【嵌入式硬件】快衰减和慢衰减
孙八瓶 2024-08-03 17:35:05 阅读 51
1.引语

在使用直流有刷电机驱动芯片A4950时,这款芯片采用的是PWM控制方式,我发现他的正转、反转有两种控制方式,分别是快衰减和慢衰减。
2.理解
慢衰减:相当于加在电机(感性原件)两端电压消失,将电机两端正负短接。
快衰减:相当于加在电机(感性原件)两端电压消失,将电机两端快速接上与驱动电流相反的电流。
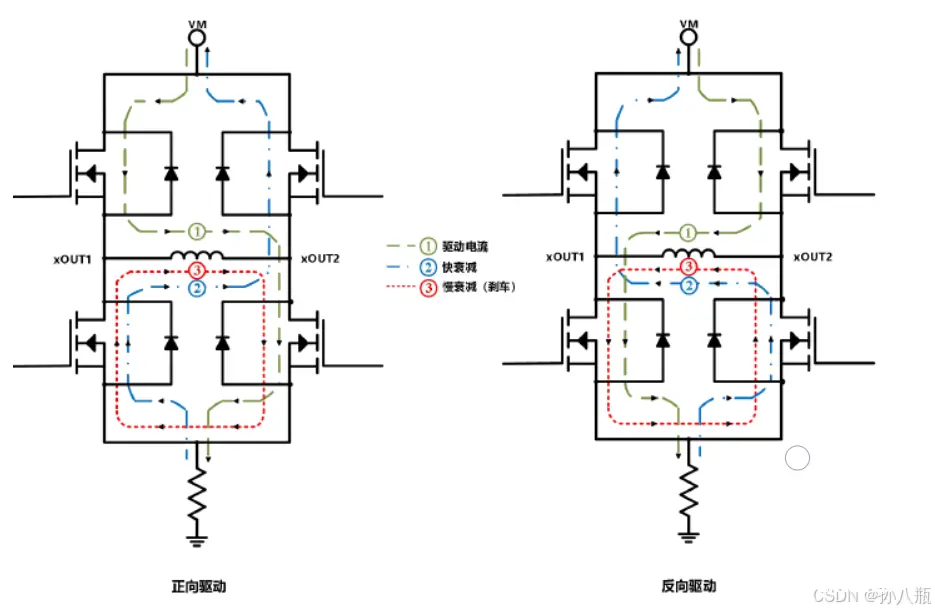
正转/快衰减,xOUT1的上桥功率管为PWM信号,下桥功率管为低电平,xOUT2的上桥臂功率管为低电平,下桥功率为高电平,电机驱动电流路径为正向驱动①所示。当有刷电机处于快衰减模式进行制动时,H桥所有功率管都关闭,电机线圈中的电流只能由功率管寄生的二极管中流过,电机电感上的电流通过路径②流进供电电源以及消耗在二极管上,因此电流会逐渐减小,这种衰减方式在电机上表现为电机滑行。
正转/慢衰减,正常驱动电流路径为正向驱动①所示,当有刷电机处于慢衰减模式进行制动时,H桥的上下桥功率管关断,下桥功率管均打开ÿ
上一篇: ElasticSearch 8.x 弃用了 High Level REST Client,移除了 Java Transport Client,推荐使用 Elasticsearch Java API
下一篇: JS 截取字符串的方法( 10种 )
本文标签
声明
本文内容仅代表作者观点,或转载于其他网站,本站不以此文作为商业用途
如有涉及侵权,请联系本站进行删除
转载本站原创文章,请注明来源及作者。