《DNK210使用指南 -CanMV版 V1.0》第二十六章 摄像头图像捕获实验
cnblogs 2024-09-30 09:43:04 阅读 94
第二十六章 摄像头图像捕获实验
1)实验平台:正点原子DNK210开发板
2)章节摘自【正点原子】DNK210使用指南 - CanMV版 V1.0
3)购买链接:https://detail.tmall.com/item.htm?&id=782801398750
4)全套实验源码+手册+视频下载地址:http://www.openedv.com/docs/boards/k210/ATK-DNK210.html
5)正点原子官方B站:https://space.bilibili.com/394620890
6)正点原子K210技术交流企鹅群:605557868


本章将介绍CanMV下摄像头的使用,能通过摄像头实时地采集摄像头捕获到的图像数据,从而进行进一步的处理。通过本章的学习,读者将学习到通过CanMV驱动摄像头实时捕获图像数据。
本章分为如下几个小节:
26.1 sensor模块介绍
26.2 硬件设计
26.3 程序设计
26.4 运行验证
26.1 sensor模块介绍
sensor模块是CanMV内置的模块,sensor模块用于驱动摄像头,能够对摄像头进行配置并进行图像数据的捕获,从而实现一些拍摄任务。
sensor模块提供了reset()函数,用于重置并初始化摄像头,reset()函数如下所示:
<code>sensor.reset(freq=24000000, set_regs=True, choice=0, dual_buff=False)
reset()函数用于重置并初始化摄像头,该函数能够自动识别接入的且被支持的摄像头类型,并根据不同的摄像头进行不同的重置并初始化操作.
freq指的是摄像头像素时钟的频率,若该参数为空,则使用默认的24MHz。
set_regs指的是否让程序在初始化摄像头的过程中配置摄像头的寄存器,若开发者希望使用另外的寄存器配置方式初始化摄像头,可以将该参数配置为False,然后使用相应的寄存器配置函数自行配置摄像头的寄存器,该参数默认为True。
choice指的是接入的摄像头的类型,可选的参数如下表所示:
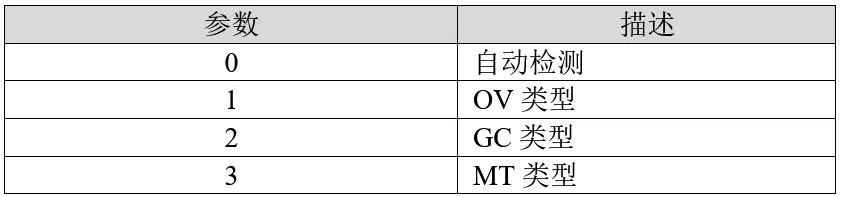
表26.1.1 choice可选参数描述
dual_buff指的是是否使能摄像头的双缓冲模式,当为True时,将使能双缓冲模式,此时sensor模块会为摄像头的帧缓冲分配两个大小均为帧大小的缓冲区,因此会更加占用内存,但好处是摄像头的捕获帧率在某些情况下可能会有所提升,当为False时,将禁用双缓冲模式,此时sensor模块将只会为摄像头的帧缓冲分配一个大小为帧大小的缓冲区,因此会更加地节省内存。
reset()函数的使用示例如下所示:
<code>import sensor
sensor.reset()
sensor模块提供了set_framesize()函数,用于配置摄像头输出的帧大小,set_framesize()函数如下所示:
sensor.set_framesize(framesize, set_regs=True)
set_framesize()函数用于配置摄像头输出的帧大小,也就是输出图像的像素分辨率,由于Kendryte K210的DVP最大支持的帧大小为640*480,因此摄像头输出的帧大小不应该超出这个值。
framesize指的是要配置的帧大小,可选的参数如下所示:
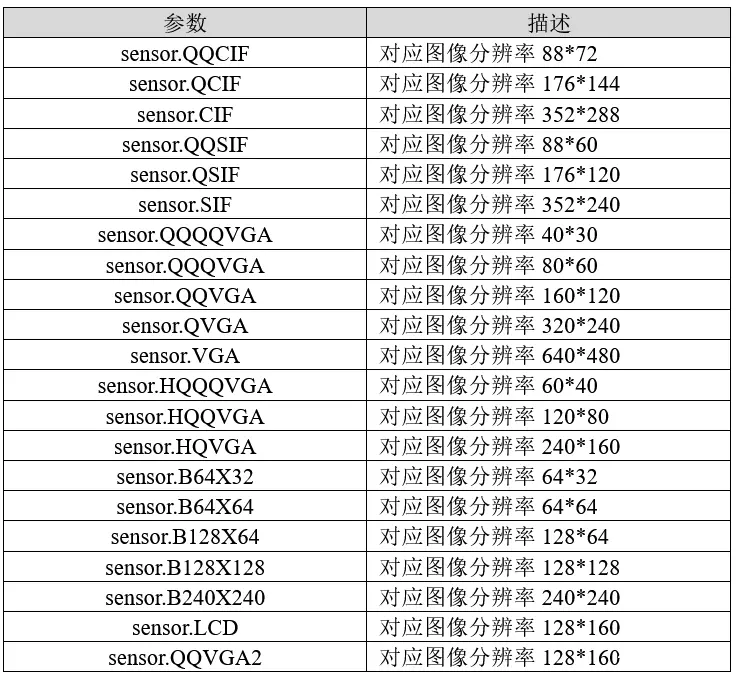
表26.1.2 framesize可选参数
set_regs指的是是否让程序在配置摄像头驱动程序时,根据所配置的帧大小配置摄像头的寄存器,若开发者希望自行配置摄像头的寄存器,可以将该参数配置为False,该参数默认为True。
set_framesize()函数的使用示例如下所示:
<code>import sensor
sensor.reset()
sensor.set_framesize(sensor.QVGA)
sensor模块提供了set_pixformat()函数,用于配置摄像头输出图像的像素格式,set_pixformat()函数如下所示:
sensor.set_pixformat(format, set_regs)
set_pixformat()函数用于配置摄像头输出图像的像素格式,由于DNK210开发板上的LCD屏幕使用的是RGB565的像素格式,因此推荐配置摄像头输出图像的像素格式也是RGB565.
format指的是要配置的图像像素格式,可选的参数如下所示:

表26.1.3 format可选参数
set_regs指的是是否让程序在配置摄像头驱动程序时,根据所配置的像素格式配置摄像头的寄存器,若开发者希望自行配置摄像头的寄存器,可以将该参数配置为False,该参数默认为True。
set_pixformat()函数的使用示例如下所示:
<code>import sensor
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor模块提供了snapshot()函数,用于获取摄像头捕获到的图像数据,snapshot()函数如下所示:
sensor.snapshot(update_jb=True)
snapshot()函数用于获取摄像头捕获到的图像数据,并返回一个Image对象。
update_jb指的是是否将捕获到的图像数据上传到CanMV IDE软件,当为True时,snapshot()函数捕获到的图像数据会被进行JPEG编码压缩后上传到CanMV IDE软件,这么一来便能在CanMV IDE软件的“帧缓冲区”窗口中看到snapshot()函数捕获到的图像数据,当为False时,snpshot()函数捕获到的图像数据不会被上传到CanMV IDE软件,这样的好处是,当与CanMV IDE软件连接时不用进行JPEG编码压缩以及图像数据上传的任务,从而降低CPU的使用率。
snapshot()函数的使用示例如下所示:
import sensor
sensor.reset()
sensor.set_framesize(sensor.QVGA)
sensor.set_pixformat(sensor.RGB565)
img = sensor.snapshot()
sensor模块提供了set_hmirror()函数,用于使能摄像头输出图像的水平镜像操作,set_hmirror()函数如下所示:
sensor.set_hmirror(enable)
set_hmirror()函数用于使能摄像头输出图像的水平镜像操作。
enable指的是是否使能摄像头输出图像的水平镜像功能,当为True时,使能摄像头输出图像的水平镜像功能,当为False时,禁止摄像头输出图像的水平镜像功能。
set_hmirror()函数的使用示例如下所示:
import sensor
sensor.reset()
sensor.set_framesize(sensor.QVGA)
sensor.set_pixformat(sensor.RGB565)
sensor.set_hmirror(False)
img = sensor.snapshot()
sensor模块提供了set_vflip()函数,用于使能摄像头输出图像的垂直翻转操作,set_vflip()函数如下所示:
sensor.set_vflip(enable)
set_vflip()函数用于使能摄像头输出图像的垂直翻转操作。
enable指的是是否使能摄像头输出图像的垂直翻转功能,当为True时,使能摄像头输出图像的垂直翻转功能,当为False时,禁止摄像头输出图像的垂直翻转功能。
set_vflip()函数的使用示例如下所示:
import sensor
sensor.reset()
sensor.set_framesize(sensor.QVGA)
sensor.set_pixformat(sensor.RGB565)
sensor.set_vflip(False)
img = sensor.snapshot()
sensor模块提供了set_jb_quality()函数,用于配置上传到CanMV IDE软件的JPEG图像的质量,set_jb_quality()函数如下所示:
sensor.set_jb_quality(quality=35)
set_jb_quality()函数用于配置上传到CanMV IDE软件的JPEG图像的质量,因为上传到CanMVIDE软件的图像会被先压缩成JPEG格式在进行上传,JPEG压缩时可以配置JPEG压缩的质量,这个质量越高压缩的程度越小,画面越精细,但压缩出来的JPEG图像体积也越大,反之如果JPEG压缩时配置的JPEG压缩质量越低,则压缩的程度越大,画面越粗糙,但压缩出来的JPEG图像体积也越小。
quality指的时JPEG图像压缩式的质量,范围为[0,100]。
set_jb_quality()函数的使用示例如下所示:
import sensor
sensor.reset()
sensor.set_framesize(sensor.QVGA)
sensor.set_pixformat(sensor.RGB565)
sensor.set_hmirror(False)
sensor.set_jb_quality(35)
img = sensor.snapshot()
sensor模块提供了set_contrast()函数,用于配置摄像头输出图像的对比度,set_contrast()函数如下所示:
sensor.set_contrast(contrast)
set_contrast()函数用于配置摄像头输出图像的对比度。
contrast指的是对比度的值,范围为[-2, 2]
set_contrast()函数的使用示例如下所示:
import sensor
sensor.reset()
sensor.set_framesize(sensor.QVGA)
sensor.set_pixformat(sensor.RGB565)
sensor.set_hmirror(False)
sensor.set_contrast(0)
img = sensor.snapshot()
sensor模块提供了set_brightness()函数,用于配置摄像头输出图像的亮度,set_brightness()函数如下所示:
sensor.set_brightness(brightness)
set_brightness()函数用于配置摄像头输出图像的亮度。
brightness指的是亮度的值,范围为[-2, 2]
set_brightness()函数的使用示例如下所示:
import sensor
sensor.reset()
sensor.set_framesize(sensor.QVGA)
sensor.set_pixformat(sensor.RGB565)
sensor.set_hmirror(False)
sensor.set_brightness(0)
img = sensor.snapshot()
sensor模块提供了set_saturation()函数,用于配置摄像头输出图像的饱和度,set_saturation()函数如下所示:
sensor.set_saturation(saturation)
set_saturation()函数用于配置摄像头输出图像的饱和度。
saturation指的是饱和度的值,范围为[-2, 2]
set_saturation()函数的使用示例如下所示:
import sensor
sensor.reset()
sensor.set_framesize(sensor.QVGA)
sensor.set_pixformat(sensor.RGB565)
sensor.set_hmirror(False)
sensor.set_saturation(0)
img = sensor.snapshot()
sensor模块提供了set_auto_gain()函数,用于配置摄像头自动增益,set_auto_gain()函数如下所示:
sensor.set_auto_gain(enable, gain_db, gain_db_ceiling)
set_auto_gain()函数用于配置摄像头的自动增益以及自动增益的上限值等。
enable指的是是否使能摄像头的自动增益,当为True时,使能摄像头的自动增益,当为False时,则不是能摄像头的自动增益。
gain_db指的是当不是能摄像头的自动增益时,设定的固定增益值,单位为dB,需要注意的时,当需要使用颜色追踪功能的时候,建议关闭摄像头的自动增益。
gain_db_ceiling指的是使能摄像头自动增益时,自动增益的上限值。
set_auto_gain()函数的使用示例如下所示:
import sensor
sensor.reset()
sensor.set_framesize(sensor.QVGA)
sensor.set_pixformat(sensor.RGB565)
sensor.set_hmirror(False)
sensor.set_auto_gain(True, gain_db=0, gain_db_ceiling=16.0)
img = sensor.snapshot()
sensor模块提供了set_auto_whitebal()函数,用于配置摄像头的自动白平衡,set_auto_whitebal()函数如下所示:
sensor.set_auto_whitebal(enable)
set_auto_whitebal()函数用于配置摄像头的自动白平衡。
enable指的是是否使能摄像头的自动白平衡功能,当为True时,则使能摄像头的自动白平衡功能,当为False时,则不使能摄像头的自动白平衡功能。
set_auto_whitebal()函数的使用示例如下所示:
import sensor
sensor.reset()
sensor.set_framesize(sensor.QVGA)
sensor.set_pixformat(sensor.RGB565)
sensor.set_hmirror(False)
sensor.set_auto_whitebal(True)
img = sensor.snapshot()
sensor模块提供了__write_reg()函数,用于写入摄像头的寄存器,__write_reg()函数如下所示:
sensor.__write_reg(address, value)
sensor.__write_reg()函数用于使用SCCB接口写入摄像头的寄存器。
address指的是摄像头的寄存器地址。
value指的是待写入摄像头寄存器的值。
__write_reg()函数的使用示例如下所示:
import sensor
sensor.reset()
sensor.__write_reg(0xFF, 0x01)
sensor模块提供了__read_reg()函数,用于读取摄像头的寄存器,__read_reg()函数如下所示:
sensor.__read_reg(address)
sensor.__read_reg()函数用于使用SCCB接口读取摄像头的寄存器,并返回读取到的值。
address指的是摄像头的寄存器地址。
__read_reg()函数的使用示例如下所示:
import sensor
sensor.reset()
pid = sensor.__read_reg(0x0A) << 8
pid |= sensor.__read_reg(0x0B)
print("Sensor'sproduct ID: 0x%04X" %(pid))
26.2 硬件设计
26.2.1 例程功能
- 使用sensor模块初始化板载的摄像头,并配置摄像头的输出帧大小以及输出格式等进行配置,最后获取摄像头采集到的图像数据,并在LCD以及CanMV IDE软件的“帧缓冲区”窗口进行显示。
26.2.2 硬件资源
- 摄像头
SCCB_SDA- IO40
SCCB_SCL- IO41
DVP_RESET- IO42
DVP_VSYNC- IO43
DVP_PWDN- IO44
DVP_HREF- IO45
DVP_XCLK- IO46
DVP_PCLK- IO47
D0~D7- DVP_D0~DVP_D7
- LCD
LCD_RD- IO34
LCD_BL- IO35
LCD_CS- IO36
LCD_RST- IO37
LCD_RS- IO38
LCD_WR- IO39
LCD_D0~LCD_D7- SPI0_D0~SPI0_D7
26.2.3 原理图
本章实验内容,需要使用到板载的摄像头接口,在正点原子DNK210开发板上有两处摄像头接口分别为位于正点原子DNK210开发板底板上的ATK-MC2640摄像头模块接口,该接口用于连接正点原子的ATK-MC2640模块,另一个摄像头接口位于正点原子CNK210F核心板,该接口同于直接连接OV2640等摄像头模组,但需要特别注意的是,这两个摄像头接口不能同时使用,否则可能导致硬件损坏。
正点原子DNK210开发板上的ATK-MC2640摄像头模块接口的连接原理图,如下图所示:
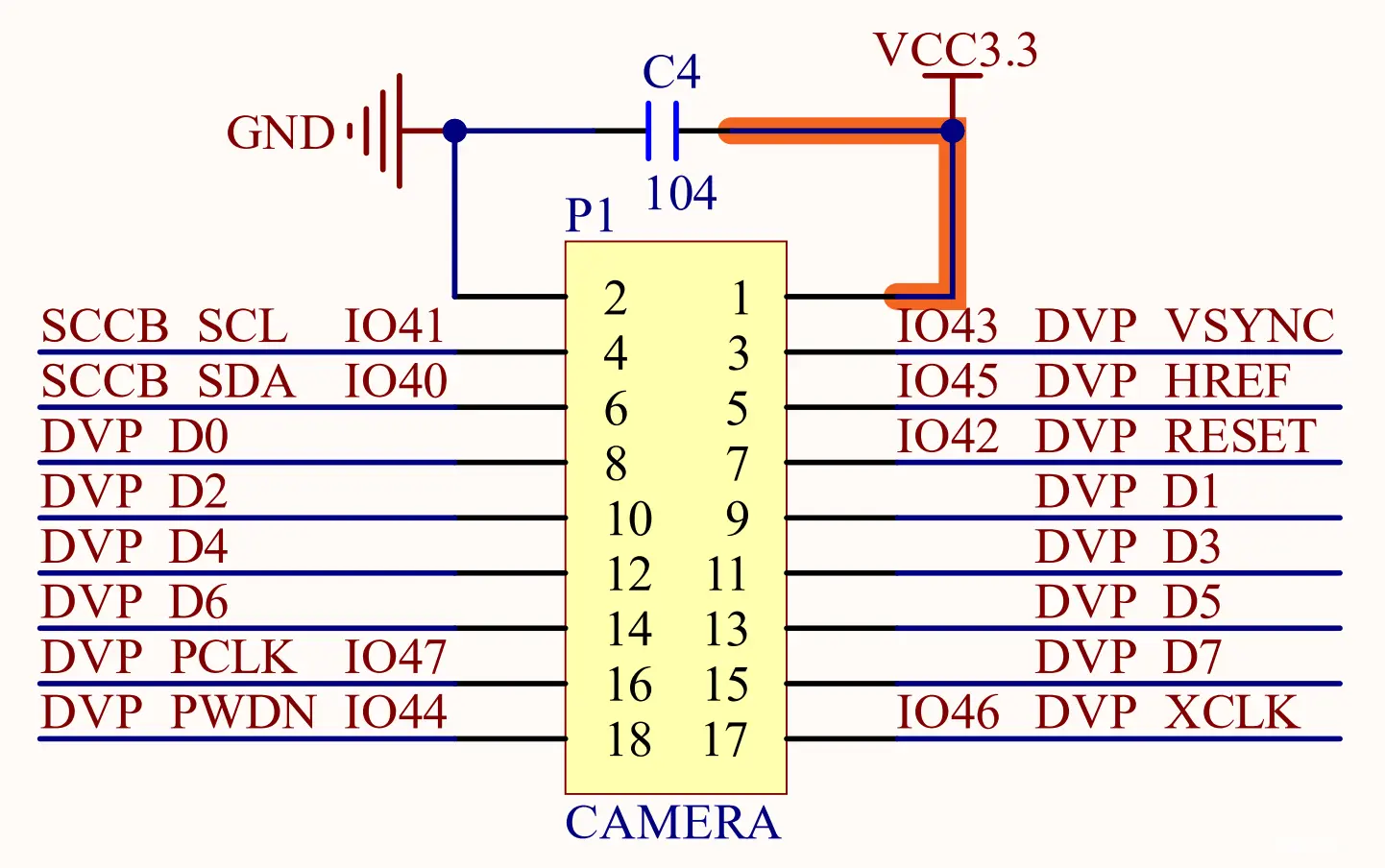
图26.2.3.1ATK-MC2640摄像头模块接口原理图
正点原子CNK210F核心板上的OV2640等摄像头模组接口的连接原理图,如下图所示:
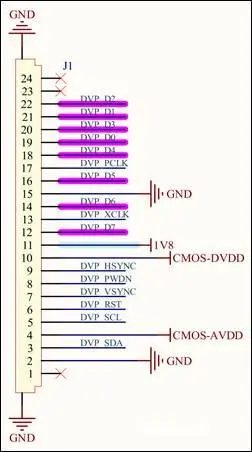
图26.2.3.2OV2640等摄像头模组接口原理图
26.3 程序设计
26.3.1 sensor模块
有关sensor模块的介绍,请见第26.1小节《sensor模块介绍》。
26.3.2 程序流程图
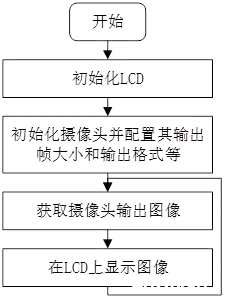
图26.3.2.1 摄像头图像捕获实验流程图
26.3.3 main.py代码
main.py中的脚本代码如下所示:
<code>import lcd
import sensor
# 初始化LCD
lcd.init()
# 初始化摄像头
sensor.reset()
# 设置摄像头输出帧大小
sensor.set_framesize(sensor.QVGA)
# 设置摄像头输出格式
sensor.set_pixformat(sensor.RGB565)
# 设置摄像头水平镜像
sensor.set_hmirror(False)
while True:
# 获取摄像头输出图像
img= sensor.snapshot()
# 显示摄像头输出图像至LCD
lcd.display(img)
可以看到首先对LCD和摄像头进行了初始化。
接着是配置摄像头输出的帧大小以及输出格式。
然后是针对摄像头的摆放方向配置摄像头进行水平镜像,水平镜像后后续才能在LCD和CanMV IDE软件的“帧缓冲区”窗口中看到“较为正常”的图像画面。
最后就是在一个循环中不断地获取摄像头输出的图像数据,然后将图像在LCD显示屏上进行显示。
26.4 运行验证
将DNK210开发板连接CanMV IDE后,点击CanMV IDE上的“开始(运行脚本)”按钮后,可以看到LCD上实时地显示这摄像头采集到的画面,如下图所示:

图26.4.1 LCD显示摄像头采集图像
此时,若使能了CanMV IDE软件的“帧缓冲区”窗口功能,则同时能在CanMV IDE软件的“帧缓冲区”窗口看到摄像头采集的图像画面,如下图所示:

图26.4.2 CanMV IDE软件“帧缓冲区”窗口显示摄像头采集图像
声明
本文内容仅代表作者观点,或转载于其他网站,本站不以此文作为商业用途
如有涉及侵权,请联系本站进行删除
转载本站原创文章,请注明来源及作者。