在 Qt Creator 上创建 ROS 项目并新建/导入 ROS 包
YMGogre 2024-06-16 17:35:02 阅读 89
0、引言
⚠️ 在开始之前,您需要确保您已经为 Qt 配置好了 ROS 开发环境了。如果您还没有配置好,可以参考这篇文章
本文将着手探讨如何在 Qt Creator 上编辑 ROS 项目(工作空间)。
1、本教程使用到的相关软件或产品
Ubuntu 20.04.6 LTSROS Noetic Ninjemys LTSQt 6.2.4 LTSQt Creator 10.0.12、在带有 ROS 插件的 Qt Creator 中编辑 ROS 项目
2.1、Qt Creator 新建 ROS 工程
在(零)基础概念篇介绍 ROS 工作空间 时曾说过 “最顶层的工作空间文件夹(可以任意命名)和 src 文件夹(必须命名为"src")是需要自己创建的”。那么我们先创建如下的文件目录:
workspace #在用户目录(~)新建一个“workspace”专门用于存放ROS工作空间└── catkin_ws1 #这是ROS工作空间文件夹,名字自拟 └── src #创建一个一级目录“src”文件夹
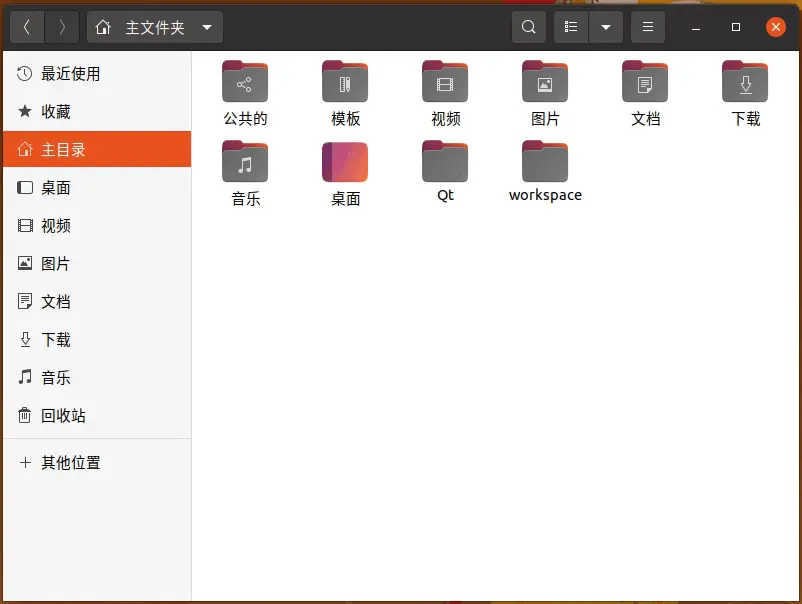
文件目录创建完成后,打开 Qt Creator,点击左上角 “文件”==>“New Project” 新建项目,在 “其他项目” 分区中找到 “ROS Workspace” 新建一个 ROS 工作空间:
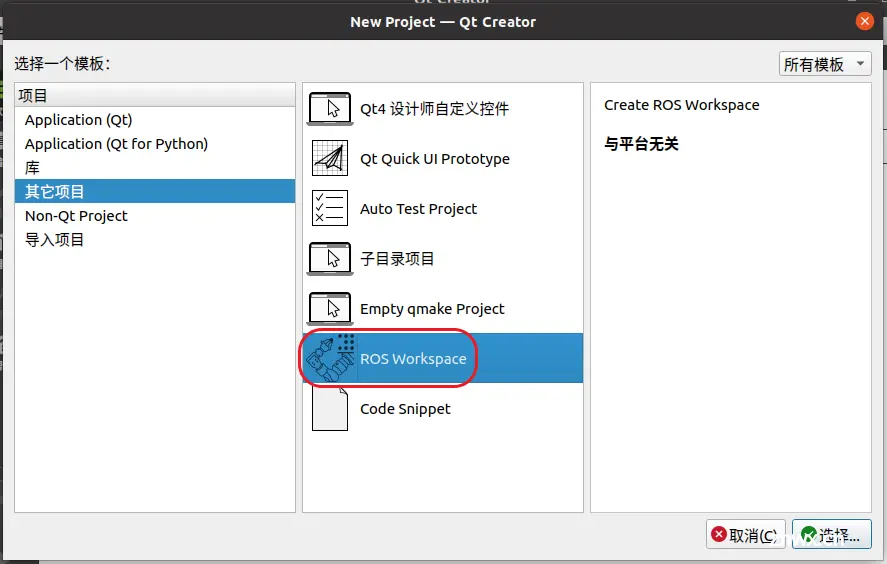
在弹出的对话框中,我们需要为项目命名并选择工作空间的路径,随后点击下一步:
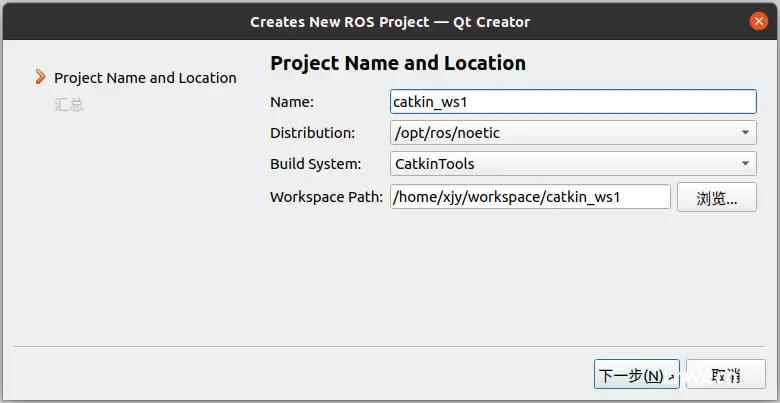
| 项 | 描述 |
|---|---|
| Name | Qt Creator 中 ROS 项目显示的名字,建议与我们创建的工作空间文件夹名称保持一致 |
| Distribution | ROS 发行版路径 |
| Build System | 构建系统。不出意外的话有三个可选项:①CatkinMake(就是 Catkin);②CatkinTools;③Colcon;任选一个即可,它们都可以用来构建和管理 ROS 软件包,笔者直接按默认使用 CatkinTools(当然最稳妥的还是选择第一个 —— CatkinMake) |
| Workspace Path | 工作空间目录 |
下一步来到“汇总”页面,如果不打算添加到版本控制系统的话就可以直接点击 “完成” 了:
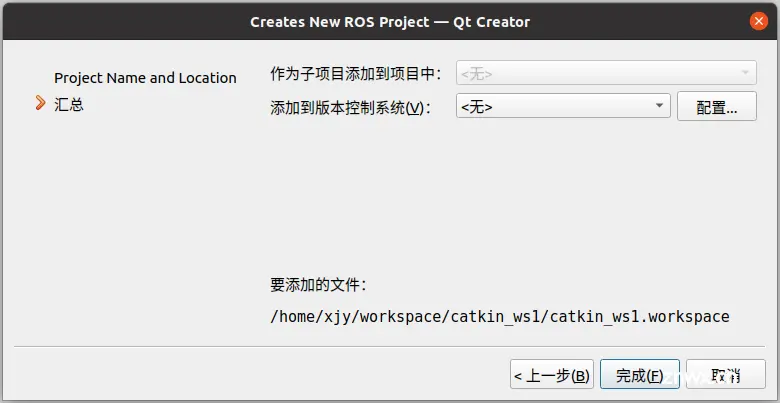
可以看到,创建 ROS 项目只会添加后缀为 .workspace 的 XML 文件,这个文件包含了 Qt Creator 中用于管理 ROS 工作空间的配置信息和设置,可以用于在 Qt Creator 中方便地打开和编辑 ROS 工作空间。
💬 XML 文件不一定要用 .xml 作为文件后缀,文件后缀名只是一种帮助用户和计算机识别文件类型的方式,它并不影响文件的内容或格式。因此,XML文件可以使用任何后缀名,只要它遵循XML语法规则即可。同理,同为轻量级标记语言的 JSON、YAML、TOML 也是如此
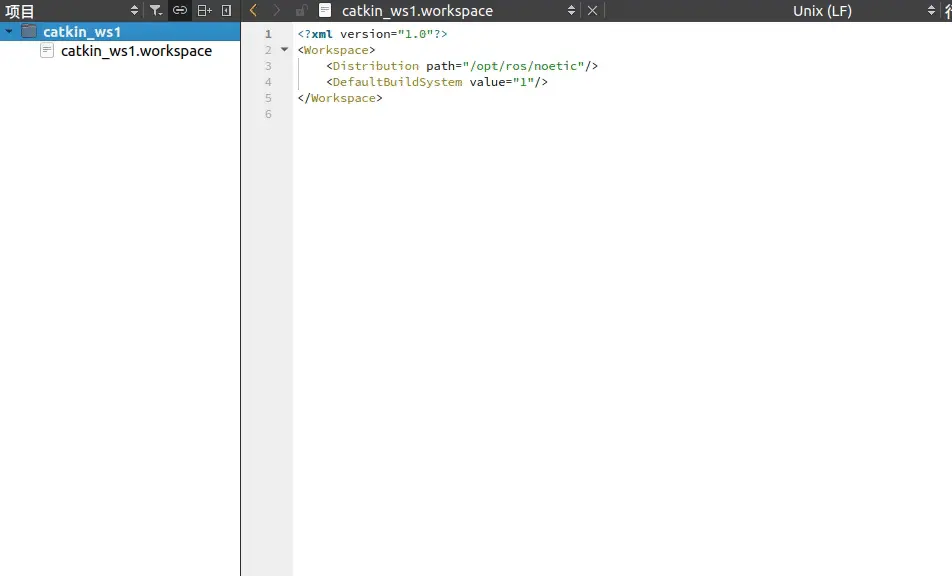
创建 ROS 项目完成后,可以看到如下图所示的目录结构:
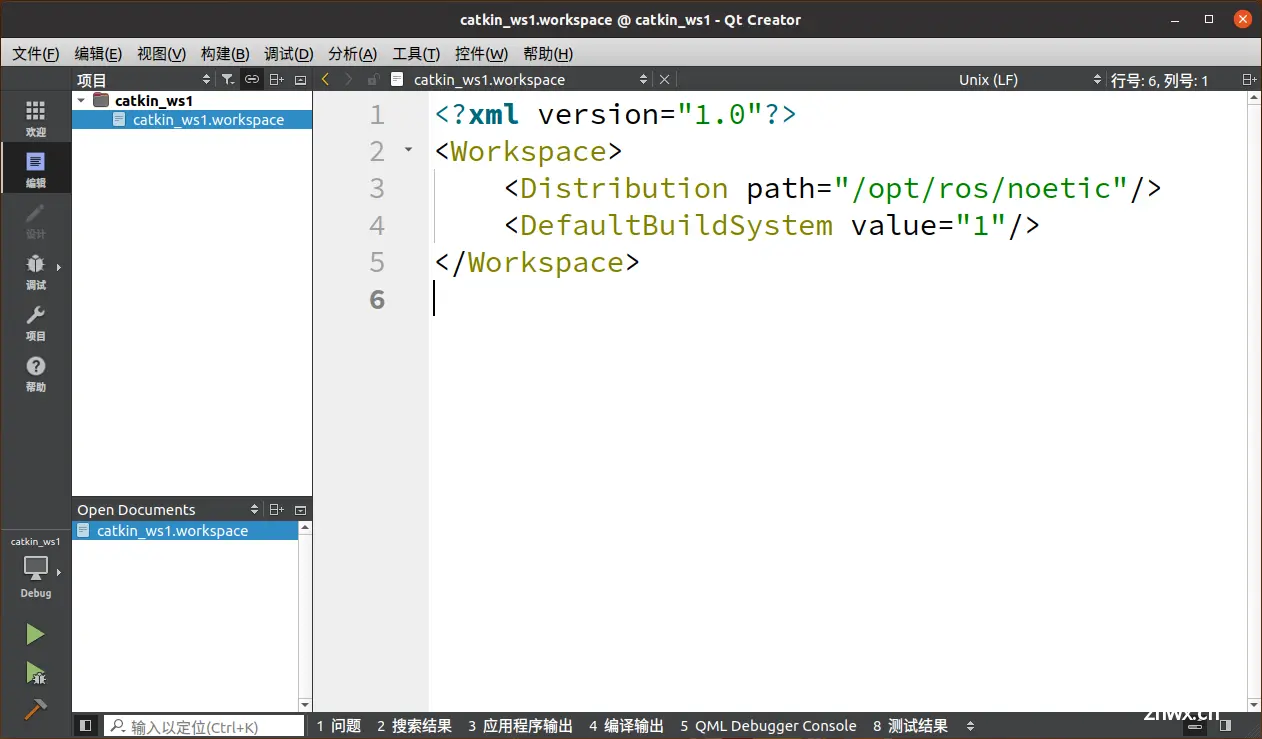
可以看到 .workspace 文件内容其实很简单:一是指定了 ROS 发行版的文件路径;二是指定了默认的构建系统为我们刚才选择的 CatkinTools。
刚才我们选择构建系统是用一个下拉框选择的,而下拉框中的每一项都是有索引的,从0开始。我们选择的 CatkinTools 是第二项(索引为1)。
完成 ROS 项目创建后,如果我们此时关闭该项目,则可以看到除了 .workspace 文件,Qt Creator 还会自动创建一个与 .workspace 文件同名的后缀为 .workspace.user 的 XML 文件,用于存储与 ROS 工作空间相关的用户特定设置和配置。
.workspace.user 文件只包含用户的设置,而不包含 Qt Creator 用于管理 ROS 工作空间的配置信息。因此,如果我们想分享 ROS 项目,只需要分享 .workspace 文件,而不需要分享 .workspace.user 文件。
2.2、Qt Creator 创建的 ROS 工程导入现有 ROS 软件包
如果您还没有现成的 ROS 包,您可以前往笔者的 Github 仓库下载。
(下载下来的压缩包解压后可以把文件夹名称中的“-master”删除)

由于我们创建 ROS 工程时选择的构建系统是 CatkinTools,Ubuntu 20.04 没有自带这个工具,我们需要先下载安装它:
首先同步源:
sudo apt-get update
然后安装 catkin_tools 包:
sudo apt-get install python3-catkin-tools
此外由于我们现有的 ROS 包用到了 ROS 的地图服务(map_server)包,但 ROS Noetic 并没有自带这个包,我们需要先安装这个包:
首先同步源:
sudo apt-get update
然后安装 map_server 包:
sudo apt-get install ros-noetic-map-server
安装完 map_server,还是接着新建 ROS 工程的内容。ROS 工程创建完成后,我们前往 ROS 工程的 src 文件夹下粘贴我们现有的 ROS 包:
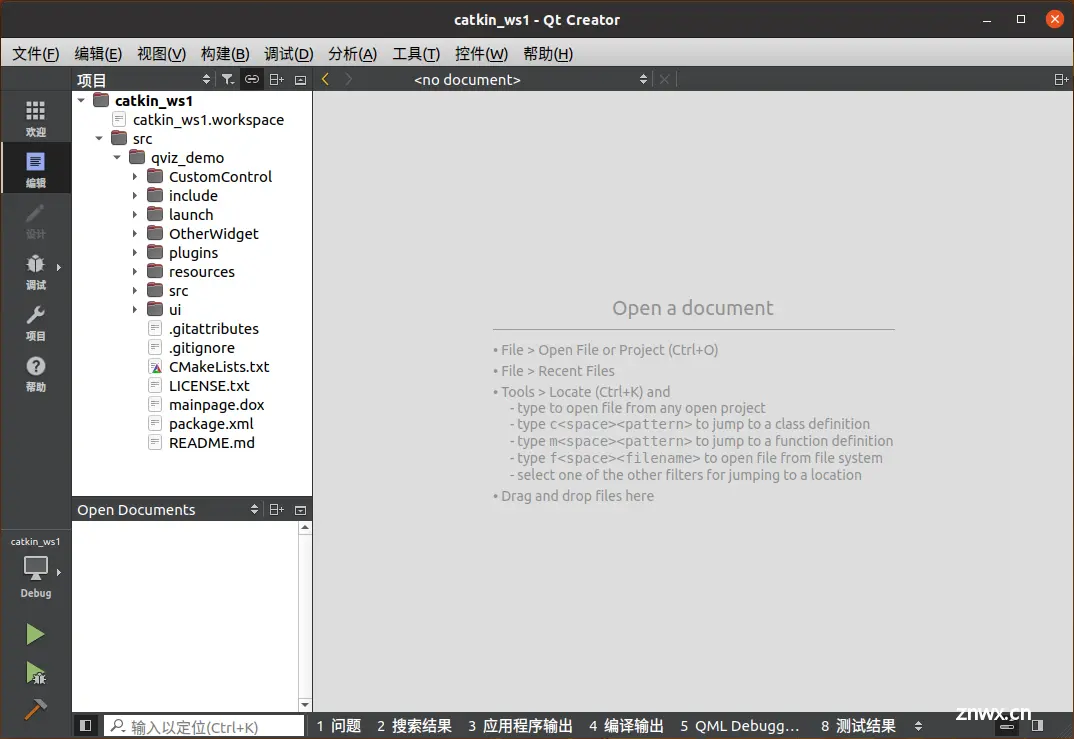
随后回到 Qt Creator,关闭并重新打开项目,Qt Creator 会花一点时间自动构建该软件包,耐心等待即可,完成后如下图所示:
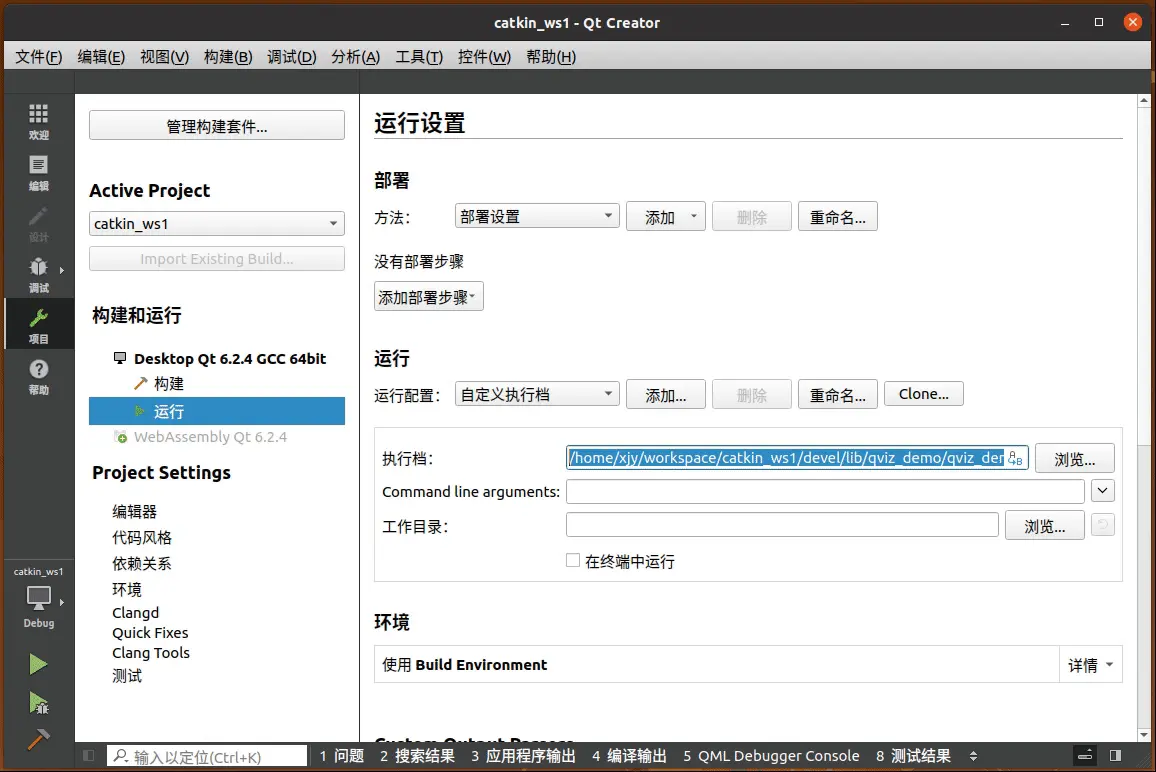
接着前往 “项目”>“构建和运行”>“运行”==>“执行档” 指定软件的可执行文件所在路径:
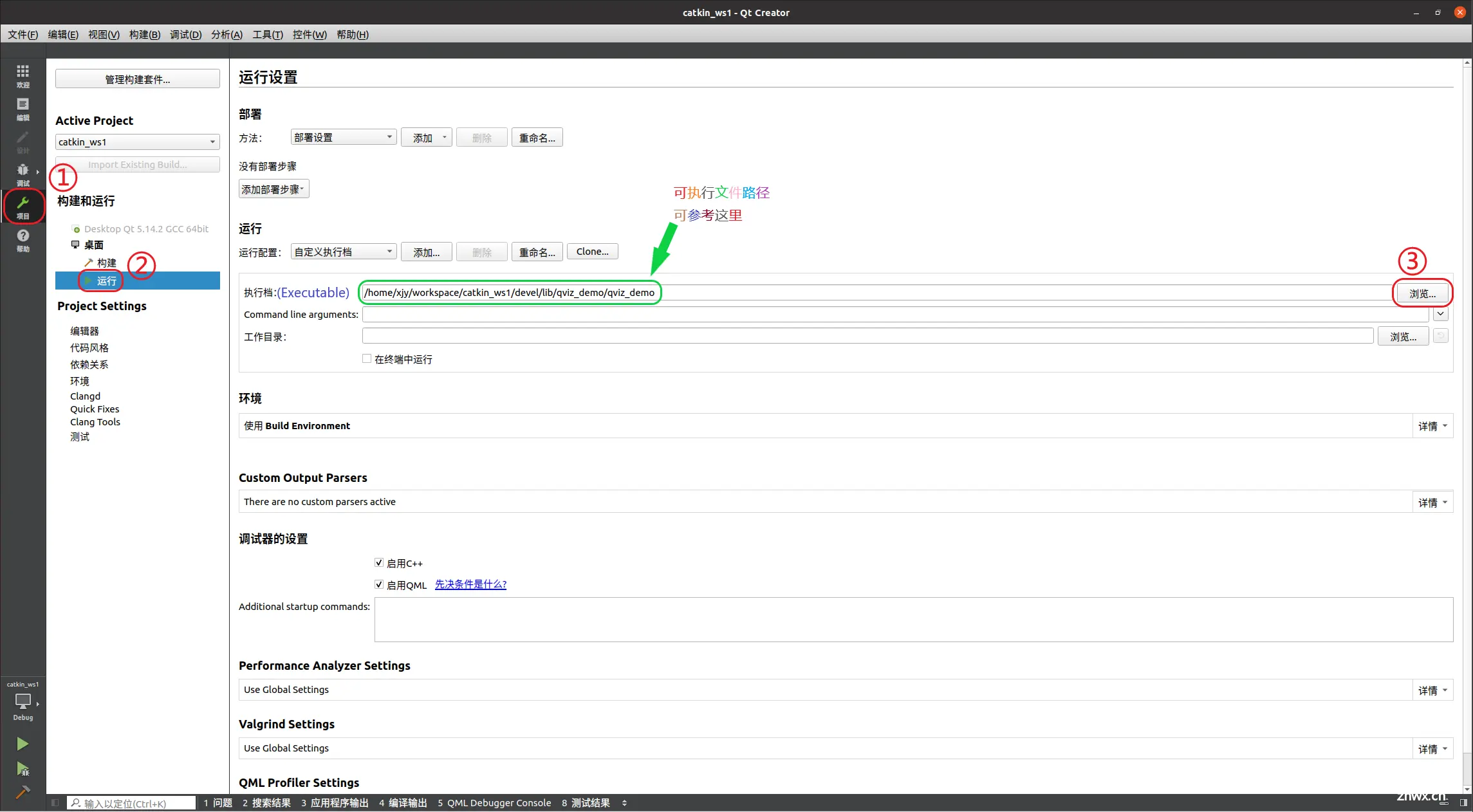
可执行文件一般在 “devel”(开发空间)>“lib”>(与我们导入的 ROS 包同名的那个文件夹)下。
以本文提供的 ROS 包为例,可执行文件的绝对路径为:
/home/xjy/workspace/catkin_ws1/devel/lib/qviz_demo/qviz_demo
在(零)基础概念篇介绍 ROS Master 时曾介绍过“ROS Master 为 ROS 系统中的其余节点提供命名和注册服务”(在 ROS 中,一个应用程序进程表现为一个 ROS Node)。所以在运行我们的 ROS 软件之前,我们需要先启动 ROS Master:
在 Ubuntu 桌面使用 ctrl+alt+T 快捷键打开一个终端,然后使用 roscore 命令启动 ROS Master,如下图所示:
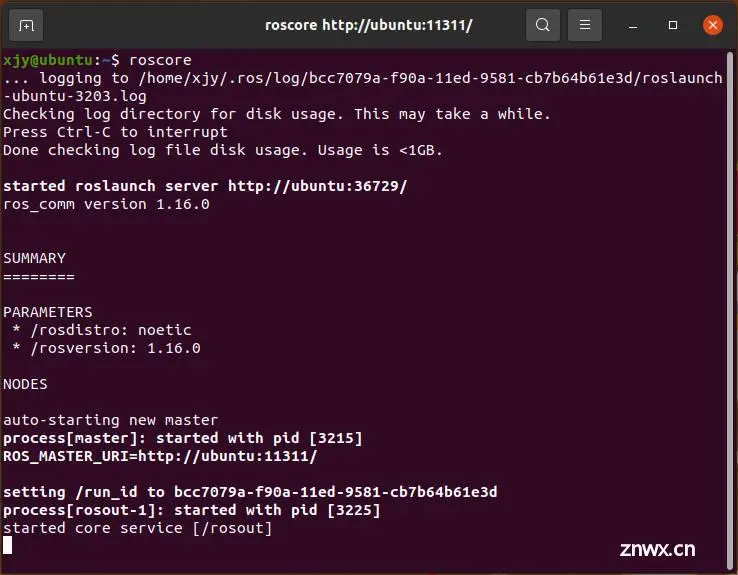
完成后,就可以愉快地运行我们的 ROS 软件啦~
(由于我们是在本机上运行的 roscore,所以这里我们 ROS Master 的地址即回环地址)
2.3、Qt Creator 创建的 ROS 工程新建 ROS 软件包
如果我们没有现有的 ROS 软件包,那么这个时候可能就需要我们自己新建软件包了。使用 ros_qtc_plugin 插件新建 ROS 包只会添加两个文件:CMakeLists.txt 和 package.xml,这也是任何 ROS 功能包都必须包含的两个文件。其中 CMakeLists.txt 文件用于描述构建过程和依赖关系等内容;package.xml 用于描述软件包的名称、版本号、描述信息、邮件地址、作者、许可证以及其他 catkin 包依赖关系等内容。
由于笔者水平及时间有限,就并没有研究如何从新建一个 ROS 软件包到添加各种源码并成功运行的全过程;这里仅演示如何新建 ROS 包,更多内容还请感兴趣的读者自行摸索了。
由于我们创建 ROS 工程时选择的构建系统是 CatkinTools,Ubuntu 20.04 没有自带这个工具,我们需要先下载安装它:
首先同步源:
sudo apt-get update
然后安装 catkin_tools 包:
sudo apt-get install python3-catkin-tools
ROS 工程创建完成后,我们右击项目名称,点击 “添加新文件”:
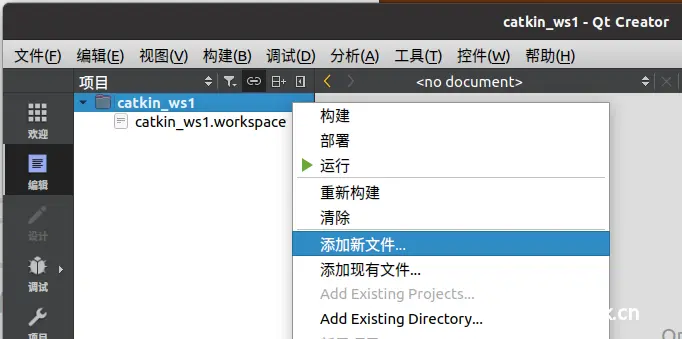
(或者左上角 “文件(F)”==>“New File”)
选择 ROS 分类下的 Package 添加即可:
在 “Package Details” 页面,除了包名称(Name)是必填项,其他所有项都是默认填写有内容或者可忽略不填(后续有需求随时可在 CMakeLists.txt 或 package.xml 内手动添加相应内容):
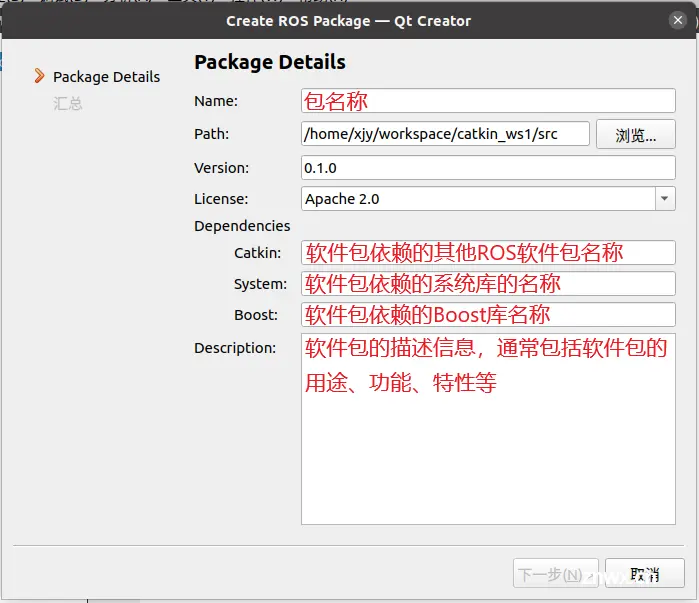
Name:软件包名称,ROS 约定软件包名称应是小写字母 + 下划线(_)分割单词的格式。ROS 软件包名称是其在 ROS 系统中的唯一标识符,因此请确保使用唯一的名称。 Path:软件包的路径,指定软件包的存储位置。通常,ROS 软件包被存储在ROS 工作空间的 src 目录下。 Version:软件包的版本号,用于标识软件包的不同版本。ROS 软件包版本号通常采用 Semantic Versioning 规范,即 major.minor.patch( 主版本号.次版本号.修订号)格式。 License:软件包的许可证类型,用于说明软件包的使用和分发条款。如果对许可证不太了解,可以参考:什么是License?许可证?协议?都有哪些License? - 知乎。 Dependencies/Catkin:ROS 软件包依赖的其他 ROS 软件包的名称,通常在这一栏我们需要填写对roscpp的依赖以使用 ROS 的 C++ 接口。如果想要添加多个依赖,可以使用英文逗号(,)或者空格隔开。 Dependencies/System:ROS 软件包依赖的系统库的名称,通常这一栏可以不填。 Dependencies/Boost:ROS 软件包依赖的 Boost 库的名称(Boost 是一个开源的、免费的 C++ 库集合,包含了大量的高质量、可重用的代码库。Boost 库覆盖了广泛的 C++ 编程领域,包括容器、日期时间、算法、数值计算、多线程、文件系统、正则表达式等方面),通常这一栏可以不填。 Description:ROS 软件包的简要描述,通常包括软件包的用途、功能、特性等。这些信息将在软件包的 package.xml 文件中被包含,并在使用rospack命令或者其他 ROS 工具时显示出来。
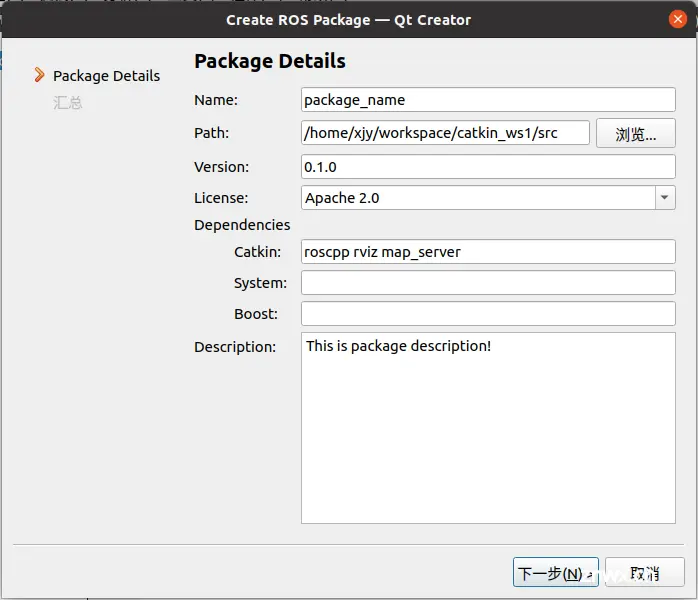
下面是一个 “Package Details” 页面填写完成的实例展示:
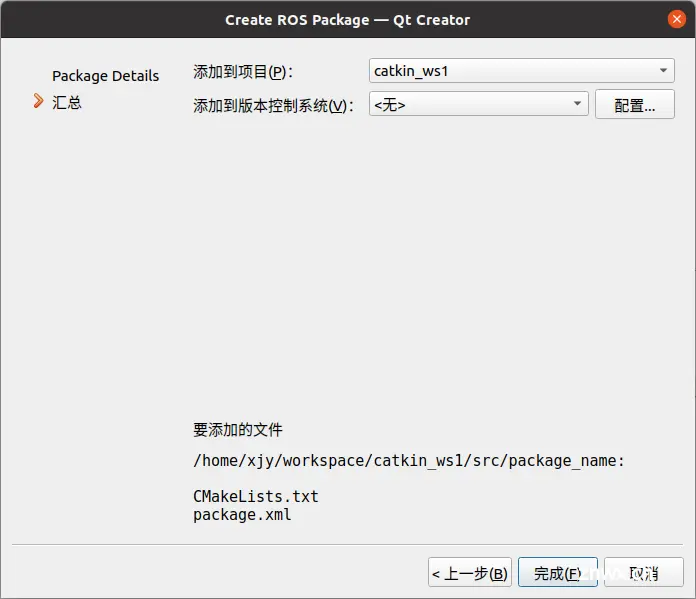
填写完成后,点击 “下一步(N)”。可以确认新建 ROS 包只会添加两个文件(CMakeLists.txt 和 package.xml):
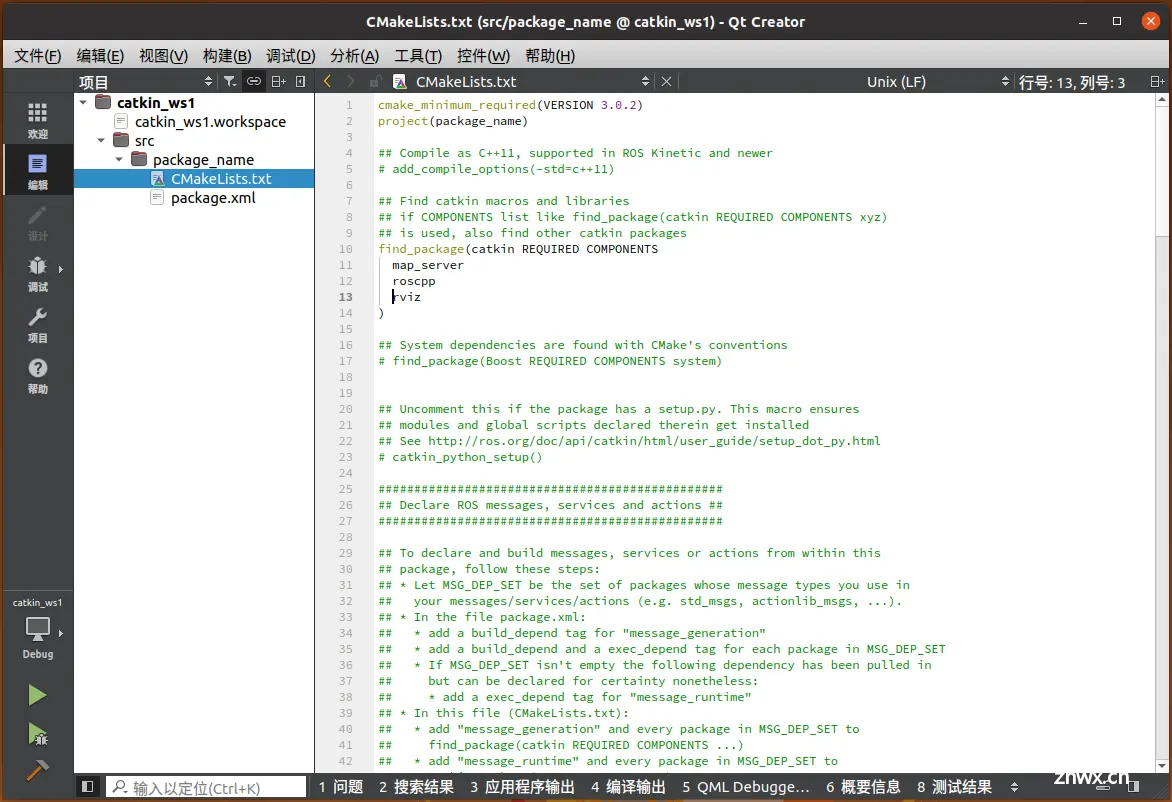
点击“完成(F)” 即可成功向 ROS 工程添加一个新建的 ROS 软件包。完成后如下图所示:
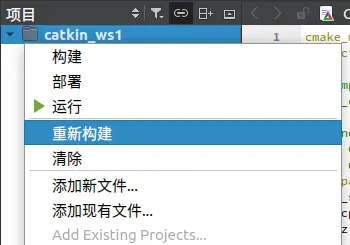
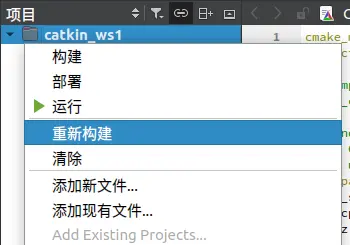
完成后,右击项目名称,点击“重新构建”:
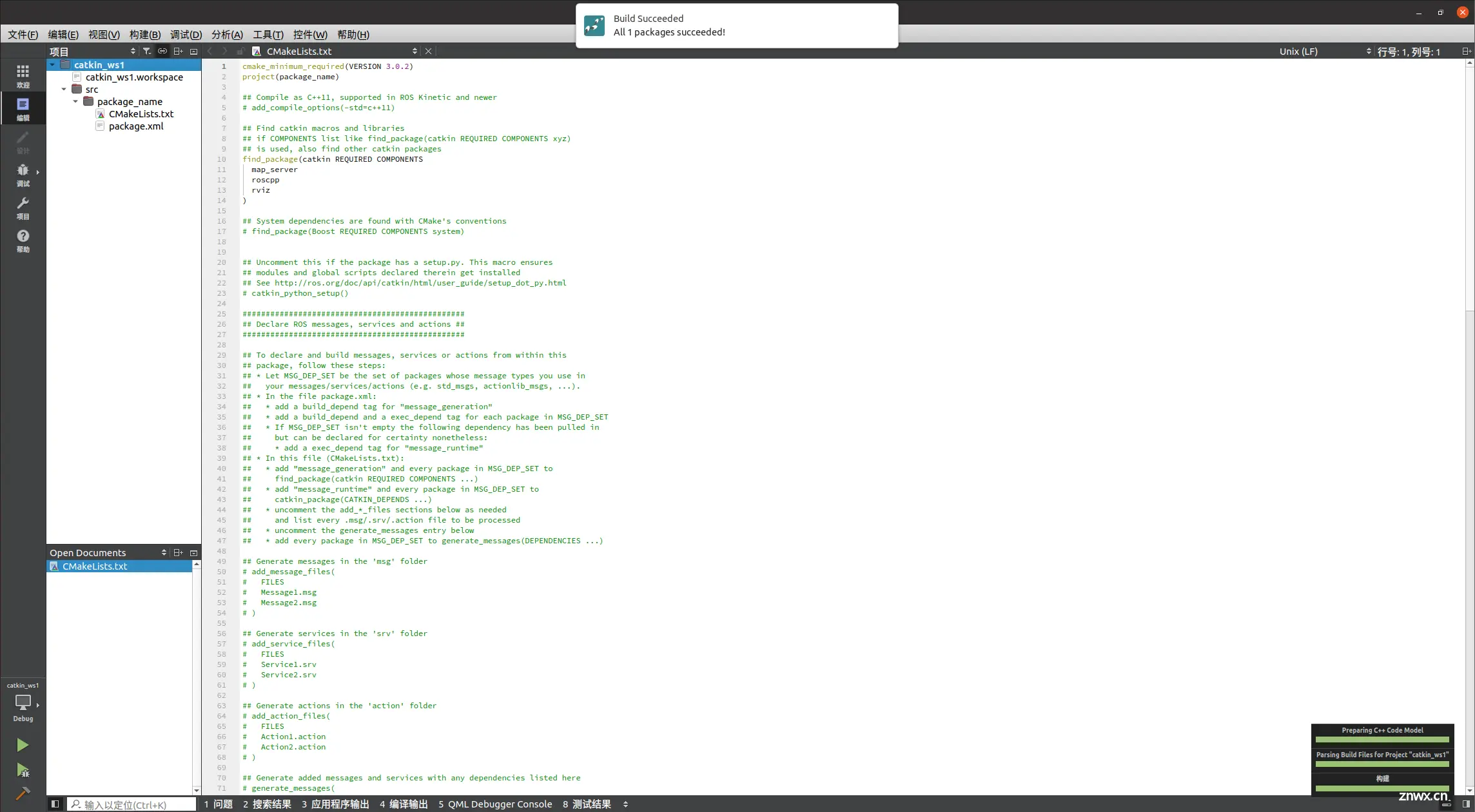
稍等片刻就可以看到项目构建成功的提示,说明我们新建的 ROS 软件包是没有任何问题的:
2.4、在 ROS 软件包中使用 Qt 组件
既然是在 Qt Creator 中编辑 ROS 项目,那怎么能够对在 ROS 软件包使用 Qt 组件不感兴趣呢?♪(´▽`)
下面介绍在 ROS 项目中如何添加对 Qt 各种各样的组件的引用,以便使用这些组件。如果您想要使用 Qt 框架开发基于 ROS 的桌面应用程序,那么请勿错过 2.4 小节。🥰
让我们紧接着 2.3 小节 的内容继续。新建 ROS 软件包并构建成功后,我们点击“项目”==>“构建”,找到 Build Environment 构建环境:
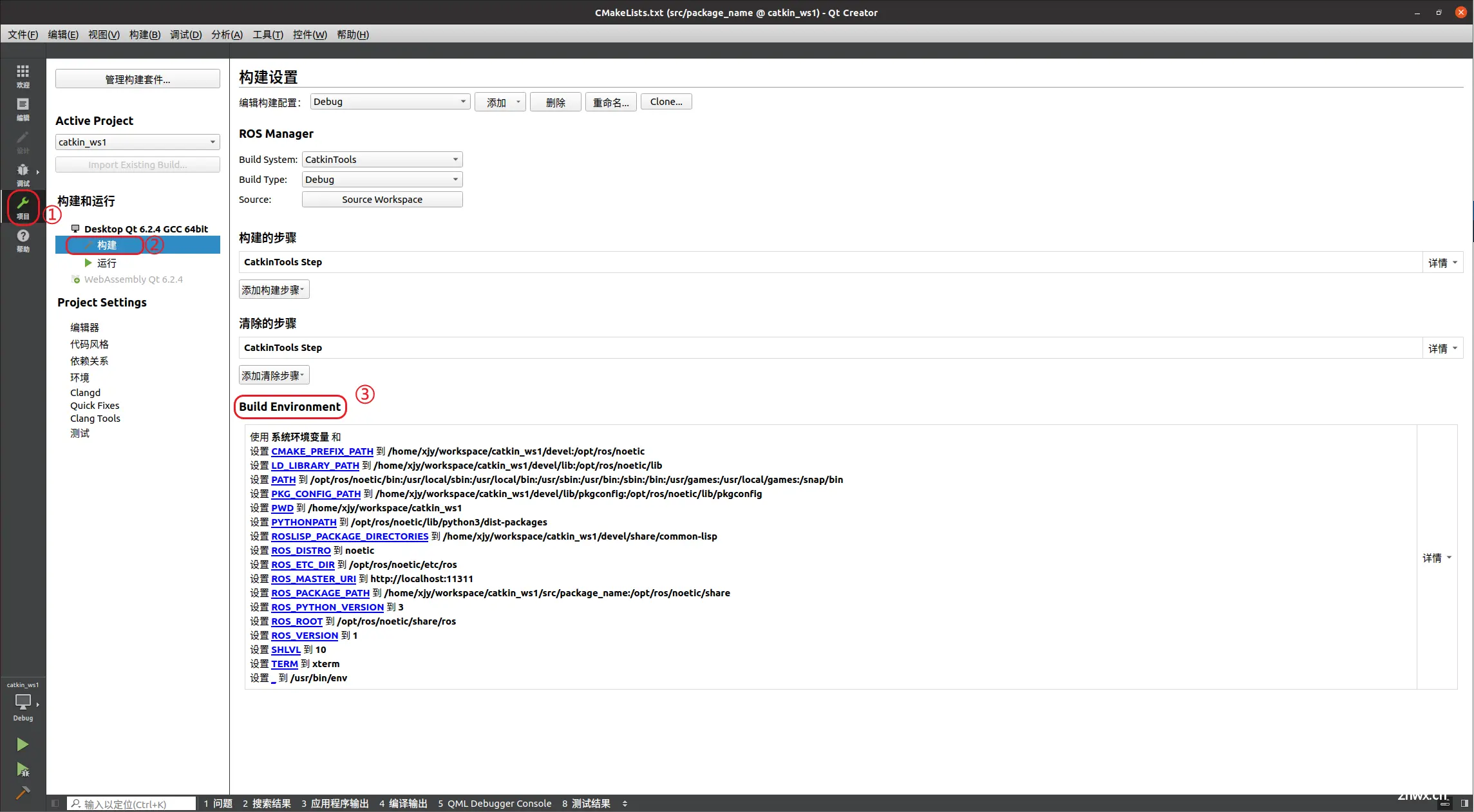
可以看到 ROS 项目是重新设置了 CMAKE_PREFIX_PATH 的:
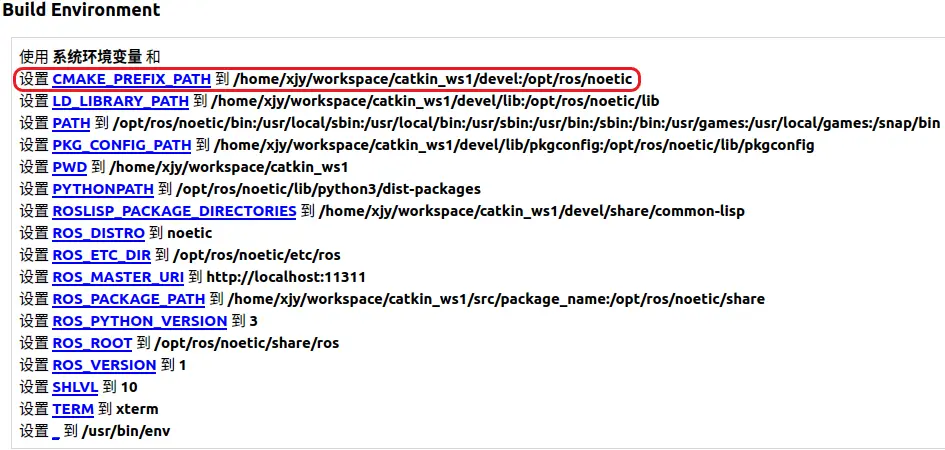
什么是 CMAKE_PREFIX_PATH?
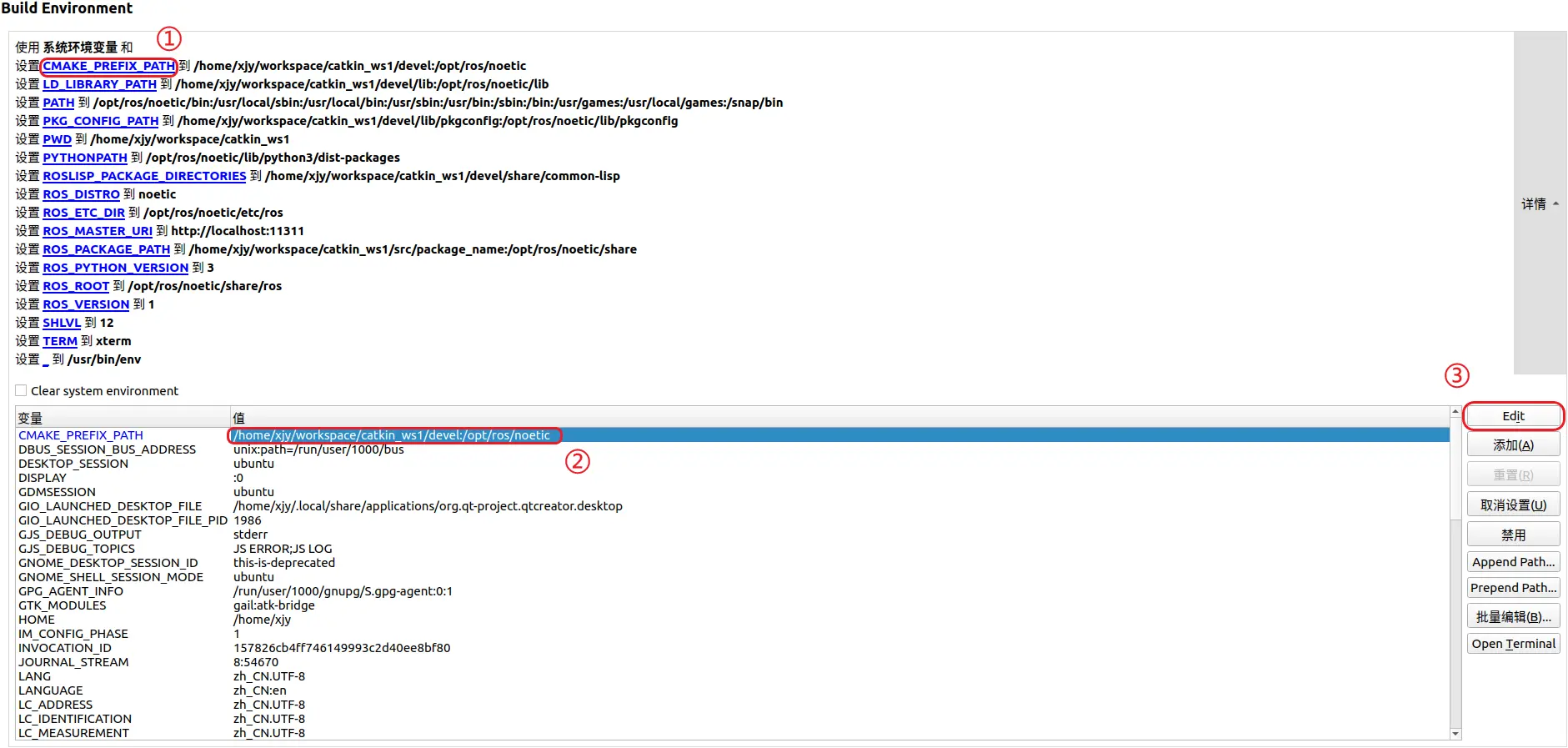
点击该环境变量,选中其值,并点击右方的“Edit”:
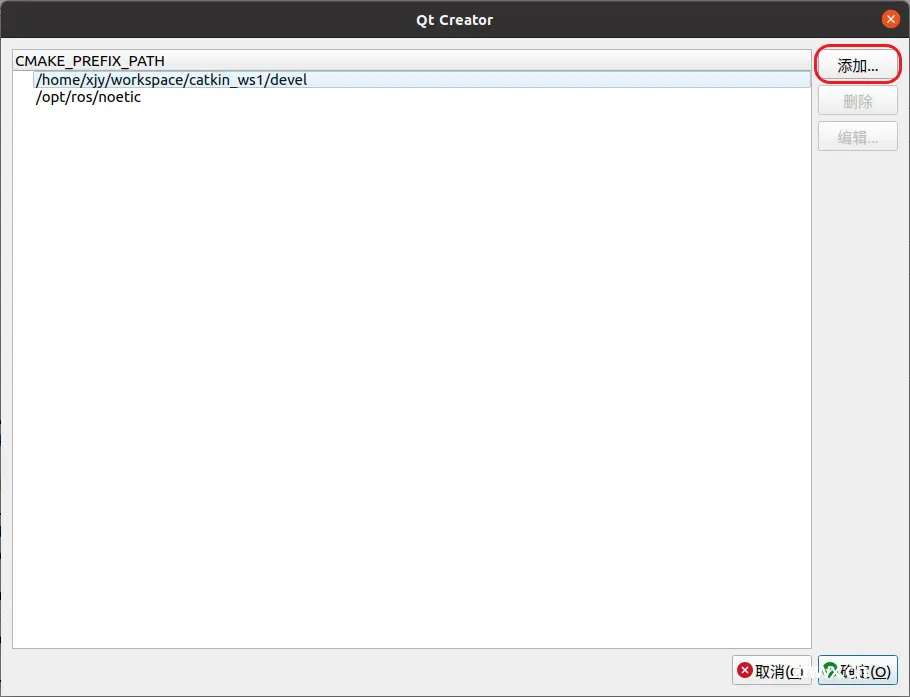
在弹出的对话框中点击“添加”:
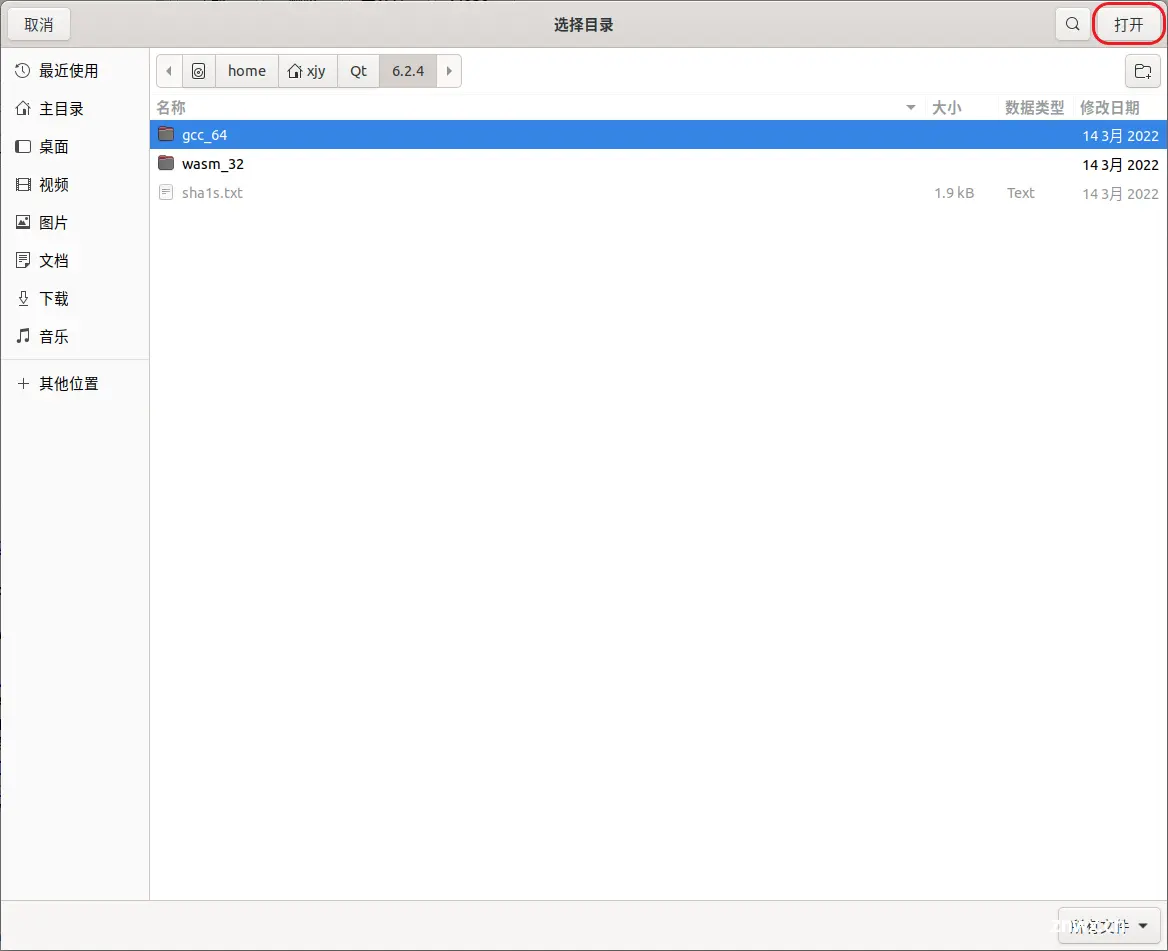
找到 Qt 组件库所在目录(在 Qt 的安装目录下),点击“打开”:
可以看到路径列表中已经添加了 Qt 组件库所在路径了,点击右下方“确定(O)”以保存更改:
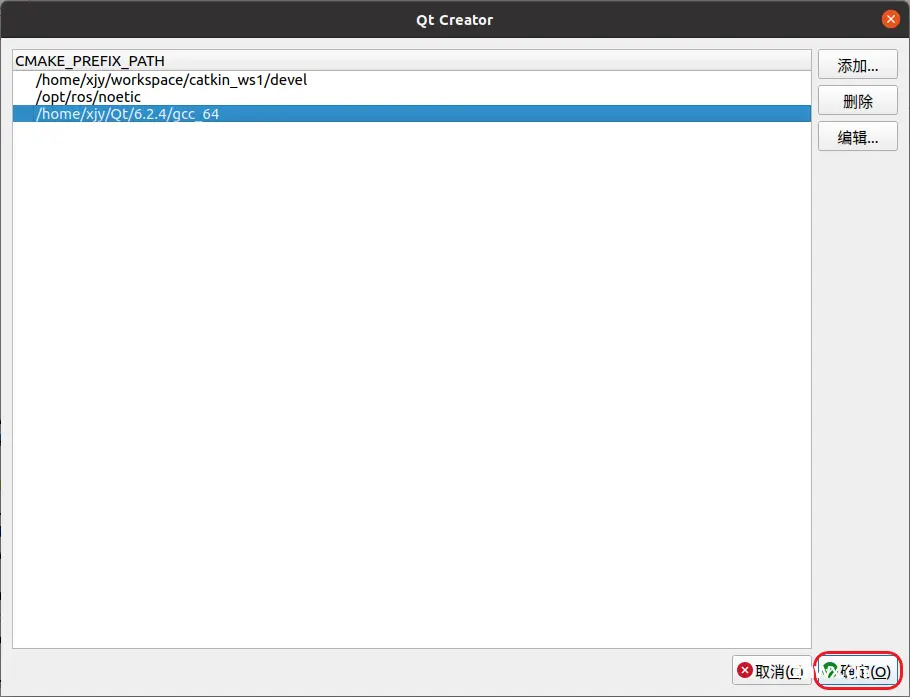
完成后可以看到 CMAKE_PREFIX_PATH 中已经成功添加了我们新增的路径了:

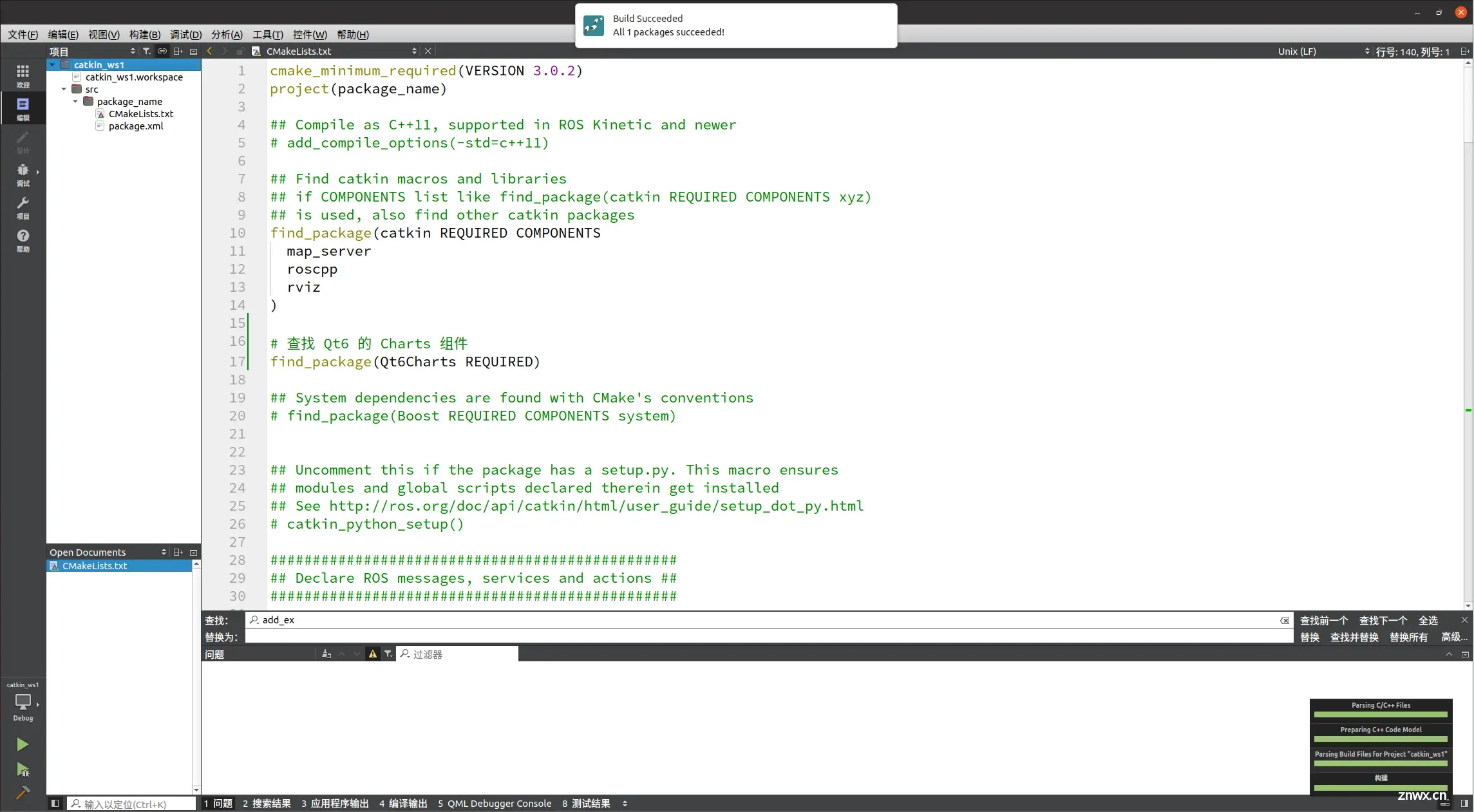
回到 ROS 软件包的 CMakeLists.txt 文件,接下来我们可以尝试查找一个 Qt 组件。在 CMakeLists.txt 文件中的适当位置添加下方命令即可:
# 查找 Qt6 的 Charts 组件find_package(Qt6Charts REQUIRED)
保存更改,随后右击项目名称,点击“重新构建”:
构建成功!说明 CMake 已经成功找到该 Qt 组件啦~:
后续小伙伴们就能在项目中愉快地使用各种 Qt 组件了,只需要在 CMakeLists.txt 中通过 target_link_libraries 命令将模块链接到目标项目即可。例如:
# 向项目添加可执行文件(仅作演示,毕竟我们新建的 ROS 软件包中并没有 main.cpp 源文件)add_executable(${PROJECT_NAME}_node main.cpp)# 将 Qt6 Charts 模块链接到目标target_link_libraries(${PROJECT_NAME}_node Qt6::Charts)
上一篇: 【C#】未能加载文件或程序集“CefSharp.Core.Runtime.dll”或它的某一个依赖项。找不到指定的模块。
下一篇: 华为OD机试C卷-- 单词重量(Java & JS & Python)
本文标签
声明
本文内容仅代表作者观点,或转载于其他网站,本站不以此文作为商业用途
如有涉及侵权,请联系本站进行删除
转载本站原创文章,请注明来源及作者。