YOLOV8识别物体,并返回物体的像素坐标
唐豆豆* 2024-10-04 09:05:02 阅读 78
一、YOLOV8的相关文件修改
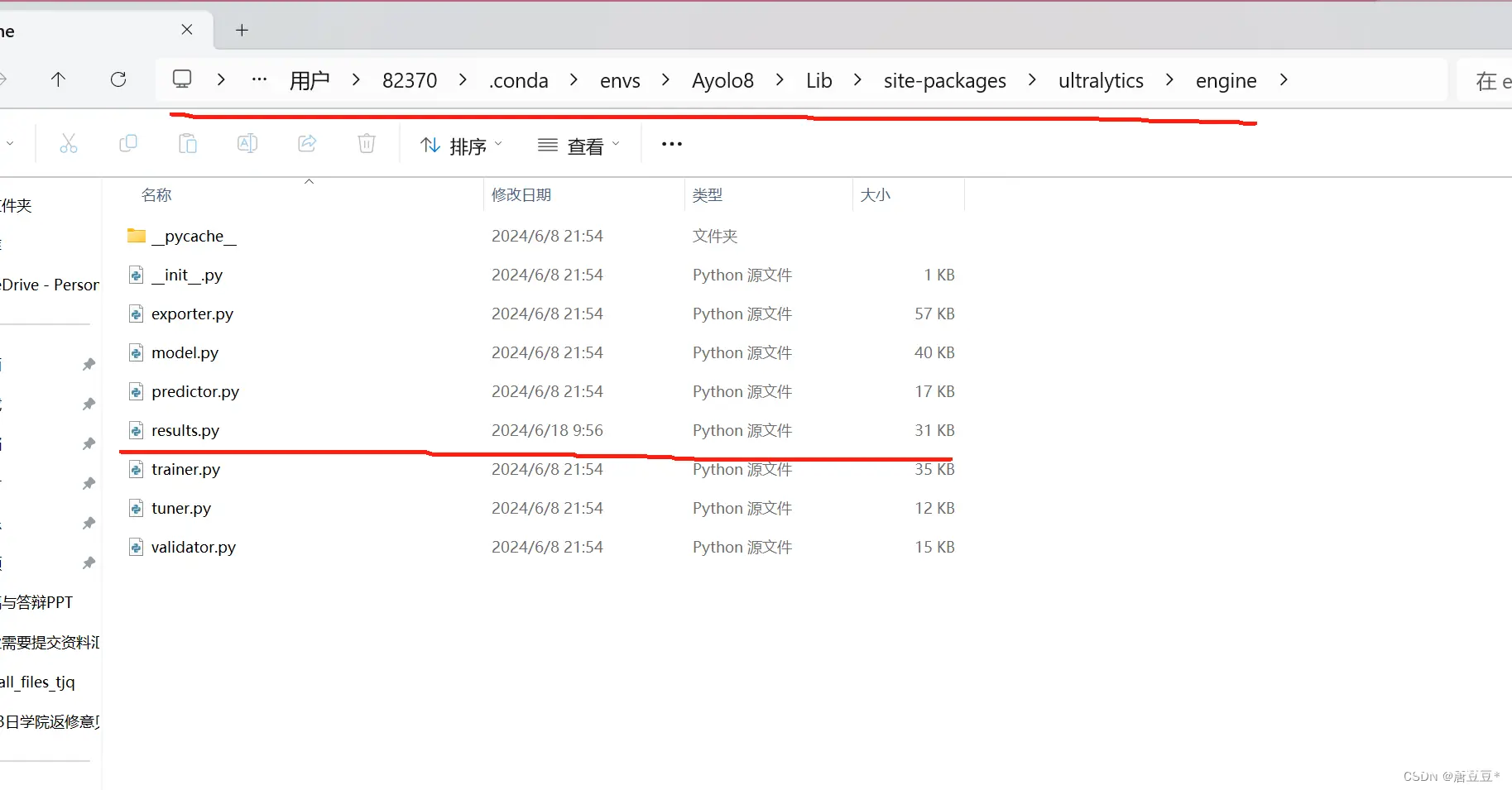
1. 进入路径文件:
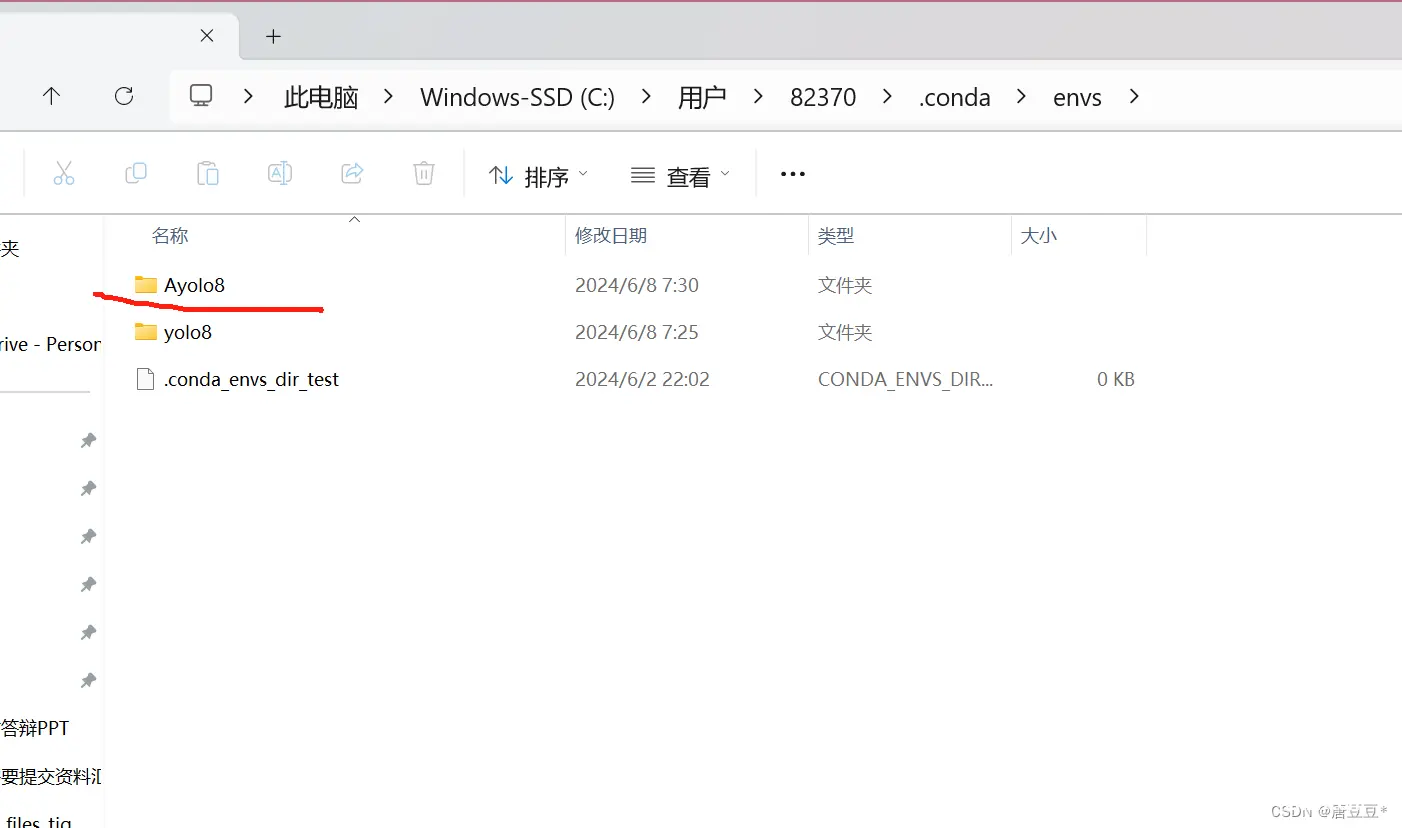
C:\Users\82370\.conda\envs\Ayolo8\Lib\site-packages\ultralytics\engine\result.py(此处路径为你的anacod安装的虚拟环境Ayolo8位置)
<code>conda create -n Ayolo8 python=3.11 # 虚拟环境安装代码
conda activate Ayolo8 # 激活虚拟环境
pip install ultralytics # 安装相应的ultralytics

2. 打开result.py,补充绘制中心点和标注中心点位置代码
找到相应的函数:annotator.box_label(),右击——转到定义,进入定义函数的文件plotting.py
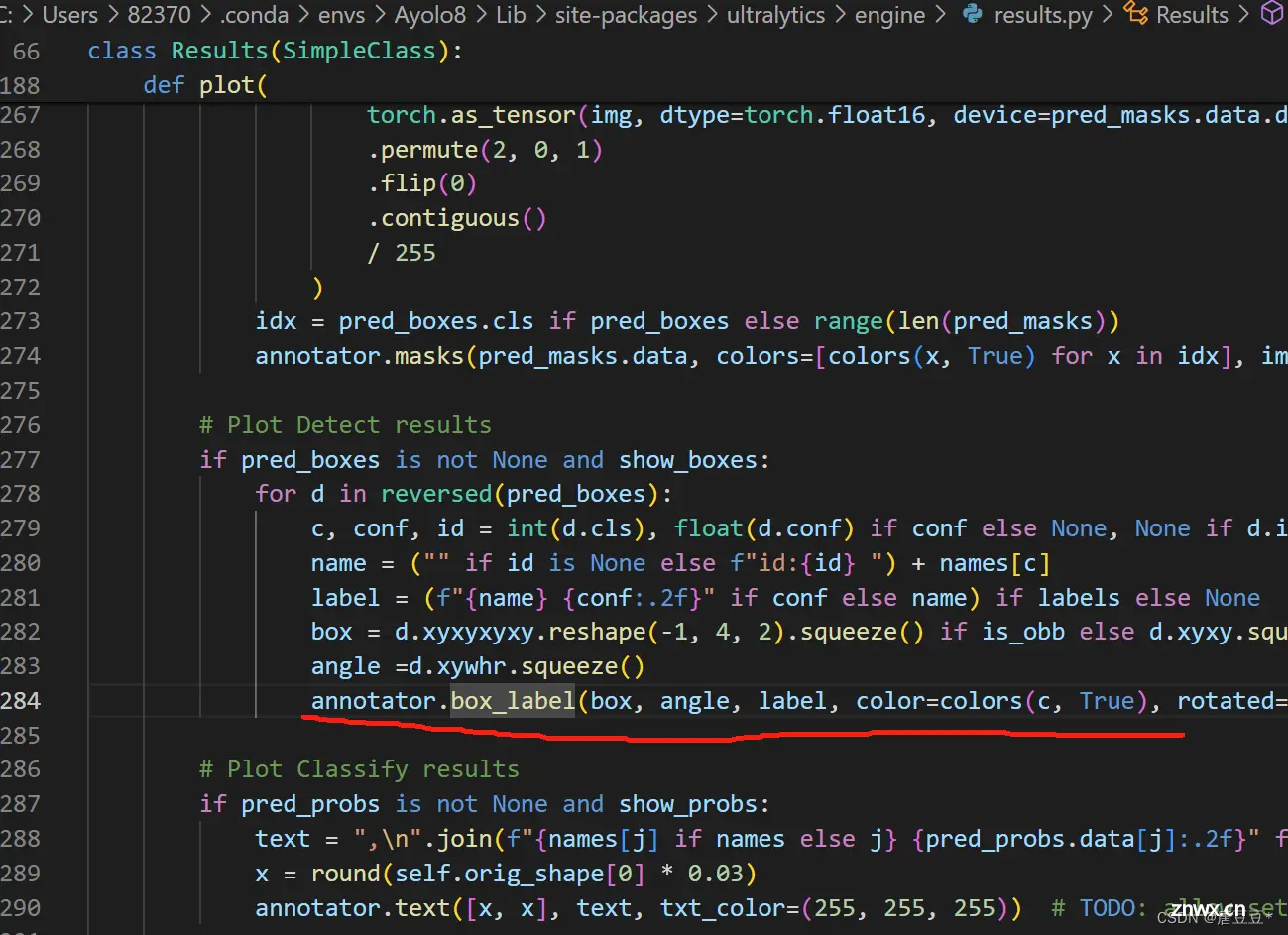
补充相应的代码

补充代码内容如下,可以直接复制过去:
<code> # 补充代码:
# 在预测图中绘制一个中心坐标红点
# self.im表示圆点绘制的位置,((p1[0]+p2[0])//2,(p1[1]+p2[1])//2)表示坐标位置//表示取整除法
# self.lw表示线宽和半径,(0,0,225)表示颜色
cv2.circle(self.im,((p1[0]+p2[0])//2,(p1[1]+p2[1])//2),self.lw,(0,0,225),self.lw)
# 创建中心点坐标变量
Center = (((p1[0]+p2[0])/2+p1[0]),((p1[1]+p2[1])/2+p1[1]))
# 用于在图像上添加文本
# str(Center)表示要添加的文本内容,
# ((p1[0]+p2[0])//2,(p1[1]+p2[1])//2)表示文本起始点坐标
# 0代表字体类型, self.lw/3表示字体大小,txt.color表示文本颜色
# 4表示线宽,lineType表示线型
cv2.putText(self.im, str(Center),((p1[0]+p2[0])//2,(p1[1]+p2[1])//2),0,
self.lw/3,txt_color,thickness=4,lineType=cv2.LINE_AA)
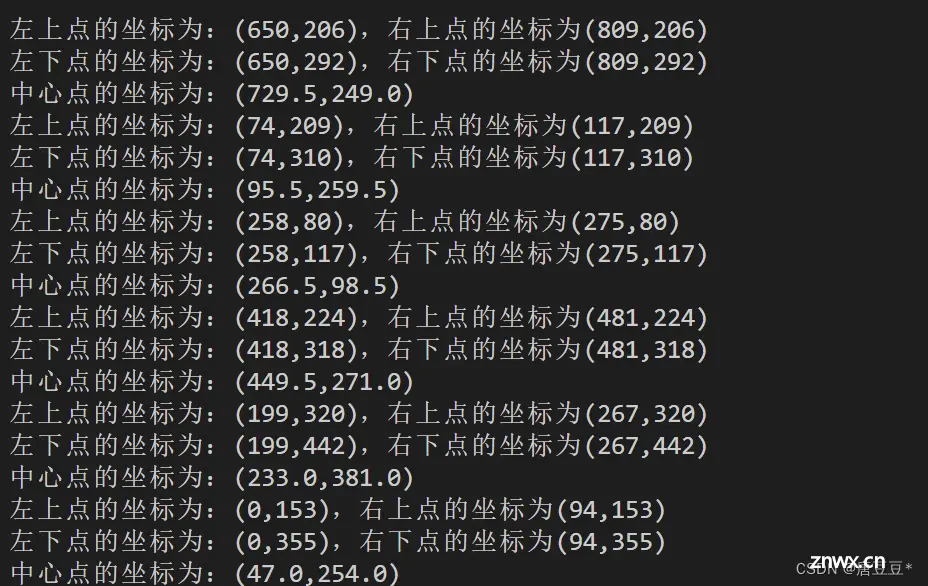
# # 打印坐标信息
print("左上点的坐标为:(" + str(p1[0]) + "," + str(p1[1]) + "),右上点的坐标为(" + str(p2[0]) + "," + str(
p1[1]) + ")")
print("左下点的坐标为:(" + str(p1[0]) + "," + str(p2[1]) + "),右下点的坐标为(" + str(p2[0]) + "," + str(
p2[1]) + ")")
print("中心点的坐标为:(" + str((p2[0] - p1[0]) / 2 + p1[0]) + "," + str((p2[1] - p1[1]) / 2 + p1[1]) + ")")
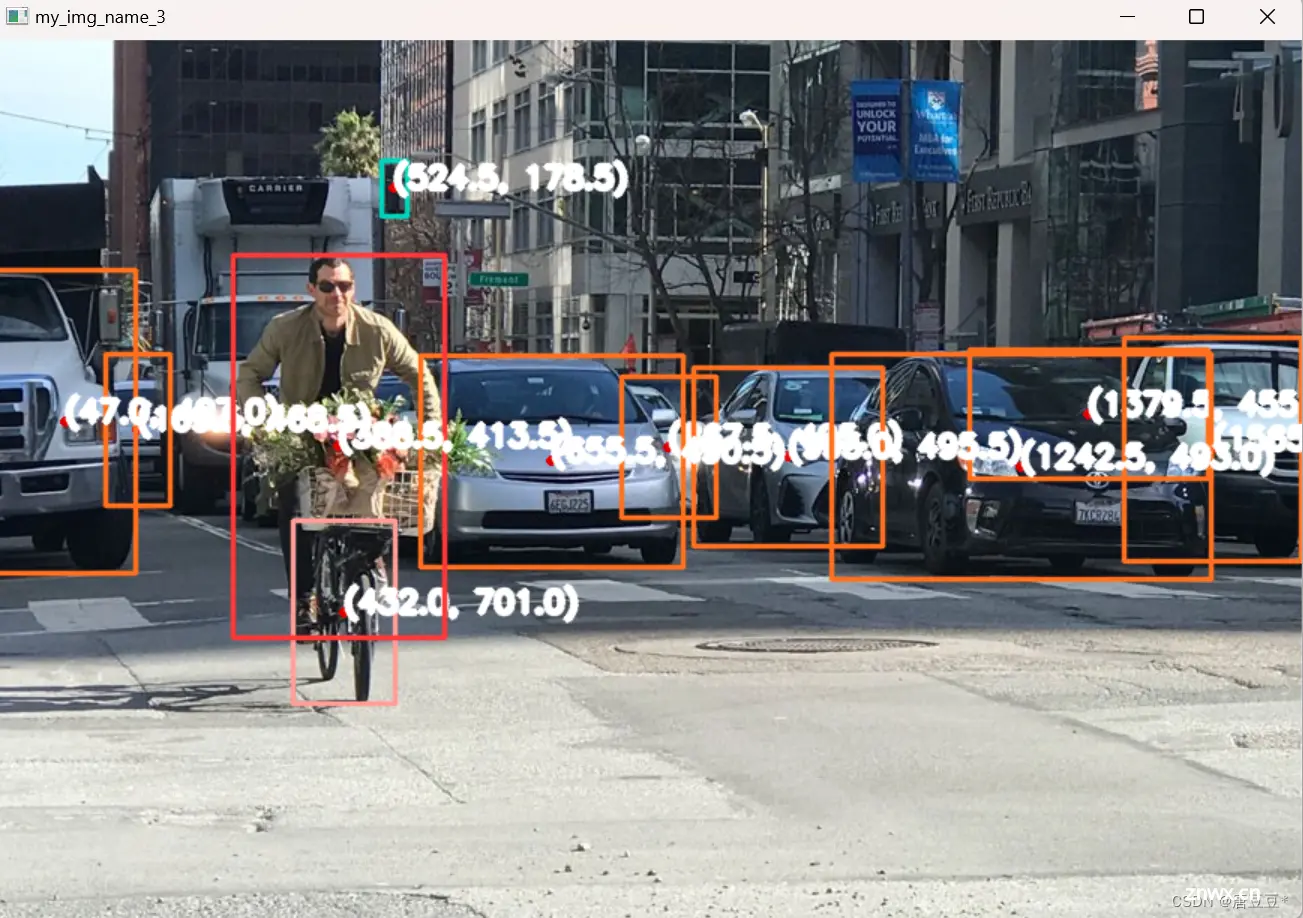
二、获取像素坐标示例
运行test.py文件
# 导入openCV库,实现相应的图片读写
import cv2 # 导入openCV库的代码
# 下载图片
import numpy as np # 使用np作为numpy库的别名
import urllib.request # 通过导入request模块,我们可以使用它提供的功能来发送HTTP请求、获取网页内容等。
from ultralytics import YOLO # 将YOLOv8导入到该py文件中
# 加载官方或自定义模型
model = YOLO(r"E:\Deep learning\YOLOv8\yolov8n.pt") # 加载一个官方的检测模型
color_3 = cv2.imread('3.jpeg')
source=[color_3]
results = model.predict(source, save=True, show_conf=False)
color_3 = results[0].plot() # 在图像上添加色彩帧(追踪结果)
cv2.imshow('my_img_name_3', color_3)
参考博文:(博文写的非常详细,参考价值高👍)
YOLOv8、YOLOv8_OBB输出detect检测到的目标坐标信息_yolov8输出预测框的坐标-CSDN博客
声明
本文内容仅代表作者观点,或转载于其他网站,本站不以此文作为商业用途
如有涉及侵权,请联系本站进行删除
转载本站原创文章,请注明来源及作者。