ROS学习笔记(二):鱼香ROS — 超便捷的一键安装/配置/换源指令(Ubuntu/ROS/ROS2/IDE等)
CSDN 2024-10-21 09:37:02 阅读 61
文章目录
前言鱼香ROS1 一键安装:快速搭建开发环境2 具体使用2.1 如何开始?2.2 我的常用配置方案2.3 安装示例
3 总结相关链接
前言
关于Ubuntu与ROS的常规安装,可以看这几篇。
SLAM实操入门(一):在已有WIN10的电脑上安装Ubuntu20.04SLAM实操入门(二):安装ROS Noetic并运行“小乌龟”程序ROS学习笔记(一):ROS1入门简明介绍(附详细注释)
本系列主要用来记录学习ROS的相关内容,本文为ROS操作系统简明概要。
鱼香ROS
在机器人开发中,ROS(Robot Operating System)是不可或缺的工具。然而,ROS的安装和配置可能让初学者望而却步。
感谢鱼香ROS社区推出了一系列便捷的一键安装工具,让大家可以非常轻松、快速地搭建开发环境。
1 一键安装:快速搭建开发环境
鱼香ROS一键安装的开源地址为:
小鱼的一键安装系列(社区地址)小鱼的一键安装系列(github开源仓库)
目前支持的工具有:
一键安装:ROS(支持ROS和ROS2,树莓派Jetson)一键安装:VsCode(支持amd64和arm64)一键安装:github桌面版(小鱼常用的github客户端)一键安装:nodejs开发环境一键安装:Docker(支持amd64和arm64)一键安装:cartographer 贡献一键安装:微信客户端一键配置:rosdep(小鱼的rosdepc,又快又好用)一键配置:ROS环境(快速更新ROS环境设置,自动生成环境选择)一键配置:系统源(更换系统源,支持全版本Ubuntu系统) 贡献
项目提供了一键安装指令,帮助开发者一键完成安装和配置。
wget http://fishros.com/install -O fishros && . fishros
该指令支持系统一键换源、ROS1/ROS2的一键安装,还涵盖了VSCode、GitHub桌面版等常用开发软件,极大简化了开发流程。只需要一行命令,就能自动完成安装,节省了大量手动配置的时间。
2 具体使用
2.1 如何开始?
该命令的使用非常简单,打开终端,粘贴一键安装指令

输入权限密码后,会直接进入安装菜单:
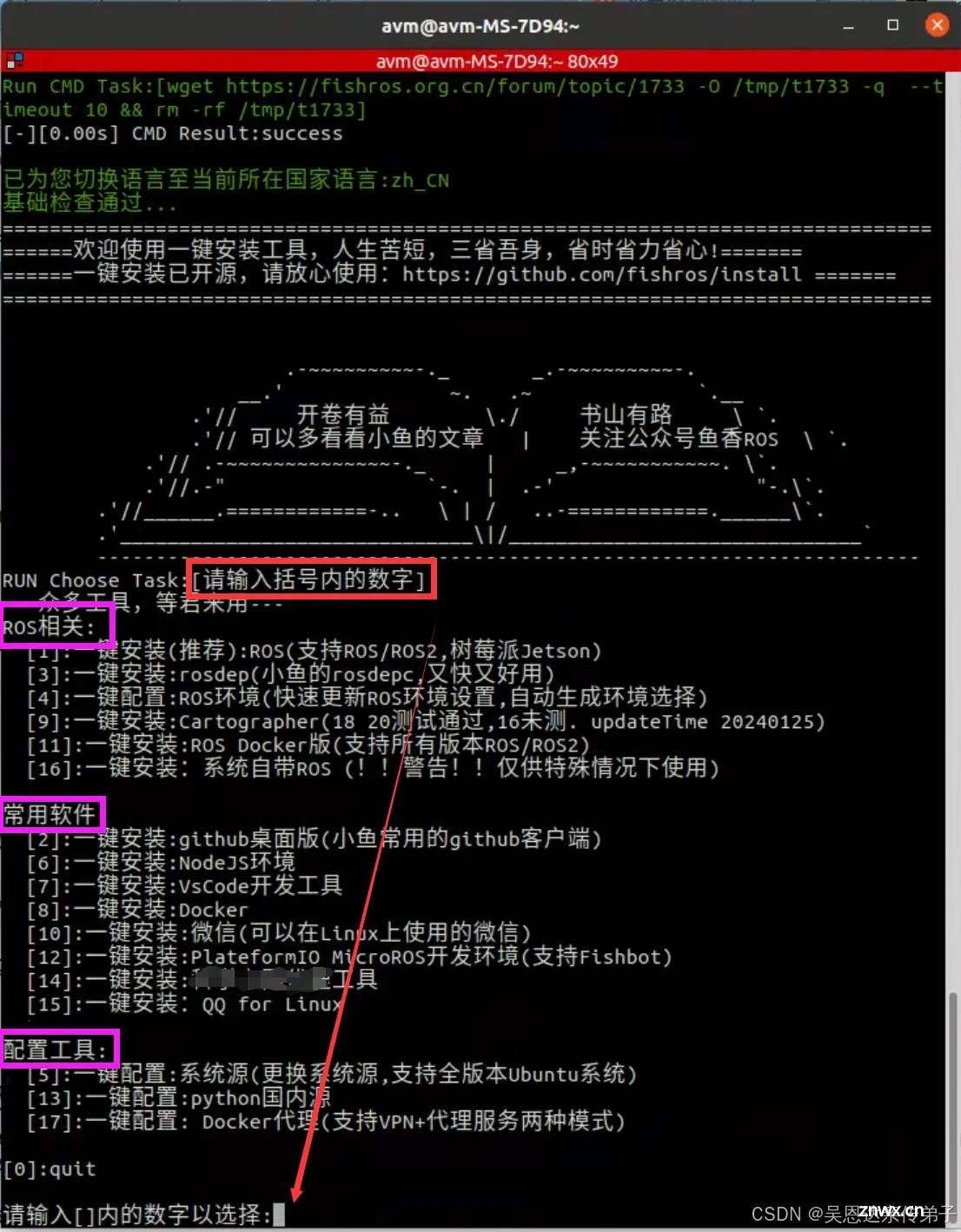
我们可以看到菜单介绍非常清晰,主要包括了三大类:
ROS相关
安装ROS1/ROS2本体及相关工具
常用的一般就是 [1](安装ROS)和 [3](rosdep自动安装项目ROS依赖)常用软件
安装VsCode等集成开发环境,以及微信、QQ等的Linux版本
按需安装即可配置工具
更换系统源、配置python源等
只需要在终端中输入具体内容前的数字,即可执行安装程序
2.2 我的常用配置方案
通常而言,在一台新的ubuntu系统上,我会按如下顺序进行快速配置
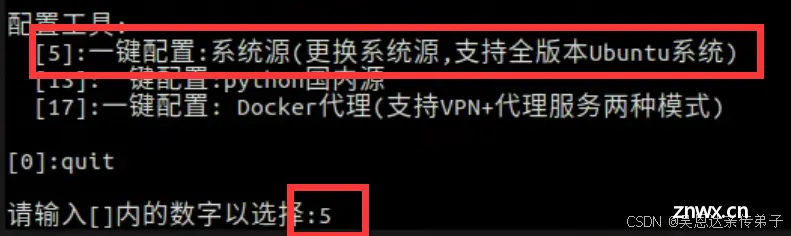
【5】:一键配置:系统源(更换系统源,支持全版本Ubuntu系统)
安装后
sudo apt update
sudo apt upgrade
【14】:一键安装:xxxxxxx工具
(自己尝试一下看)
【7】:一键安装:VsCode开发工具
(非常常用的集成开发环境 / IDE)
【1】:一键安装(推荐):ROS(支持ROS/ROS2,树莓派Jetson)
(根据系统与需求安装ROS)
【3】:一键安装:rosdep(小鱼的rosdepc,又快又好用)
(rosdep工具自动安装依赖)
2.3 安装示例
以更换系统源为例,在终端中输入前方序号【5】,回车
这时会出现一个新的选择菜单,如图所示,根据提示选择【2】,回车
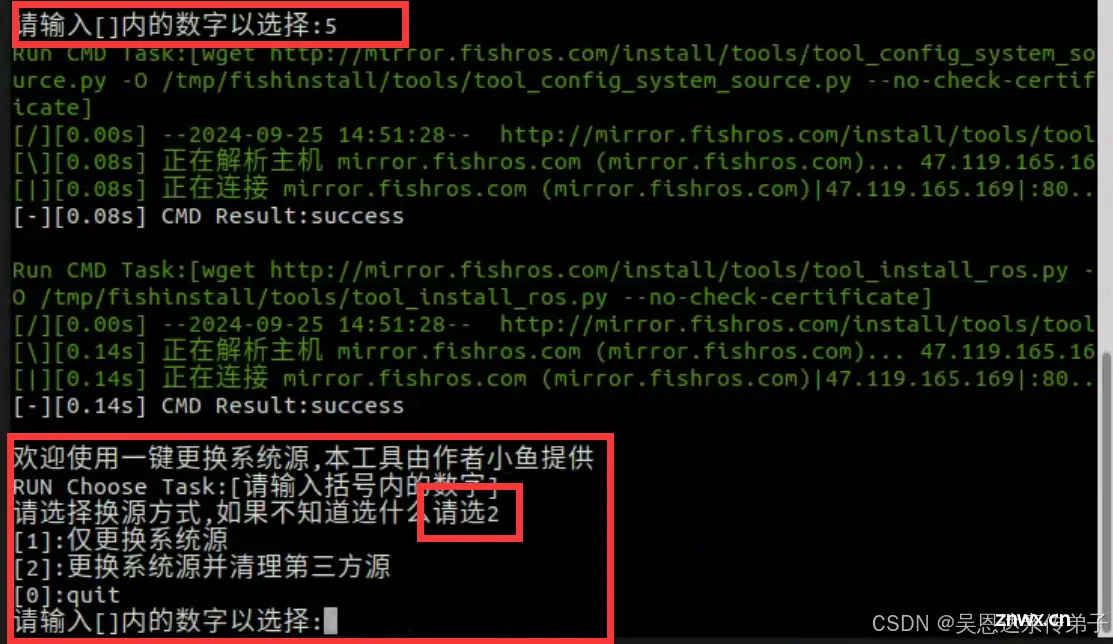
接下来就会自动针对不同源进行测速,并更换合适的源了,什么都不用管,非常方便

完成镜像后会出现新的菜单,可以选择添加ROS源,输入【1】
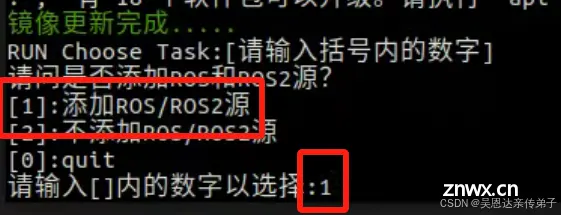
安装其他的内容操作类似,根据提示来即可
3 总结
总结来说,通过鱼香ROS开发的一键安装命令,降低了环境配置与ROS开发的复杂性,让更多的开发者能够快速上手,而不是耗费时间在环境配置上。
相关链接
其他内容可参考:
SLAM实操入门(一):在已有WIN10的电脑上安装Ubuntu20.04SLAM实操入门(二):安装ROS Noetic并运行“小乌龟”程序ROS学习笔记(一):ROS1入门简明介绍(附详细注释)
声明
本文内容仅代表作者观点,或转载于其他网站,本站不以此文作为商业用途
如有涉及侵权,请联系本站进行删除
转载本站原创文章,请注明来源及作者。