智能车PID控制详细介绍(普通PID、串级PID、改进PID)——适用于四轮车、三轮车、平衡车
Rise_wsc 2024-08-02 12:35:01 阅读 60
目录
智能车运动控制系统一、 PWM(脉冲宽度调制)原理二、 PID控制基本原理三、 舵机处理系统1 舵机组成及其工作原理2 舵机PID控制策略
四、 直流电机调速1 直流电机调速系统组成及其工作原理2 电机PID控制策略一、四轮电机控制二、两轮平衡车与三轮车的电机控制①两轮平衡车的姿态控制(串级PID)②两轮平衡车与三轮车的转向控制
声明:该文是本人原创,后续将参与智能车相关书籍的写作,为了防止侵权只能先发图片版还请谅解,如有问题,敬请指出,欢迎讨论~~~~
智能车运动控制系统
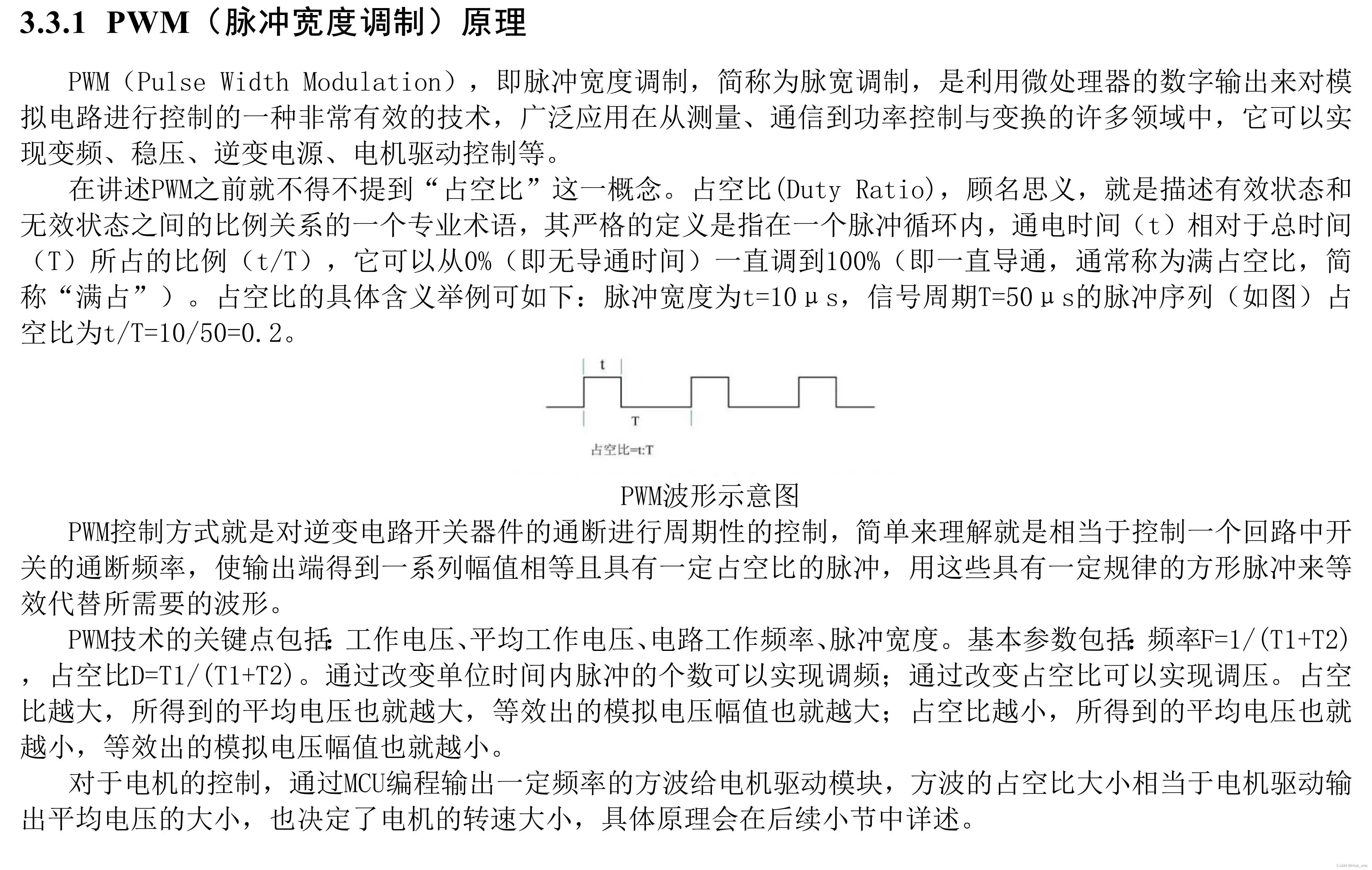
一、 PWM(脉冲宽度调制)原理
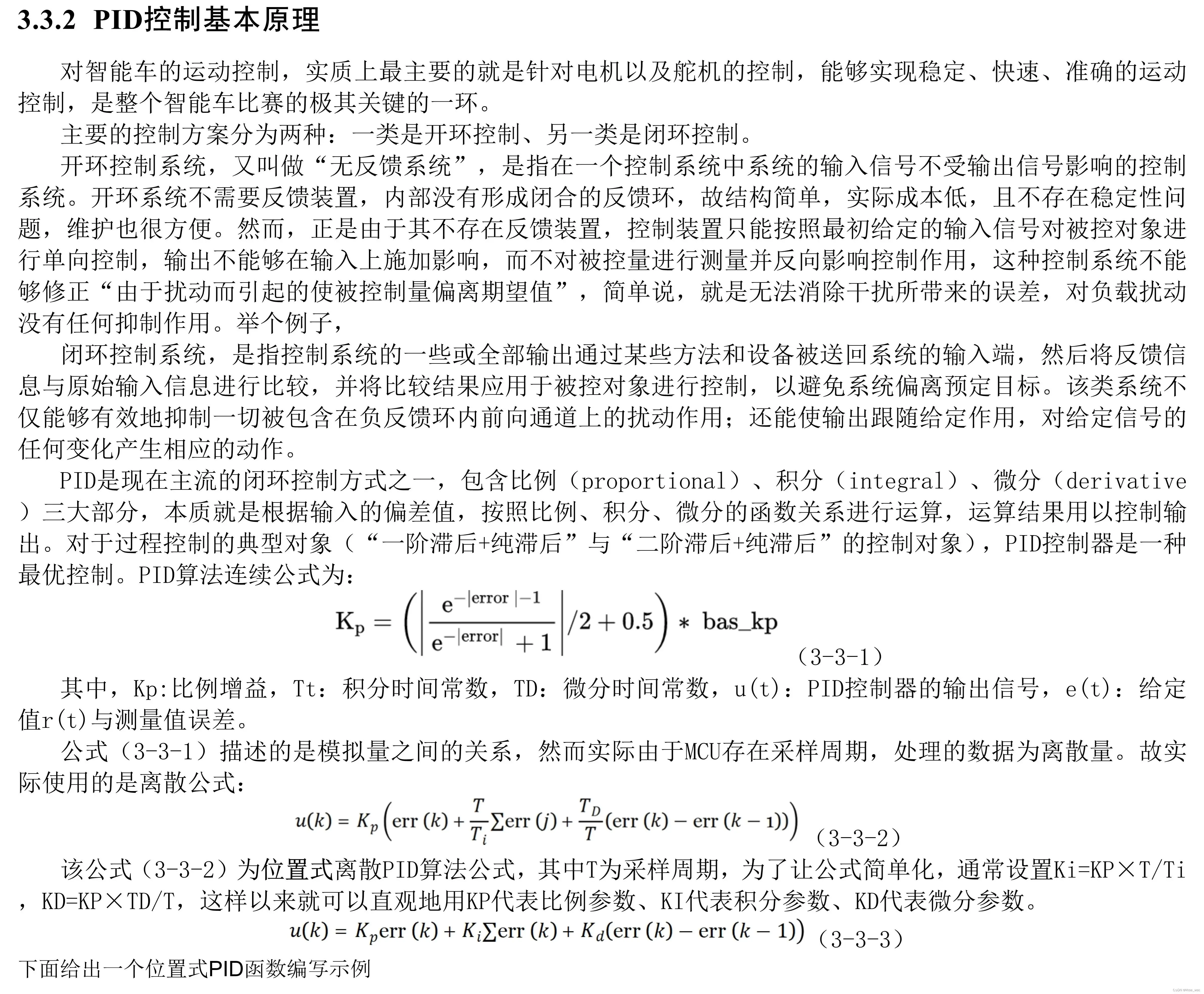
二、 PID控制基本原理
三、 舵机处理系统
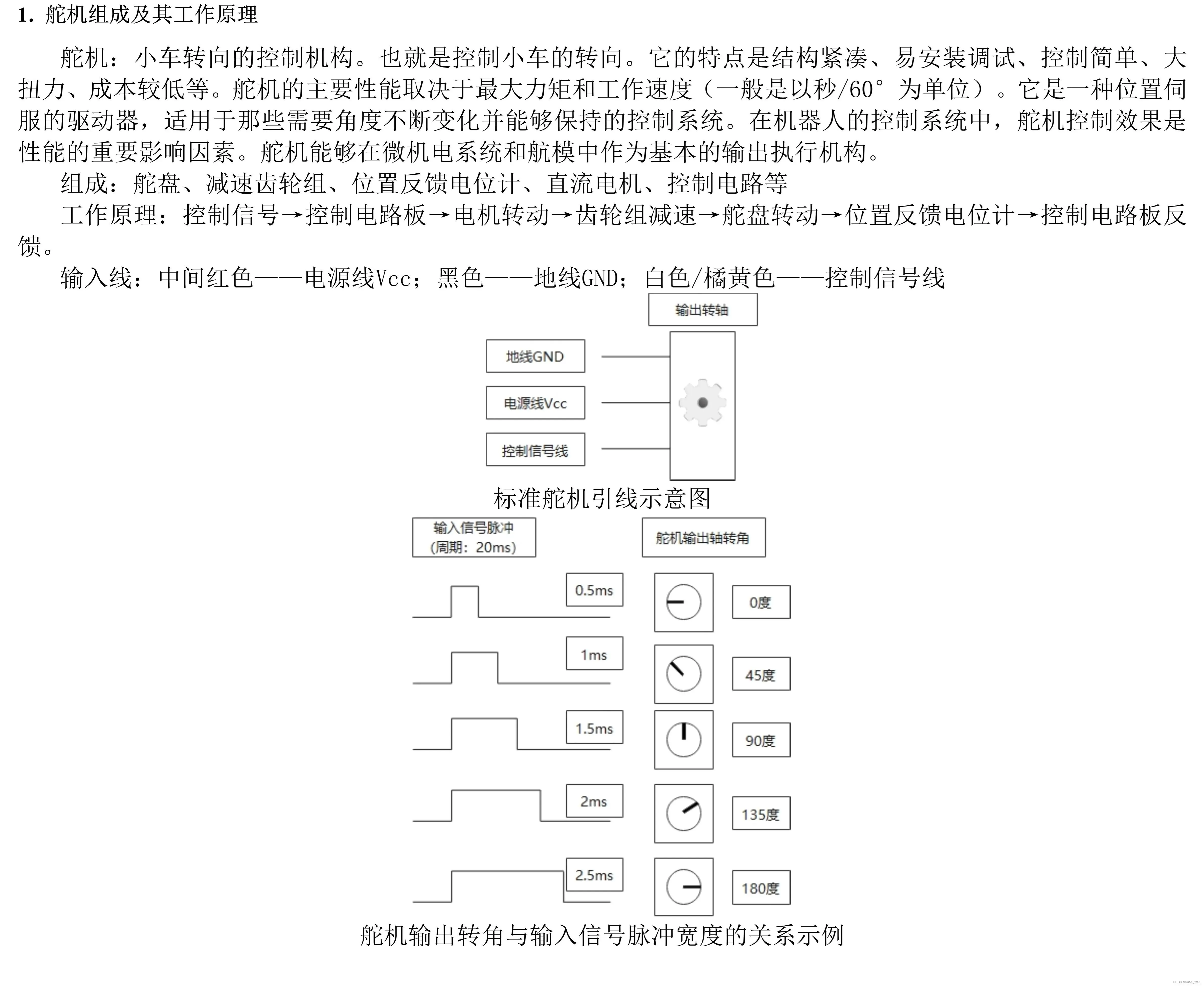
1 舵机组成及其工作原理
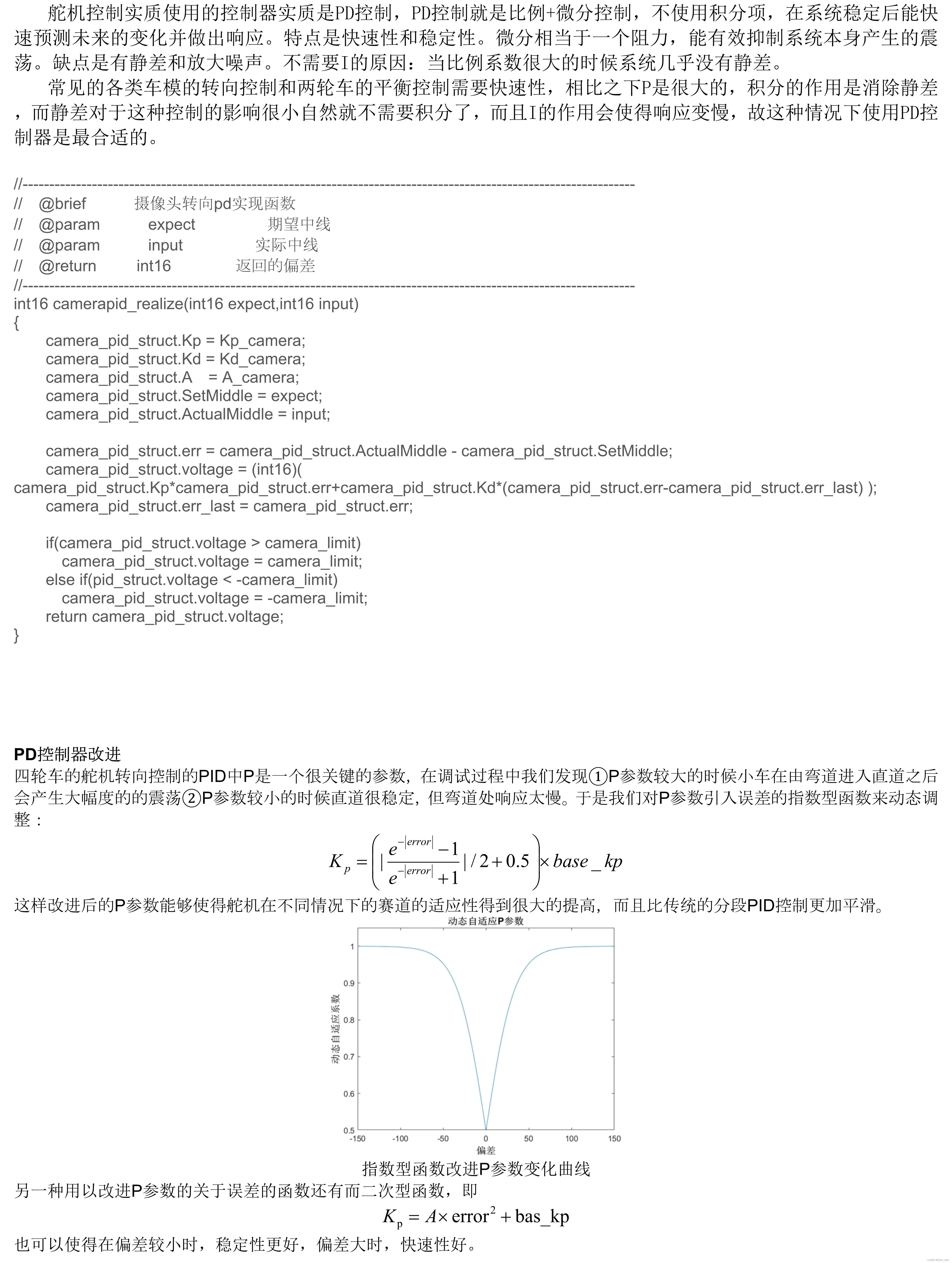
2 舵机PID控制策略
四、 直流电机调速
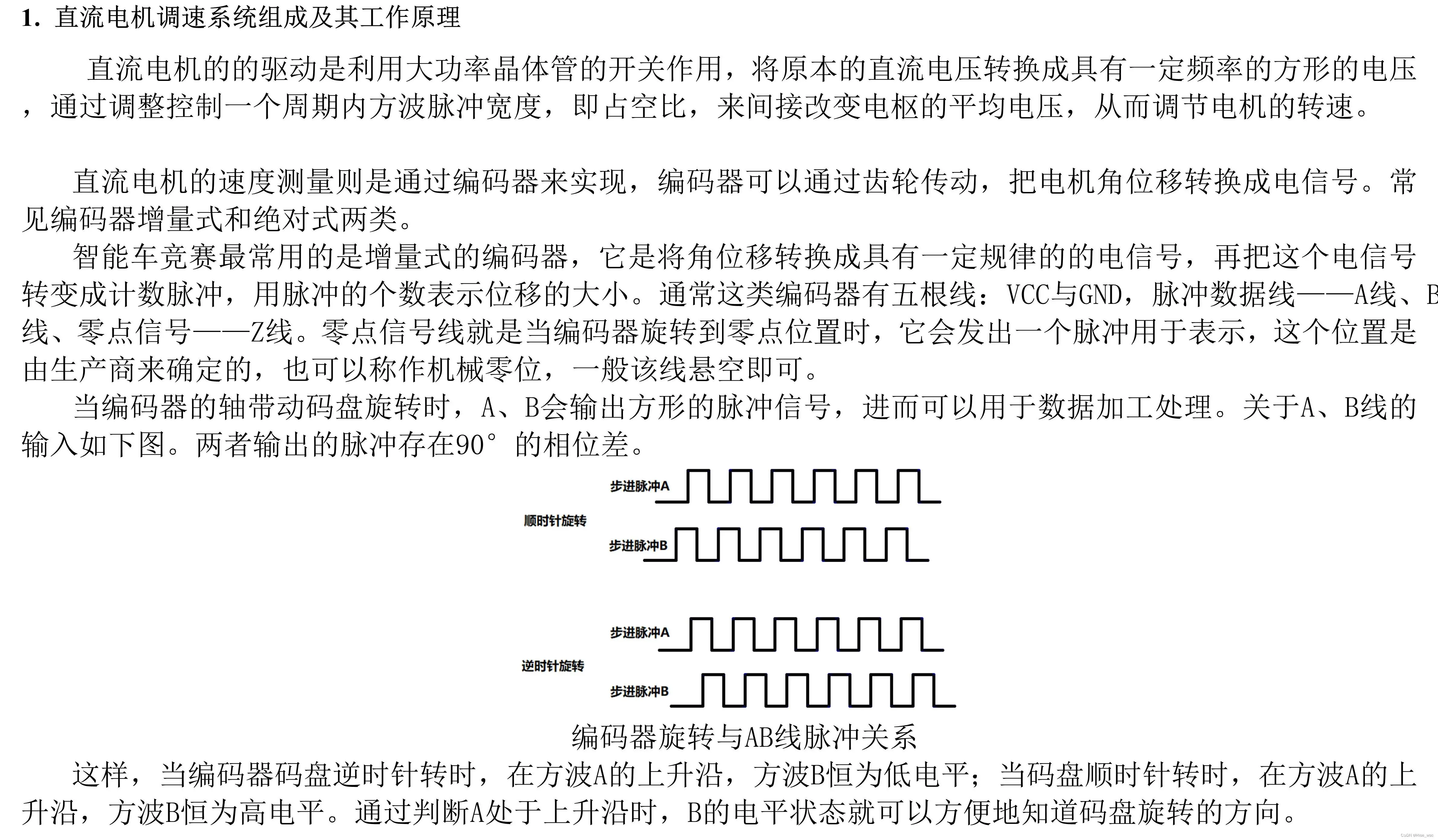
1 直流电机调速系统组成及其工作原理
2 电机PID控制策略
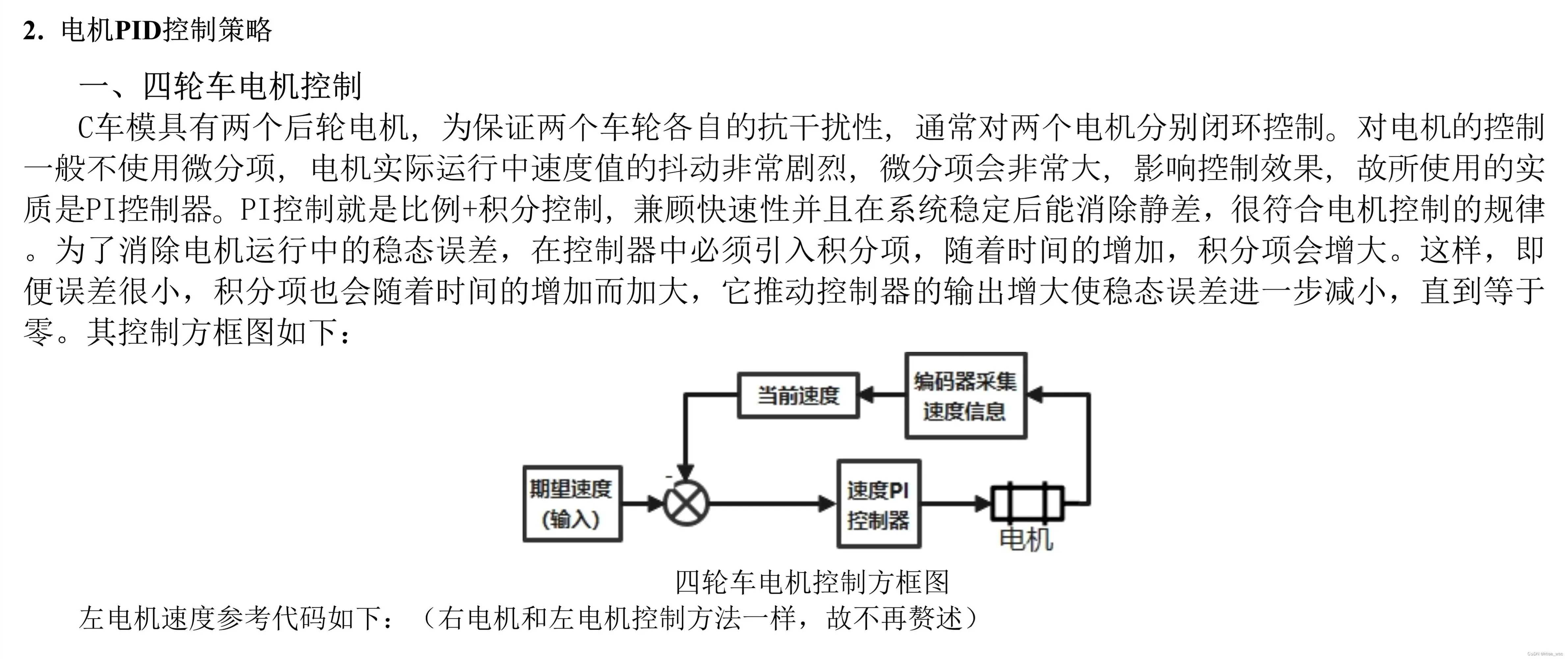
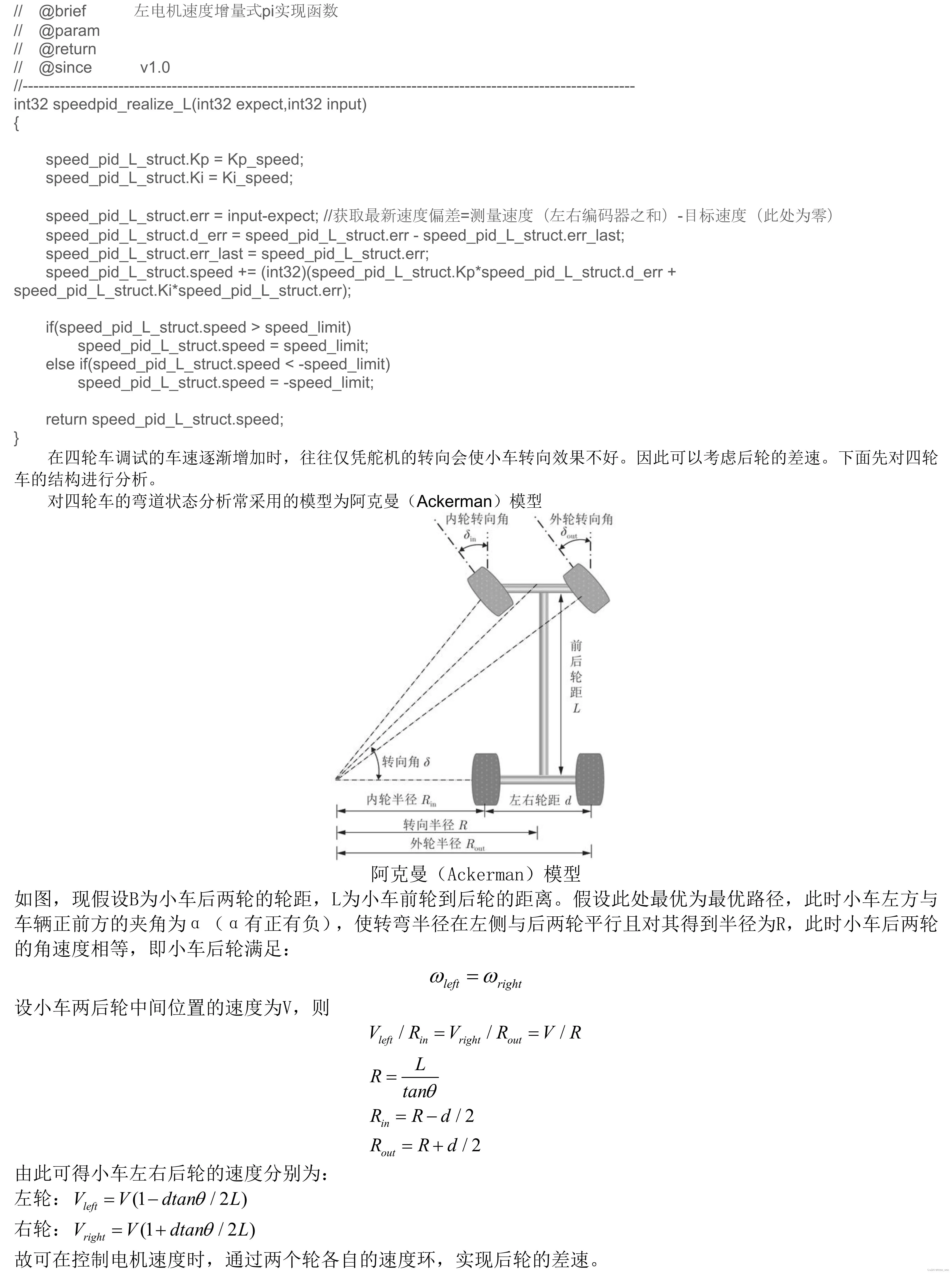
一、四轮电机控制
二、两轮平衡车与三轮车的电机控制
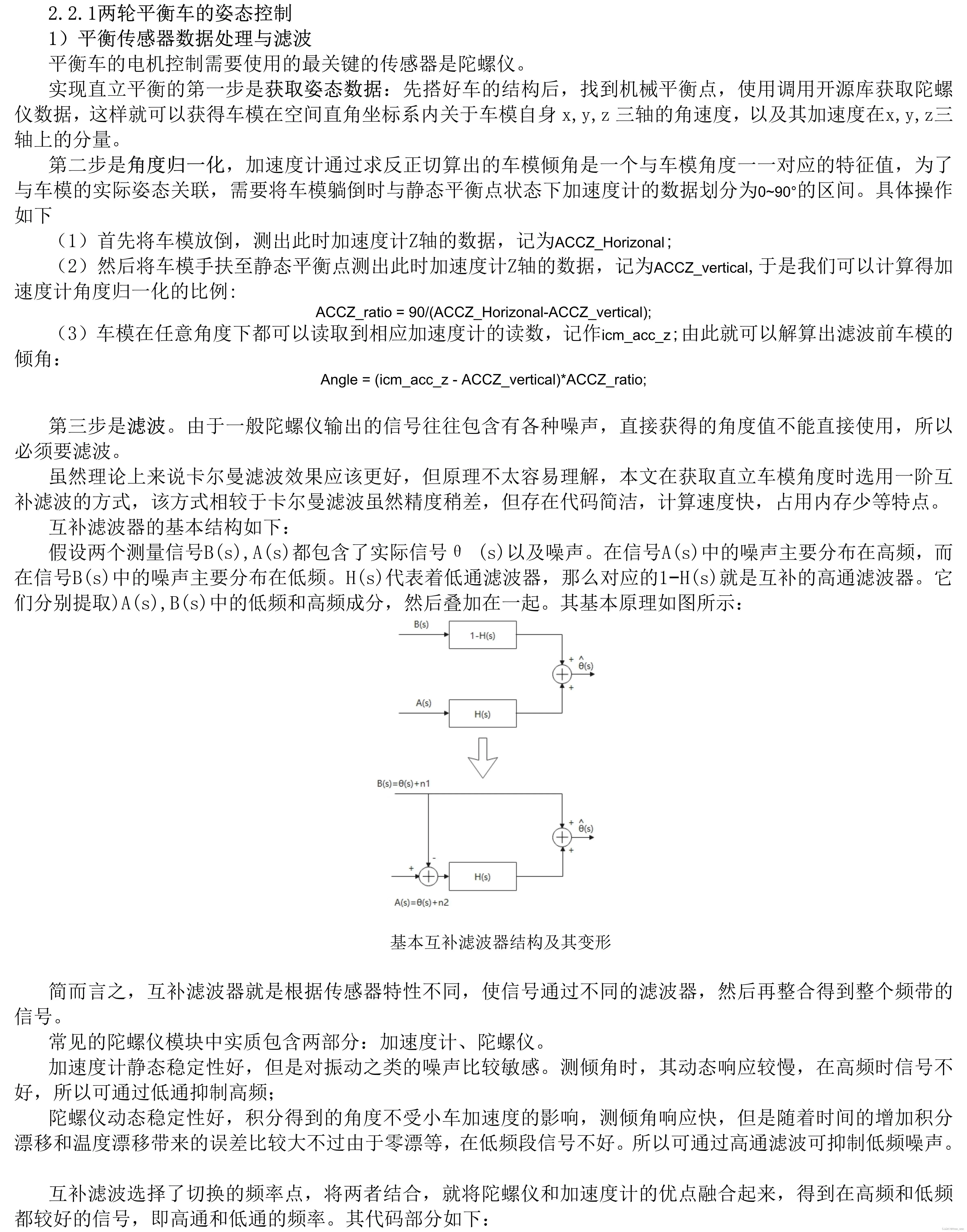
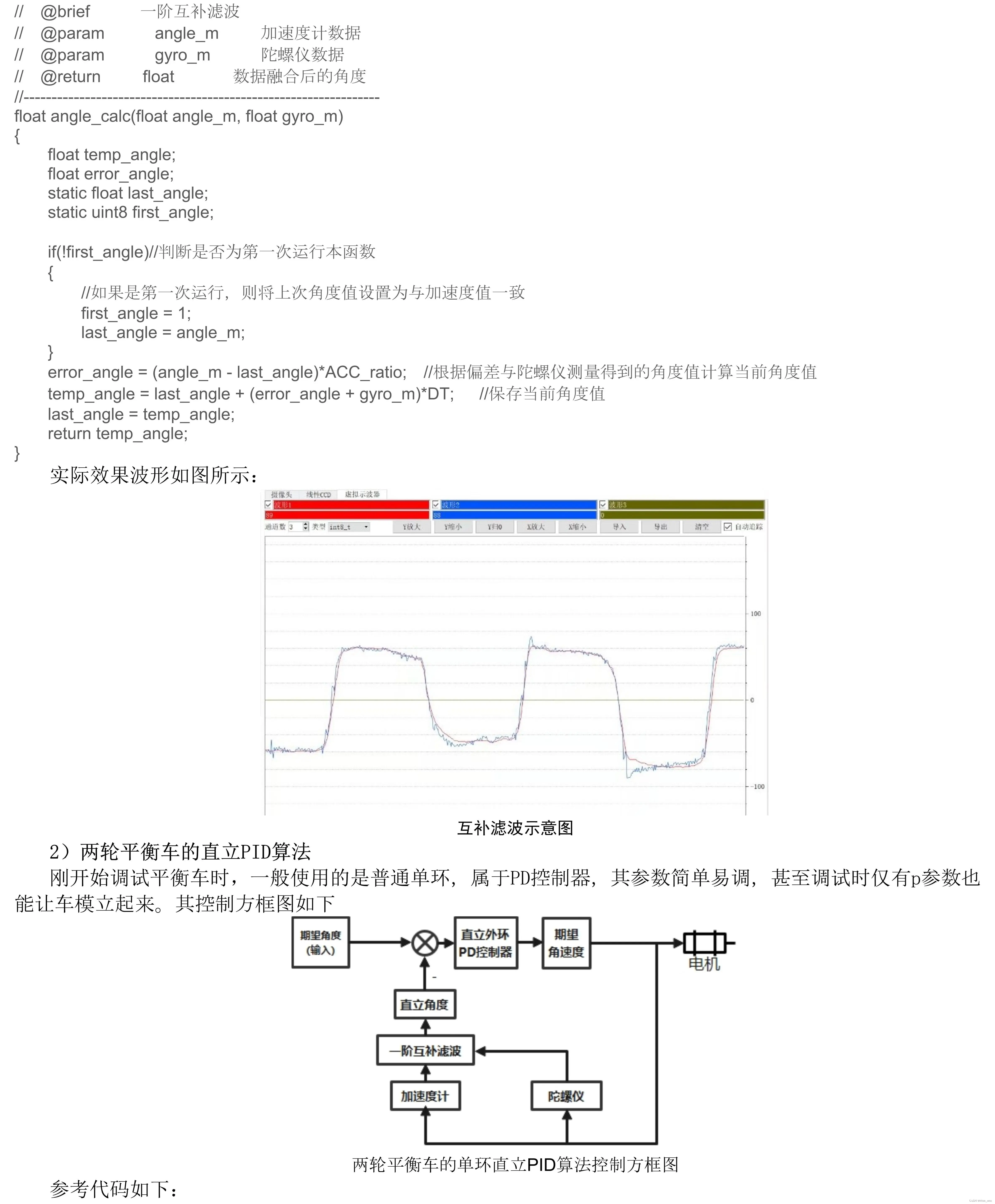
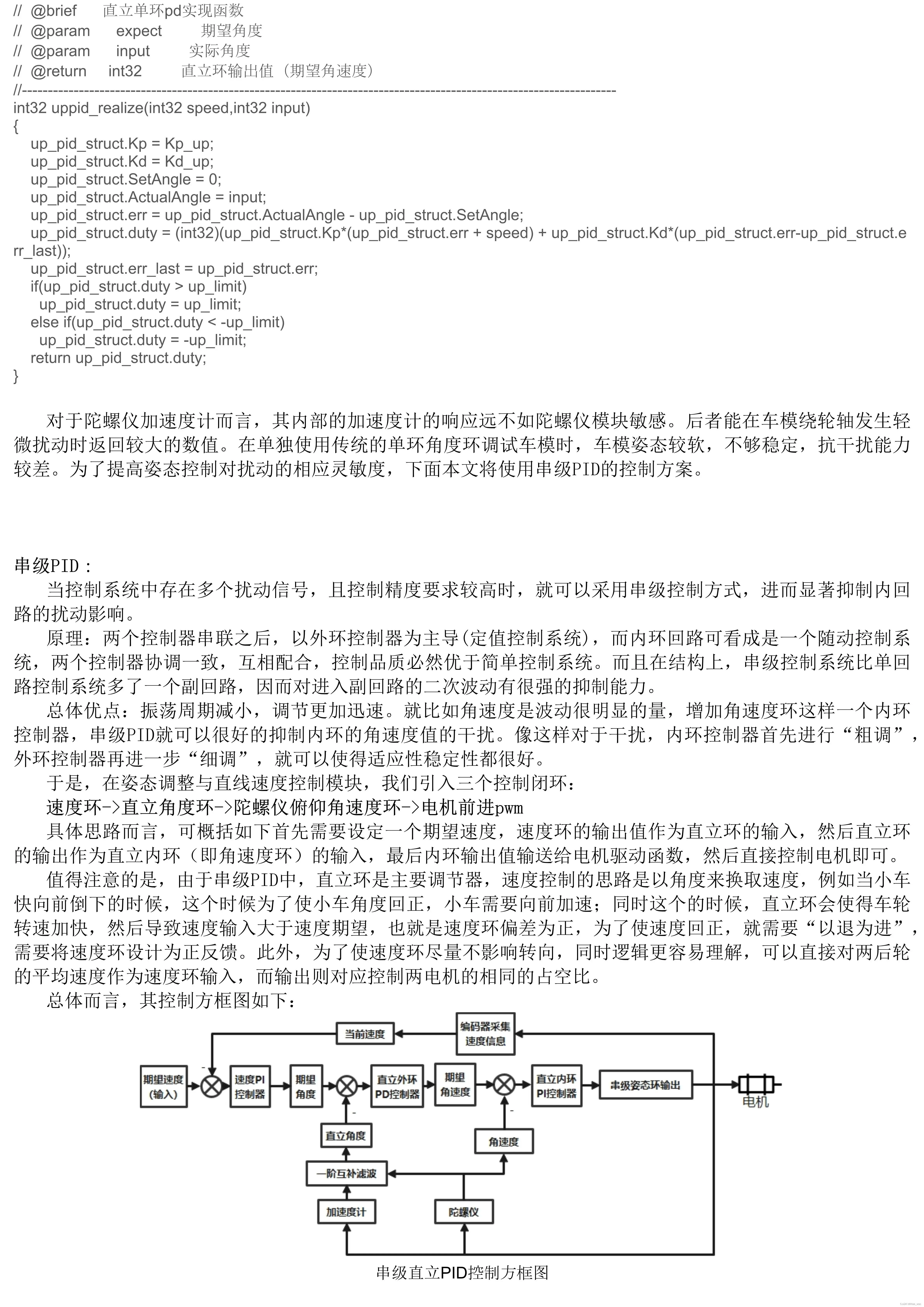
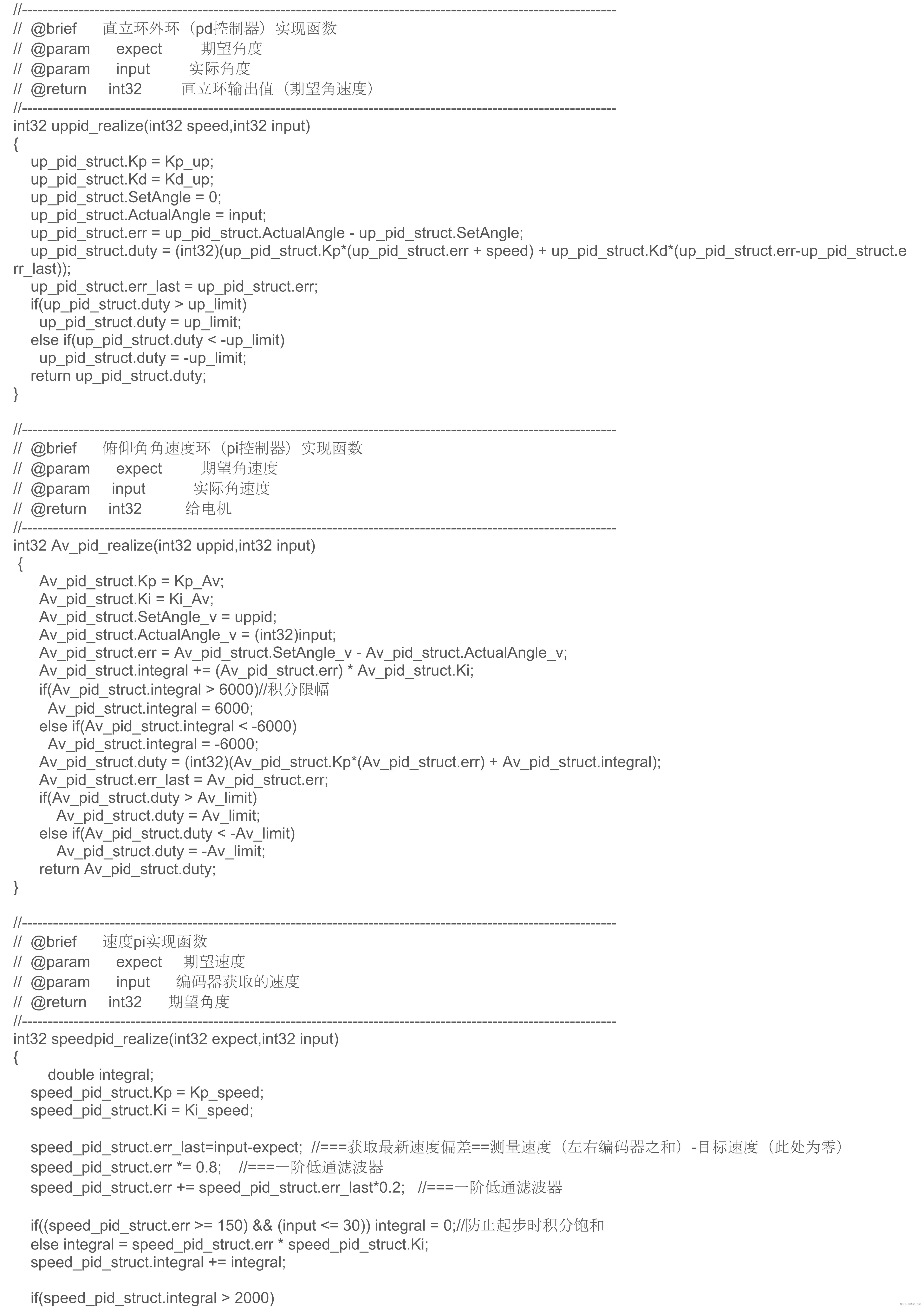
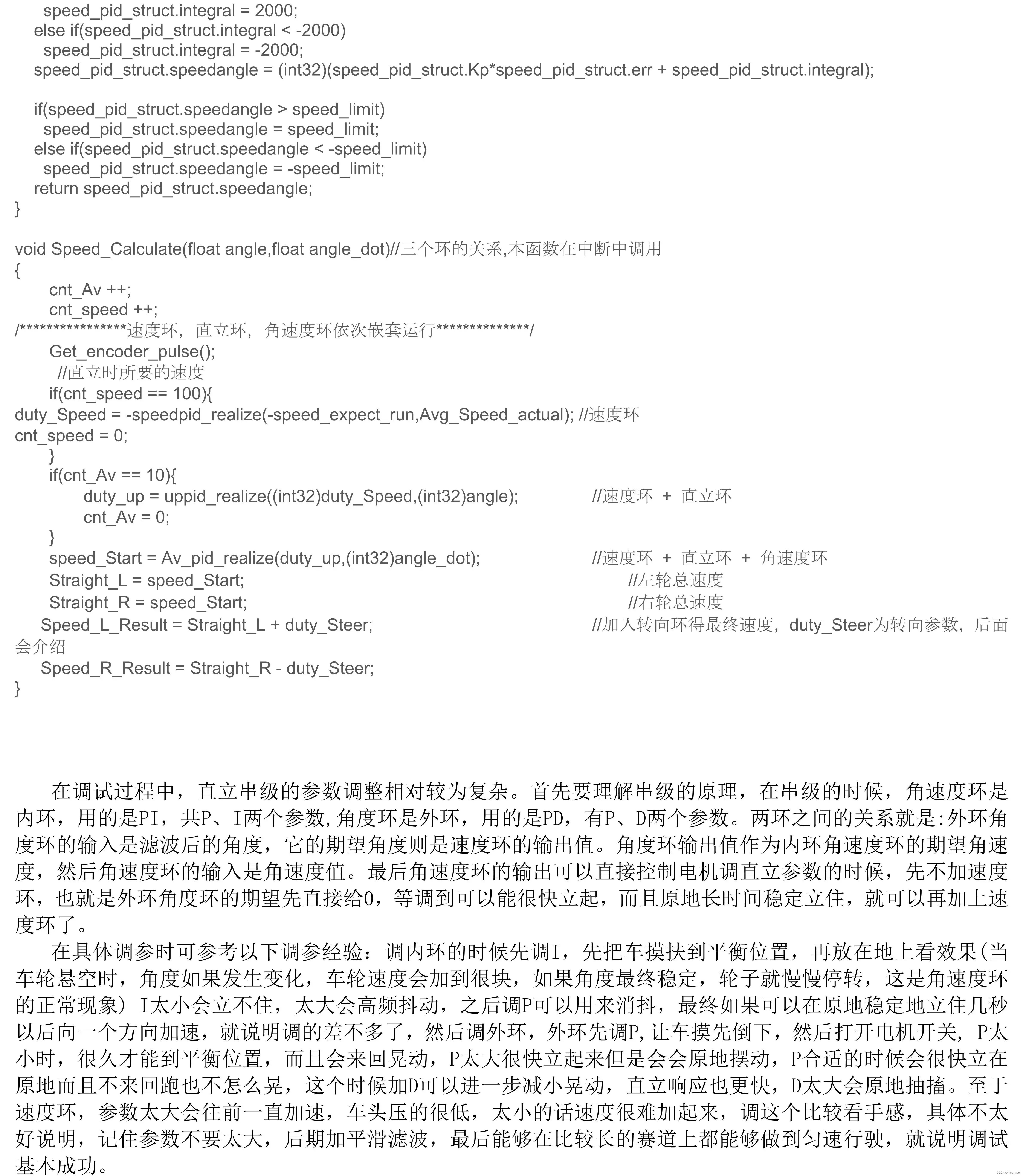
①两轮平衡车的姿态控制(串级PID)
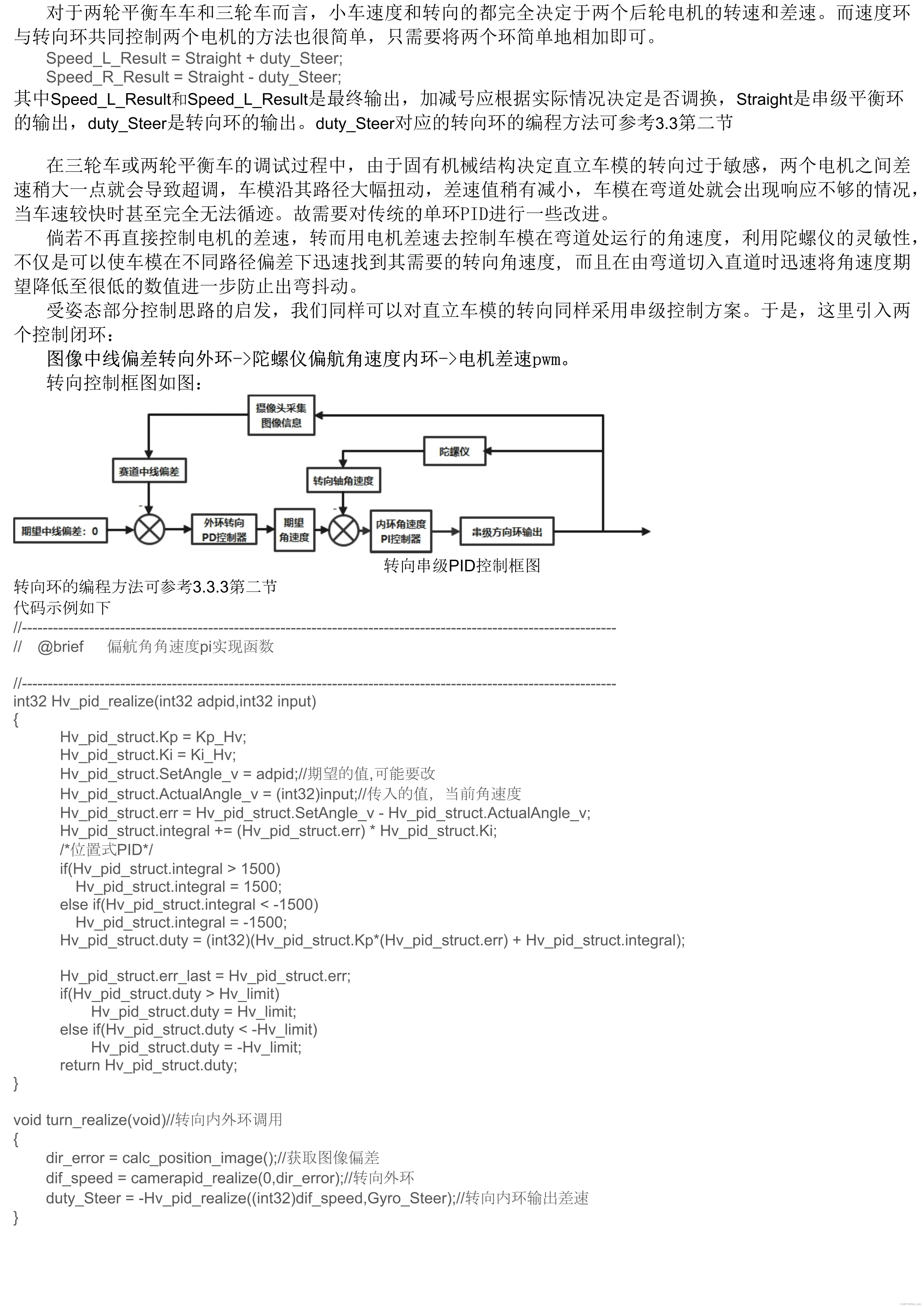
②两轮平衡车与三轮车的转向控制
本文未经允许严禁转载
\color{red}{本文未经允许严禁转载}
本文未经允许严禁转载
声明
本文内容仅代表作者观点,或转载于其他网站,本站不以此文作为商业用途
如有涉及侵权,请联系本站进行删除
转载本站原创文章,请注明来源及作者。