【C++】检测TCP链接超时——时间轮组件设计
东洛的克莱斯韦克 2024-10-03 13:05:32 阅读 63
目录
引言
时间轮思想
设计的核心思路
完整代码
组件接口
个人主页:东洛的克莱斯韦克-CSDN博客
引言
对于高并发的服务器来说,链接是一种比较珍贵的资源,对不活跃的链接应该及时释放。判断连接是否活跃的策略是——在给定的时间内,该链接上并没有读事件,写事件,异常事件等。如果连接上有事件发生,则刷新链接的活跃时间。
而时间轮就可以高效的检测链接是否活跃,本文会带大家封装出一个时间轮的组件。
时间轮思想
时间轮的思想来源于钟表,钟表的时分秒指针指到特定的位置,就代表时间到了。参考钟表的策略,我们可用一个数组代表一个钟表,数组的下标代表时间,指向数组的指针按特定的时间向后移动,指针执行哪个位置,就代表哪个位置的时间到了。
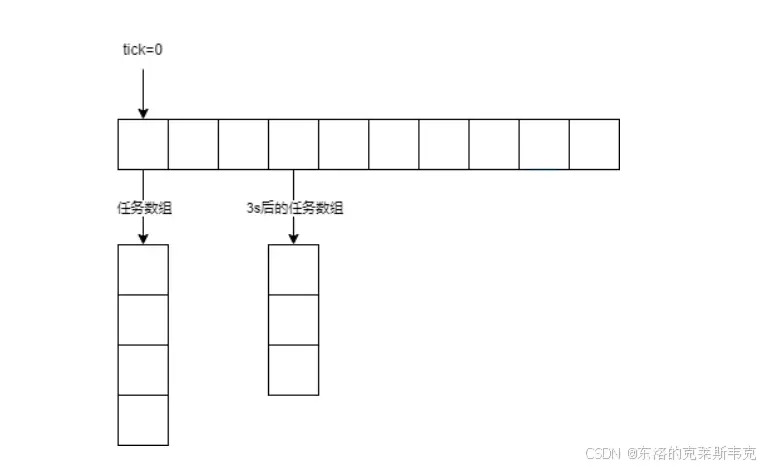
相应的,指针1秒向后走一格,数组大小为60,这就是分级的时间轮。指针1分钟向后走一格,数组大小为60,这就是时级的时间轮。指针1小时向后走一格,数组大小为24,这就是天级的时间轮。
也就是说对于时间特别大的场景中,不需要很大的的空间。比如,一个任务在1天3小时15分5秒后超时(假设)只要天级时间轮指向1,就把该任务抛到时级时间轮中...以此类推。
设计的核心思路
我们需要两个关键的技术——析构函数,智能指针shared_ptr。
【C++】智能指针——auto_ptr,unique_ptr,shared_ptr_auto ptr-CSDN博客
在我们上述的阐述中,任务是有超时时间的,当时间轮的指针指向这个任务时,说明时间到了,我们该执行这个任务呢——答案是把任务的执行放到析构函数里。
时间轮的容器可以用两层vevtor—— std::vector<std::vector<TaskSharedPtr>>。如果指针指向TaskSharedPtr(任务类),就释放该类,该类的析构函数就会指向任务的回调。两次vevtor表示在同一个时间内可能会有多个任务。
智能指针shared_ptr用于任务类的超时时间刷新,在上文提到的高并发服务的场景中,如果触发了链接中的事件,就需要重新刷新时间,但时间轮的指针是一直向后移动的,任务类的下标迟早会被指到,然后该类就会被析构。
那么我们可以用shared_ptr管理任务类,并且新shared_ptr被插入时间轮之后正确的位置,有shared_ptr的引用计数在,任务类就不会被析构,时间也相当于刷新了。
完整代码
<code>#include <functional>
#include <vector>
#include <memory>
#include <unordered_map>
#include <iostream>
#include <unistd.h>
using TaskFunk = std::function<void()>; // 定时任务执行的方法
using CleanFunk = std::function<void()>; // 清理资源的回调
class TimerTask //任务类
{
private:
uint64_t _id; // 任务对象的唯一性标识
uint32_t _timeout_t; // 任务的超时时间
bool _cancel; // 取消任务为true, 不取消为false
TaskFunk _taskfunk; // 要执行的任务
CleanFunk _cleanfunk;
public:
TimerTask(uint64_t id, uint32_t timeout_t, const TaskFunk &funk)
: _id(id), _timeout_t(timeout_t), _cancel(false), _taskfunk(funk)
{
}
~TimerTask()
{
if (_cancel == false)
{
_taskfunk();
}
_cleanfunk();
}
void AddCleanFunk(const CleanFunk &func)
{
_cleanfunk = func;
}
uint32_t GetTimeout() // 获取超时时间
{
return _timeout_t;
}
void CancelTask() // 取消任务
{
_cancel = true;
}
};
class TimerWheel //时间轮
{
private:
using TaskSharedPtr = std::shared_ptr<TimerTask>;
using TaskWeakPtr = std::weak_ptr<TimerTask>;
size_t _ptr; // 时间轮的指针
size_t _capacity; // 时间轮的容量
std::vector<std::vector<TaskSharedPtr>> _wheel; // 时间轮容器
std::unordered_map<uint64_t, TaskWeakPtr> _v; // 任务id和任务weak_ptr映射的容器,快速索引,使shared_ptr引用计数加一
private:
void CleanV(uint64_t id) // 清理_v容器资源的函数
{
auto t = _v.find(id);
if (t != _v.end())
{
_v.erase(id);
}
}
public:
TimerWheel(size_t capacity)
: _ptr(0), _capacity(capacity), _wheel(capacity)
{
}
void AddTimerTask(uint64_t id, uint32_t timeout_t, const TaskFunk &funk) // 添加定时任务
{
TaskSharedPtr sp(new TimerTask(id, timeout_t, funk));
TaskWeakPtr wp = sp;
_v[id] = wp; // 向_v中注册
sp->AddCleanFunk(std::bind(&TimerWheel::CleanV, this, id)); // 设置清理_v容器资源的回调
size_t pos = (_ptr + sp->GetTimeout()) % _capacity;
_wheel[pos].push_back(sp);
}
void UpdateTimerTask(uint64_t id) // 更新超时的时间
{
auto t = _v.find(id);
if (t != _v.end())
{
TaskSharedPtr sp = _v[id].lock();
size_t pos = (_ptr + sp->GetTimeout()) % _capacity;
_wheel[pos].push_back(sp);
}
}
void UpdatePtr() // 每隔?时间执行一次
{
_wheel[_ptr].clear();
_ptr++;
_ptr %= _capacity;
}
void CancelTask(uint64_t id) // 取消任务
{
auto t = _v.find(id);
if (t != _v.end())
{
TaskSharedPtr sp = _v[id].lock();
sp->CancelTask();
}
}
};
组件接口
AddTimerTask:向时间轮中注册任务,三个参数分别是任务id ,任务的超时时间,任务调用的方法。
在上层一定要确保任务id的唯一性。
UpdateTimerTask:传入任务id, 刷新超时时间
UpdatePtr: 这个接口就是前文说的时间轮的指针,多久调用一次就表示时间轮是一个什么级别的的时间轮
CancelTask:传入任务id,说明该任务在时间到了之后也不会被执行。
上一篇: 项目实战:Qt+OSG爆破动力学仿真三维引擎测试工具v1.1.0(加载.K模型,子弹轨迹模拟动画,支持windows、linux、国产麒麟系统)
下一篇: PHP毕业设计作品:基于PHP公司企业网站系统设计与实现开题报告和源代码成品
本文标签
声明
本文内容仅代表作者观点,或转载于其他网站,本站不以此文作为商业用途
如有涉及侵权,请联系本站进行删除
转载本站原创文章,请注明来源及作者。