一起玩儿物联网人工智能小车(ESP32)——41. 直流有刷电机驱动模块——L9110S、TB6612FNG和DRV8833简介
一起玩儿科技 2024-06-30 11:01:03 阅读 95
摘要:本文介绍如何使用直流有刷电机驱动模块——L9110S、TB6612FNG和DRV8833
在前边很详细的介绍了直流有刷电机驱动模块L298N,该模块性能良好,输出功率大。但体积也是偏大,本篇文章介绍一下市场上另外几个常见的小型直流有刷电机驱动模块L9110S、TB6612FNG和DRV8833的使用方法。
因为都是直流有刷电机的驱动模块,因此这几个在使用上也是差别不大,如果有前面学习L298N的基础,相信很快就能掌握这几个模块的使用方法。在旋转电机驱动模块的时候,最主要的指标就是电机驱动模块所支持的电压范围和最大电流要满足直流电机的要求。在这两点满足要求的情况下,可以选择体积小一些的、易于安装的驱动模块来使用。
L9110S
L9110S是为控制和驱动电机设计的两通道推挽式功率放大专用集成电路器件,将分立电路集成在单片IC之中,使外围器件成本降低,整机可靠性提高。该芯片有两个TTL/CMOS兼容电平的输入,具有良好的抗干扰性;两个输出端能直接驱动电机的正反向运动,它具有较大的电流驱动能力,每通道能通过800mA的持续电流,峰值电流能力可达1.5A;同时它具有较低的输出饱和压降;内置的钳位二极管能释放感性负载的反向冲击电流,使它在驱动继电器、直流电机、步进电机或开关功率管的使用上安全可靠。L9110S 被广泛应用于玩具汽车电机驱动、脉冲电磁阀门驱动,步进电机驱动和开关功率管等电路上。
常见的L9110S模块如下图所示:
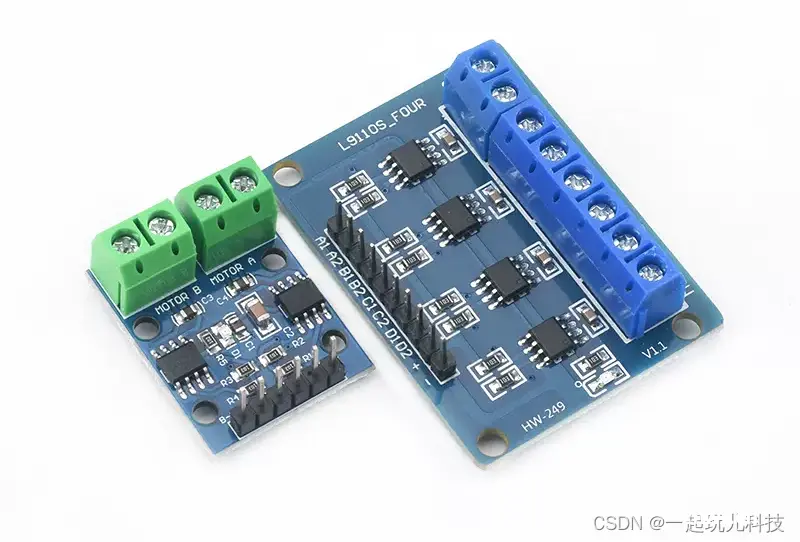
上图左侧为2路L9110S驱动模块,右图为4路L9110S驱动模块,图中的黑色芯片就是L9110S芯片,每个芯片可以驱动一路直流电机。整个芯片的集成度非常的高,只有极少的外围电路。
L9110S芯片的参数如下:
极限参数:800mA/2.5V-12V低静态工作电流:0.00 uA宽电源电压范围:2.5V-12V ;每通道输出能力:800mA连续电流工作温度:-30 ℃-105 ℃。输入类型:标准型
在这里要重点把握的是工作电压为2.5V~12V,持续电流输出能力为800mA,峰值电流1.5A。对于在这个参数范围之内的小型直流有刷电动机,可以放心选用这个驱动模块。
下面来看一下L9110S的接口和使用方法。如下图所示:
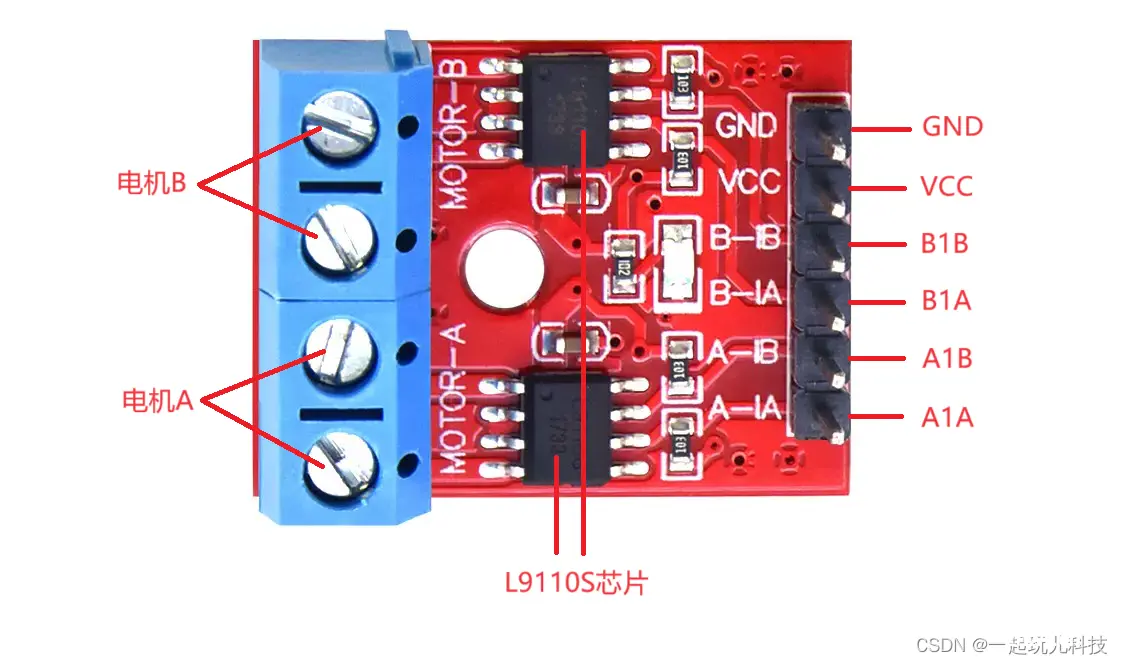
引脚定义说明如下表所示:
| 标识
| 名称
| 说明
|
| GND
| 电源地
|
|
| VCC
| 电源正极
| 电压范围2.5V~12V
|
| B1B
| 电机B控制引脚B
| 接单片机的IO引脚
|
| B1A
| 电机B控制引脚A
| 接单片机的IO引脚
|
| A1B
| 电机A控制引脚B
| 接单片机的IO引脚
|
| A1A
| 电机A控制引脚A
| 接单片机的IO引脚
|
| MOTOR-B
| 电机B
| 接一个电动机的两端
|
| MOTOR-A
| 电机A
| 接一个电动机的两端
|
可以看到,L9110S相对于之前介绍的L298N要简单了一些。由于没有了使能端,整个模块的控制逻辑也就简单了。具体的控制逻辑如下所示:
| 控制端
| 控制端状态
| |||
| A1A
| 0
| 0
| 1
| 1
|
| A1B
| 0
| 1
| 0
| 1
|
| 电机A状态
| 停止
| 反转
| 正转
| 停止
|
| B1A
| 0
| 0
| 1
| 1
|
| B1B
| 0
| 1
| 0
| 1
|
| 电机B状态
| 停止
| 反转
| 正转
| 停止
|
可以看到,这个控制逻辑与L298N使能端接高电平时的控制方式时完全一样的。如果想要改变电机的转速,那么同样是通过控制L9110S的单片机IO引脚输出PWM信号就可以了。
2. TB6612FNG
TB6612FNG是一款直流电机驱动器件,采用支持大电流的MOSFET-H桥结构,双通道电路输出,每一个芯片可同时驱动2个电机。
TB6612FNG的电机驱动电压与逻辑控制电压可以分别连接不同的电源,电机驱动电压VM可以在3~13.5V之间,逻辑控制部分的输入电压VCC在2.7~5.5V之间。TB6612FNG每通道可输出最高1.2A的连续驱动电流,启动峰值电流达2A/3.2A(连续脉冲/单脉冲);有4种电机控制模式:正转/反转/制动/停止;PWM支持频率高达100kHz;支持待机状态;有片内低压检测电路与热停机保护电路;工作温度:-20~85℃。
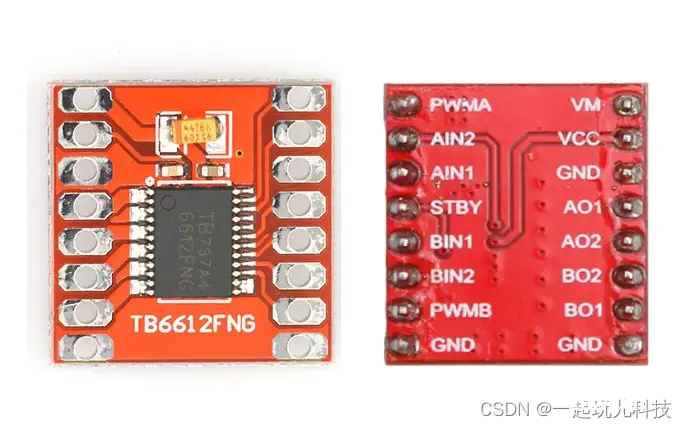
下面来看一下TB6612FNG的引脚说明,如下表所示:
| 引脚
| 名称
| 连接
|
| PWMA
| 电机A的PWM控制引脚
| A通道的PWM输入
|
| AIN2
| 电机A控制引脚2
| A通道逻辑输入2引脚
|
| AIN1
| 电机A控制引脚1
| A通道逻辑输入1引脚
|
| STBY
| 模块待机引脚
| 接低电平处于待机模式,接高电平开始工作
|
| BIN1
| 电机B控制引脚1
| B通道逻辑输入1引脚
|
| BIN2
| 电机B控制引脚2
| B通道逻辑输入2引脚
|
| PWMB
| 电机B的PWM控制引脚
| B通道PWM输入引脚
|
| GND
| 电源地
|
|
| VM
| 电机驱动电源
| 电源输入正极,最大接13.5V
|
| VCC
| 逻辑控制电源
| 逻辑电源正极,接3.3V
|
| AO1
| 电机A引脚1
| A通道输出1引脚
|
| AO2
| 电机A引脚2
| A通道输出2引脚
|
| BO2
| 电机B引脚1
| B通道输出2引脚
|
| BO1
| 电机B引脚2
| B通道输出1引脚
|
通过上表,可以看到这个芯片提供了单独的待机引脚是这个模块的一个特点,可以通过控制STBY引脚来使整个芯片处于待机状态,降低芯片的功耗。如果不需要这个功能,可以将其接在VCC端,始终保持高电平,芯片一直处于工作状态。这个芯片的另一个特点就是驱动电机的电源与控制部分的电源是分开的,因此需要根据情况,提供两路电源才能正常工作。
由于TB6612FNG在控制逻辑上与L298N没什么区别。PWM控制引脚用来控制电机的速度,IN引脚用来控制电机的方向。在这里就不再讲解了。
3. DRV8833
DRV8833是一种双通道电机驱动方案。每一个芯片有两路H桥驱动,可以驱动两个有刷直流电机。每一个H桥的功率输出模块由N通道功率MOSFET组成,叫作H桥驱动器。每个桥包含整流电路和限流电路。内部关断功能包含过流保护,短路保护,欠压锁定保护和过温保护,并提供一个错误输出管脚。
DRV8833芯片的电源供电电压为2.7~10.8V,每个H桥输出的均方根(RMS)电流为1.5A,峰值可达2A。DRV8833模块如下图所示:
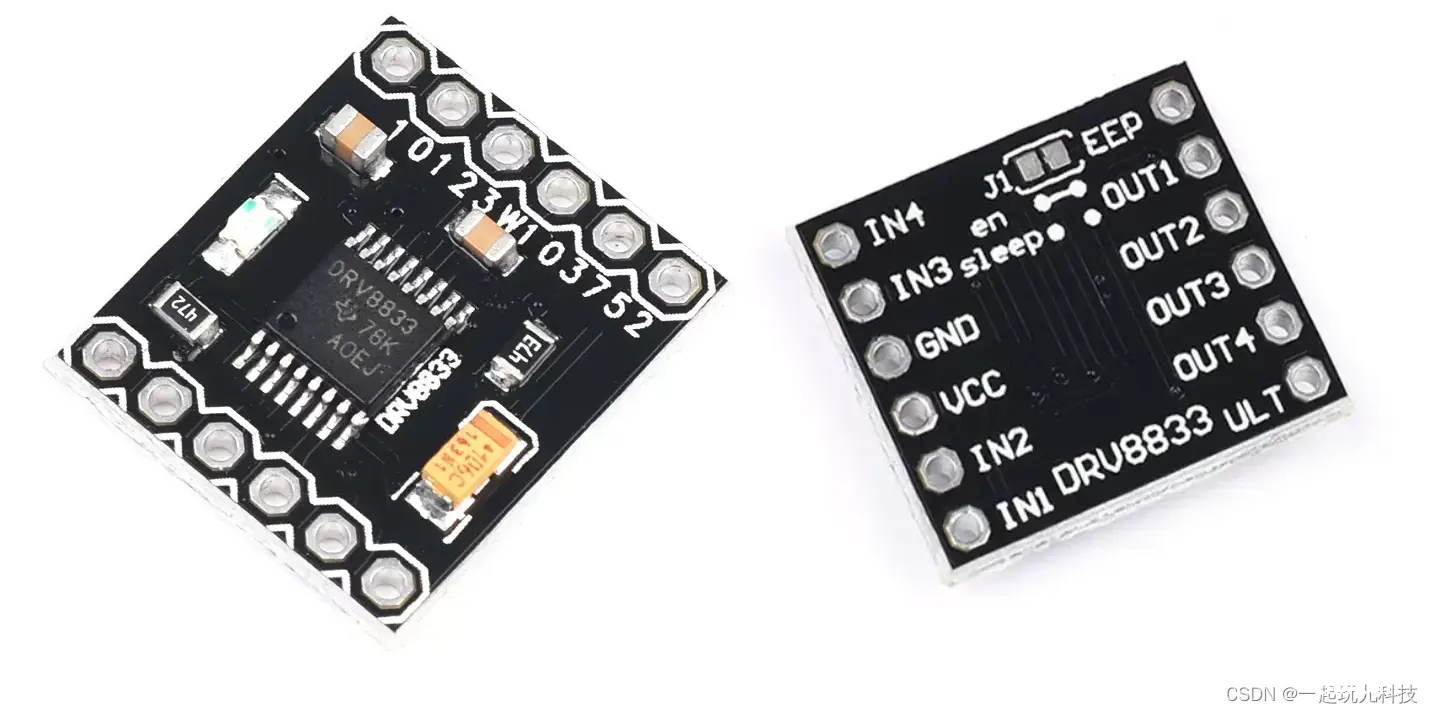
DRV8833模块没有PWM控制端,也就是如果需要调整电机的速度,需要通过IN端来实现。EEP(SLEEP的简称)接口为休眠端口,可以通过程序控制,使其工作在待机状态,降低能耗。在这里需要注意的是,EEP前边的J1跳线需要断开,EEP接口才能发挥作用。如果J1跳线被短路了,那就说明EEP引脚被接到高电平了,会始终处于工作状态。
DRV8833模块的一个特点是有个ULT(FAULT)引脚,这个引脚是漏极开路输出,平时处于高电平,在连接单片机引脚时需要增加上拉电阻,或者让单片机引脚工作在弱上拉状态。当DRV8833芯片出现温度过高、电流过大时,该引脚会输出低电平,单片机可以可以通过监测此引脚来知晓DRV8833模块是否处于正常工作状态,并在出现异常时,采取必要的措施。
好了,常见的直流有刷电机驱动模块就介绍到这里了。总体上来说大同小异,个别差异不大。
上一篇: 重磅!史上最强AI模型Claude 3.5发布,OpenAI原班人马又发大招
下一篇: Speech | 人工智能中语音质量评估方法详解及代码
本文标签
一起玩儿物联网人工智能小车(ESP32)——41. 直流有刷电机驱动模块——L9110S、TB6612FNG和DRV8833简介
声明
本文内容仅代表作者观点,或转载于其他网站,本站不以此文作为商业用途
如有涉及侵权,请联系本站进行删除
转载本站原创文章,请注明来源及作者。