调频连续波(FMCW)原理
AYu~ 2024-08-09 10:31:01 阅读 53
FMCW(Frequency Modulated Continuous Wave),即调频的连续信号。在许多方面得到应用,比如生物雷达,车载雷达,无人机雷达等等方面都有FMCW波的应用,目前的商业化的雷达模块大多使用的该原理来实现雷达的测距,测速。
1 信号的模型
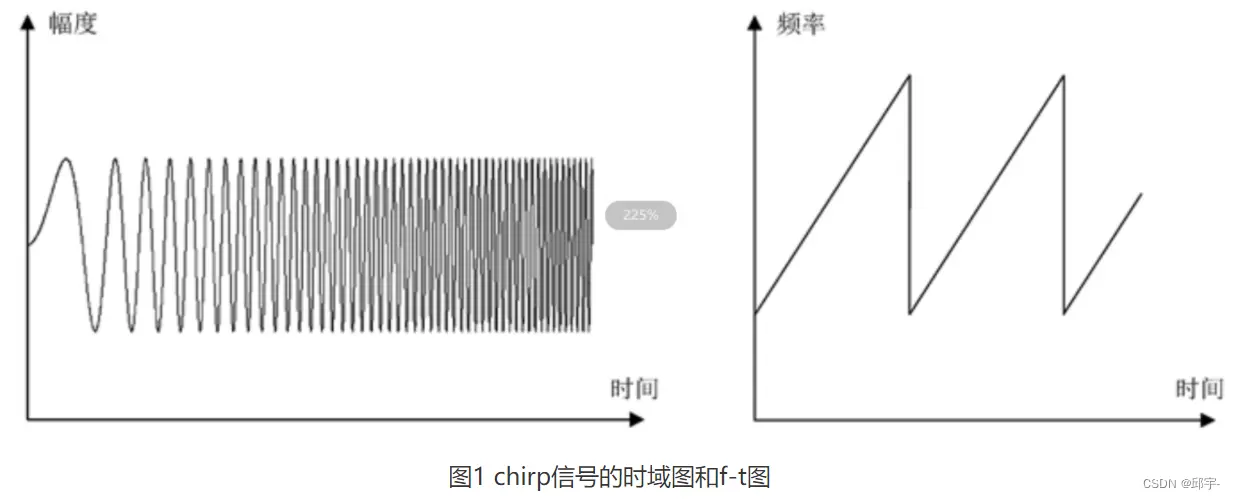
一般而言我们使用Chirp信号。下图为一个典型的Chirp信号的模型,从时域波看,其波形时一个频率随时间线性变换的波形。设线性调制波的波形的是锯齿波。则下图为典型的Chirp信号在时域和频域的图形如图所示。所以可以发射信号的公式(1):

其中S为锯齿波的斜率,值为信号的调频的带宽除于调制的周期BTc,所以式子(1)的相位可以写为以下的形式(2):

补充以下简单的数学知识,相位的导数是频率,下边的公式(3)

2 静止情况测距
设静止的目标距离雷达的距离为R,电磁波在空气中传输速度为c,则接受的信号接受机接受到的信号比发射的信号延迟

,所以理想中接受机的目标回波信号如为式(4):

将接收到信号和和Sr(t)和St(t)进行混频处理,处理的简单图如图所示。对于单个目标得到的频率图如图2所示
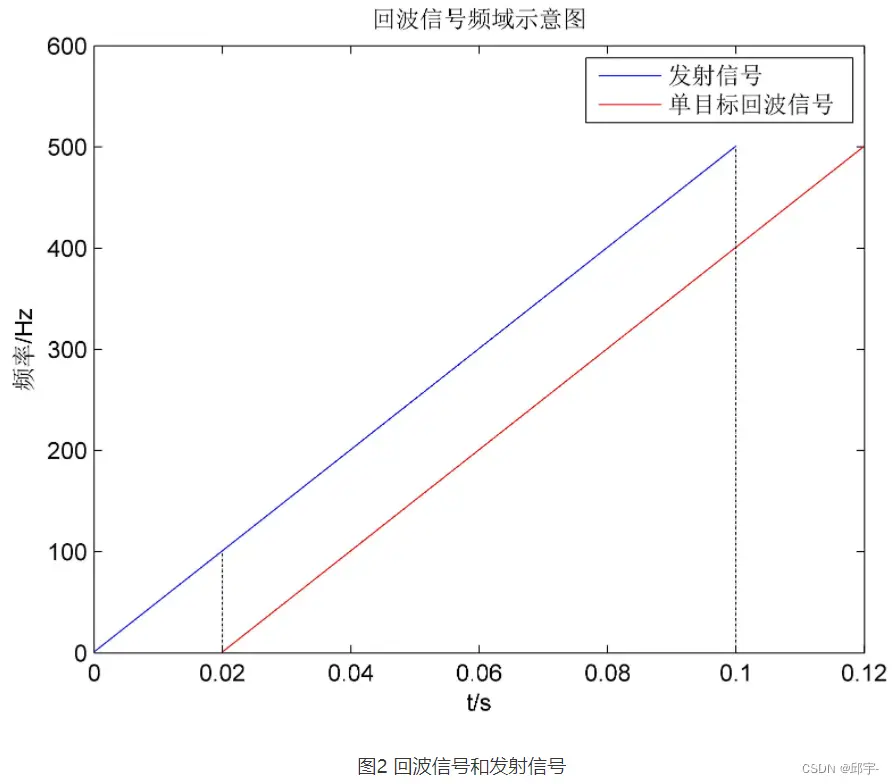
图中黑色的虚线便是中频信号的频率,这个时候很明显的看出发射信号和单目标的回波信号的频率差为一个单频信号由公式(4)得到接收回波信号的相位表达式子(5):

则中频信号的相位公式(6)为:

通过这个式子可以知道中频的频率为

,所以在雷达系统中可以将中频使用ADC变成数字信号后使用FFT测量频率fIF,其他的参数可知来测量R,显然距离公式R为(7):

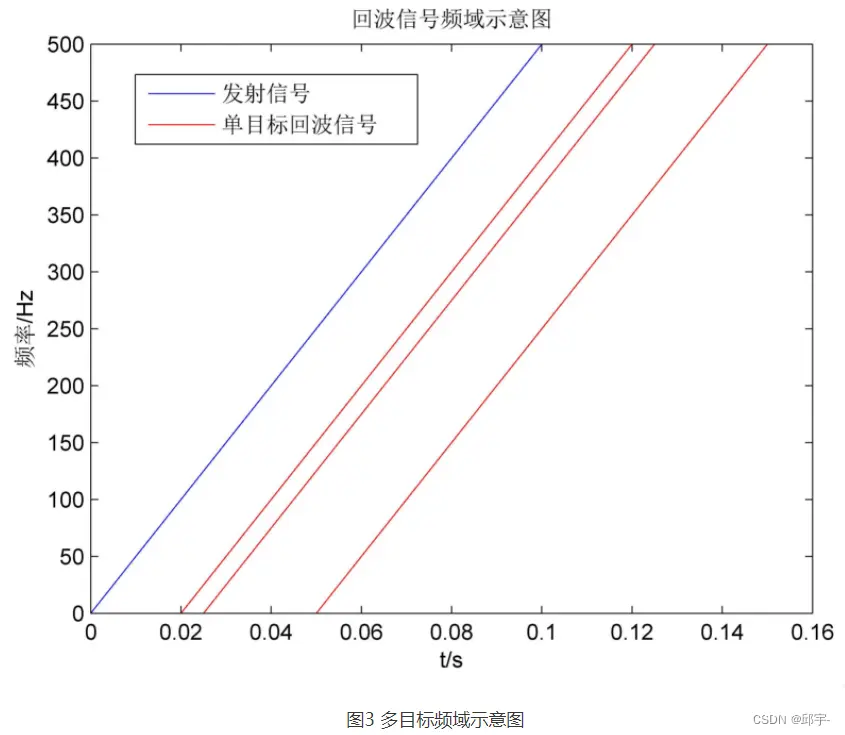
同理该原理可以推到多目标的情况,当目标多于单个时候,计算得到的FFT的频率谱存在多个峰值,如图3所示
3 运动情况下测速
设在电磁波的覆盖区域中,某一目标在t0时刻距离发射天线为R0,以径向v远离天线(以远离天线为正方向),那么接受到的目标的回波信号公式如(4)所示,但是

有所改变,

为信号的延时,这个时候通过混频后得到中频信号的相位如(8):

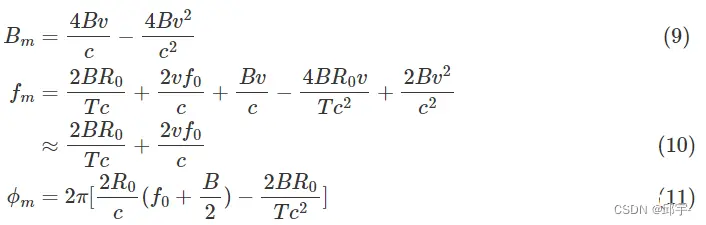
很显然对于运动的信号的中频信号依然是一个线性调频信号,所以信号的参数带宽Bm,载频fm,初相

所以运动下的回波信号的中频信号依然可以写成(12):

写成复指数的形式(13):

这个时候可以得到运动信号的中频信号,从(9)~(11)式子中可以显然看出带宽Bm,载频fm,初相ϕm都和目标的v存在联系。现在对其采样从模拟信号转化到数字信号来进入数字芯片进行处理,得到距离和速度的信息。设我们使用的ADC的采样时间为Ts,得到离散化后的信号r[n]。并对其使用DFT计算(15):
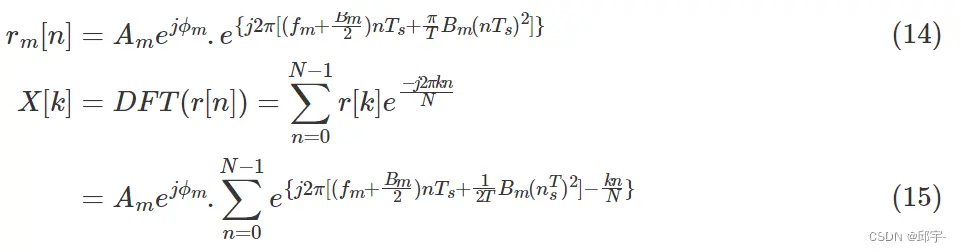
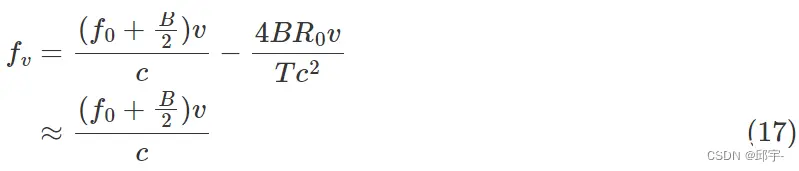
fm和速度v和R0有关,但是在扫频过程中,fm的变化不大,所以不容易计算出目标的径向速度,但是可以得到在扫频周期,信号的包络χl[k]。

通过数学计算,有兴趣自己算
这样就可以得到速度和距离的信息,这个是基本的调频连续波测速和测距的原理。
声明
本文内容仅代表作者观点,或转载于其他网站,本站不以此文作为商业用途
如有涉及侵权,请联系本站进行删除
转载本站原创文章,请注明来源及作者。