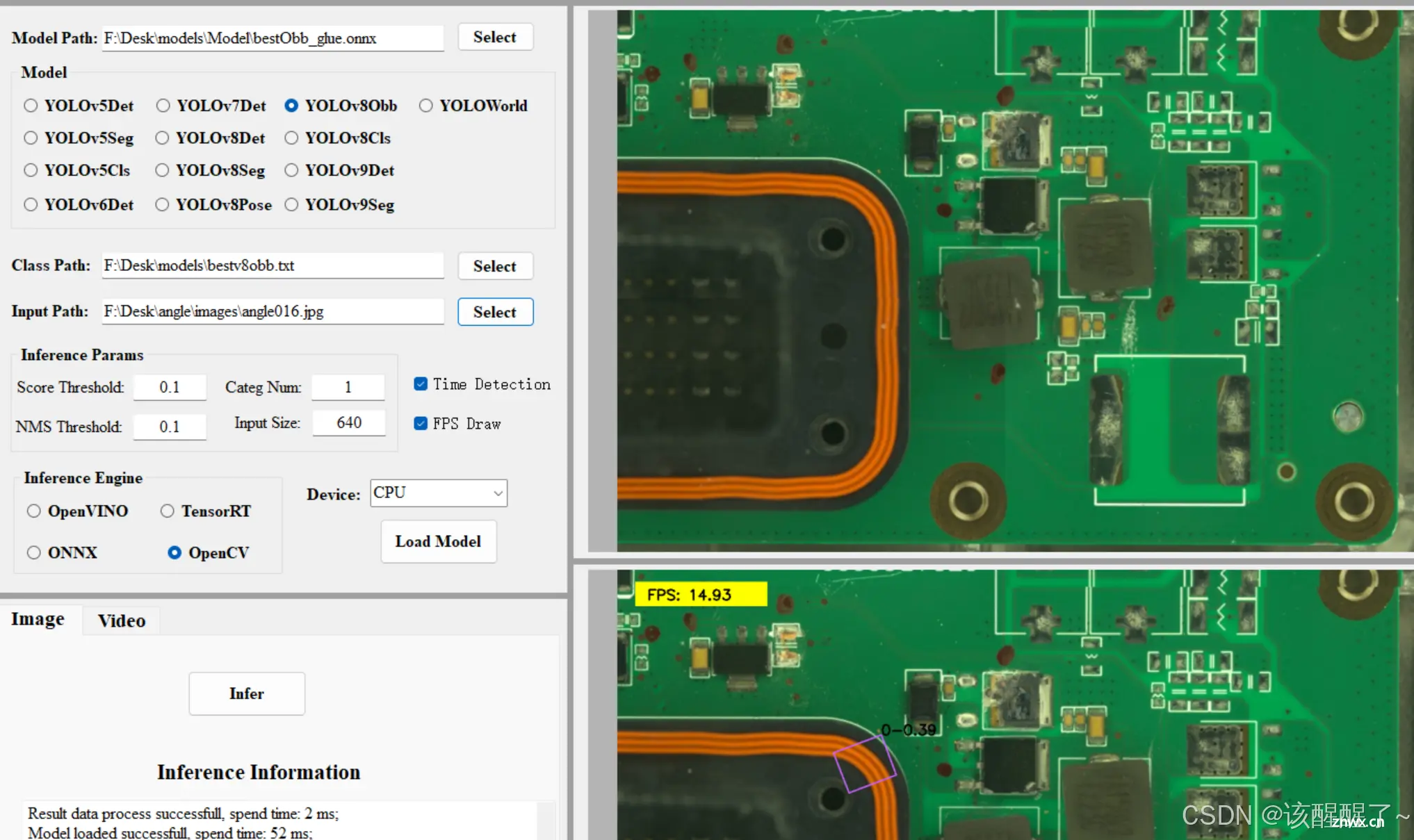
四、模型部署 C#
依旧是大佬的源码修改 https://github.com/guojin-yan/YoloDeployCsharp.git


然后缺哪种包 直接在nuget中下载就好
运行后如下
当然你也可以将其中的一个或者两个取出 进行封装为dll
创建class.cs文件 定义自己所需的nms 置信度 和 类别数量以及类别名

然后生成自己的dll 并且引到你的程序中
然后运行程序就可以了

有问题可以在评论区问或者私信我!!
声明
本文内容仅代表作者观点,或转载于其他网站,本站不以此文作为商业用途
如有涉及侵权,请联系本站进行删除
转载本站原创文章,请注明来源及作者。