[深度学习]人工智能本科毕业设计基于yolov5的步态识别多目标跨镜头跟踪检测算法系统源码+实现过程
FL1768317420 2024-07-28 12:31:01 阅读 73
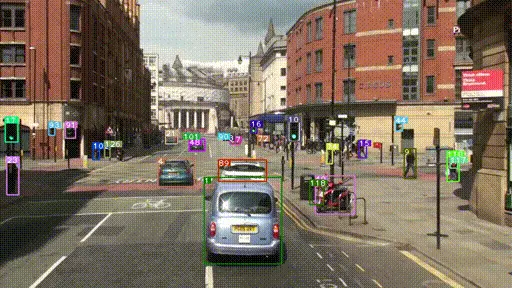
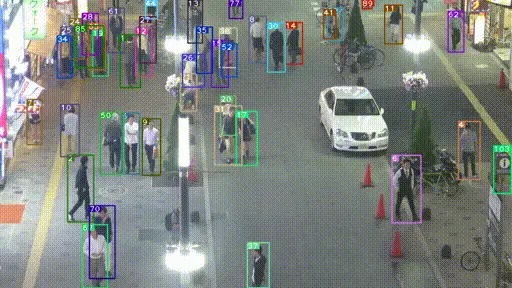
毕业设计题目:基于步态识别的多目标跨镜头跟踪算法研究 主算法:基于yoloV5-deepsort框架进行目标检测和跟踪+GaitSet算法
效果演示:
介绍
此存储库包含一个高度可配置的两阶段跟踪器,可根据不同的部署场景进行调整。YOLOv5是一系列在COCO数据集上预训练的对象检测架构和模型,它生成的检测结果被传递给跟踪对象的深度排序算法。它可以跟踪Yolov5模型训练用来检测的任何对象。
教程
Yolov5自定义数据培训(链接到外部存储库)
DeepSort深度描述符训练(链接到外部存储库)
Yolov5-pytorch评估
在运行跟踪器之前
如果您已经克隆并忘记使用--recurse子模块,则可以运行git-submodule update--init
确保满足所有要求:Python 3.8或更高版本,安装了所有requirements.txt依赖项,包括torch>=1.7。要安装,请运行:
pip install-r requirements.txt
追踪源
视频推理
$ python track.py --source 0 # webcam
img.jpg # image
vid.mp4 # video
path/ # directory
path/*.jpg # glob
'https://youtu.be/Zgi9g1ksQHc' # YouTube
'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP stream
选择对象检测和ReID模型
Yolov5
模型推理速度和准确性之间存在明显的权衡。为了满足您的推理速度/准确性需求,您可以选择Yolov5模型进行自动下载
python track.py --source 0 --yolo_model yolov5n.pt --img 640
yolov5s.pt
yolov5m.pt
yolov5l.pt
yolov5x.pt --img 1280
...
DeepSort
以上内容也适用于DeepSort模型。根据您的需求从ReID模型动物园选择ReID模型
python track.py --source 0 --deep_sort_model osnet_x0_5_market1501
resnet50_MSMT17
mobilenetv2_x1_4_dukemtmcreid
...
筛选跟踪的类
默认情况下,跟踪器跟踪所有MS COCO类。
如果你只想跟踪别人,我建议你使用这些重量来提高表现
python3 track.py --source 0 --yolo_model yolov5/weights/crowdhuman_yolov5m.pt --classes 0 # tracks persons, only
如果要跟踪MS COCO类的子集,请在classes标志后面添加它们相应的索引
python3 track.py --source 0 --yolo_model yolov5s.pt --classes 16 17 # tracks cats and dogs, only
以下是在MS COCO上训练的Yolov5模型可以检测到的所有可能对象的列表。请注意,此repo中类的索引从零开始。
符合MOT的结果
可以通过保存到您的实验文件夹track/exN
python3 track.py--source --save-txt
核心代码track.py
<code># limit the number of cpus used by high performance libraries
import os
os.environ["OMP_NUM_THREADS"] = "1"
os.environ["OPENBLAS_NUM_THREADS"] = "1"
os.environ["MKL_NUM_THREADS"] = "1"
os.environ["VECLIB_MAXIMUM_THREADS"] = "1"
os.environ["NUMEXPR_NUM_THREADS"] = "1"
import sys
sys.path.insert(0, './yolov5')
import argparse
import os
import platform
import shutil
import time
from pathlib import Path
import cv2
import torch
import torch.backends.cudnn as cudnn
from yolov5.models.experimental import attempt_load
from yolov5.utils.downloads import attempt_download
from yolov5.models.common import DetectMultiBackend
from yolov5.utils.datasets import LoadImages, LoadStreams
from yolov5.utils.general import (LOGGER, check_img_size, non_max_suppression, scale_coords,
check_imshow, xyxy2xywh, increment_path)
from yolov5.utils.torch_utils import select_device, time_sync
from yolov5.utils.plots import Annotator, colors, save_one_box,save_one_boxmod
from deep_sort.utils.parser import get_config
from deep_sort.deep_sort import DeepSort
FILE = Path(__file__).resolve()
ROOT = FILE.parents[0] # yolov5 deepsort root directory
if str(ROOT) not in sys.path:
sys.path.append(str(ROOT)) # add ROOT to PATH
ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
def detect(opt):
out, source, yolo_model, deep_sort_model, show_vid, save_vid, save_txt, imgsz, evaluate, half, project, name, exist_ok= \
opt.output, opt.source, opt.yolo_model, opt.deep_sort_model, opt.show_vid, opt.save_vid, \
opt.save_txt, opt.imgsz, opt.evaluate, opt.half, opt.project, opt.name, opt.exist_ok
webcam = source == '0' or source.startswith(
'rtsp') or source.startswith('http') or source.endswith('.txt')
device = select_device(opt.device)
# initialize deepsort
cfg = get_config()
cfg.merge_from_file(opt.config_deepsort)
deepsort = DeepSort(deep_sort_model,
device,
max_dist=cfg.DEEPSORT.MAX_DIST,
max_iou_distance=cfg.DEEPSORT.MAX_IOU_DISTANCE,
max_age=cfg.DEEPSORT.MAX_AGE, n_init=cfg.DEEPSORT.N_INIT, nn_budget=cfg.DEEPSORT.NN_BUDGET,
)
# Initialize
half &= device.type != 'cpu' # half precision only supported on CUDA
# The MOT16 evaluation runs multiple inference streams in parallel, each one writing to
# its own .txt file. Hence, in that case, the output folder is not restored
if not evaluate:
if os.path.exists(out):
pass
shutil.rmtree(out) # delete output folder
os.makedirs(out) # make new output folder
# Directories
if type(yolo_model) is str:
exp_name = yolo_model.split(".")[0]
elif type(yolo_model) is list and len(yolo_model) == 1:
exp_name = yolo_model[0].split(".")[0]
else:
exp_name = "ensemble"
exp_name = exp_name + "_" + deep_sort_model.split('/')[-1].split('.')[0]
save_dir = increment_path(Path(project) / "out", exist_ok=exist_ok) # increment run if project name exists
save_dir.mkdir(parents=True, exist_ok=True) # make dir
# Load model
device = select_device(device)
model = DetectMultiBackend(yolo_model, device=device, dnn=opt.dnn)
stride, names, pt, jit, _ = model.stride, model.names, model.pt, model.jit, model.onnx
imgsz = check_img_size(imgsz, s=stride) # check image size
# Half
half &= pt and device.type != 'cpu' # half precision only supported by PyTorch on CUDA
if pt:
model.model.half() if half else model.model.float()
# Set Dataloader
vid_path, vid_writer = None, None
# Check if environment supports image displays
if show_vid:
show_vid = check_imshow()
# Dataloader
if webcam:
show_vid = check_imshow()
cudnn.benchmark = True # set True to speed up constant image size inference
dataset = LoadStreams(source, img_size=imgsz, stride=stride, auto=pt and not jit)
bs = len(dataset) # batch_size
else:
dataset = LoadImages(source, img_size=imgsz, stride=stride, auto=pt and not jit)
bs = 1 # batch_size
vid_path, vid_writer = [None] * bs, [None] * bs
# Get names and colors
names = model.module.names if hasattr(model, 'module') else model.names
# extract what is in between the last '/' and last '.'
txt_file_name = source.split('/')[-1].split('.')[0]
txt_path = str(Path(save_dir)) + '/' + txt_file_name + '.txt'
if pt and device.type != 'cpu':
model(torch.zeros(1, 3, *imgsz).to(device).type_as(next(model.model.parameters()))) # warmup
dt, seen = [0.0, 0.0, 0.0, 0.0], 0
index = 1
for frame_idx, (path, img, im0s, vid_cap, s) in enumerate(dataset):
t1 = time_sync()
img = torch.from_numpy(img).to(device)
img = img.half() if half else img.float() # uint8 to fp16/32
img /= 255.0 # 0 - 255 to 0.0 - 1.0
if img.ndimension() == 3:
img = img.unsqueeze(0)
t2 = time_sync()
dt[0] += t2 - t1
# Inference yolo处理
visualize = increment_path(save_dir / Path(path[0]).stem, mkdir=True) if opt.visualize else False
pred = model(img, augment=opt.augment, visualize=visualize)
t3 = time_sync()
dt[1] += t3 - t2
# Apply NMS
pred = non_max_suppression(pred, opt.conf_thres, opt.iou_thres, opt.classes, opt.agnostic_nms, max_det=opt.max_det)
dt[2] += time_sync() - t3
# Process detections
for i, det in enumerate(pred): # detections per image
seen += 1
if webcam: # batch_size >= 1
p, im0, _ = path[i], im0s[i].copy(), dataset.count
s += f'{i}: '
else:
p, im0, _ = path, im0s.copy(), getattr(dataset, 'frame', 0)
p = Path(p) # to Path
save_path = str(save_dir / p.name) # im.jpg, vid.mp4, ...
s += '%gx%g ' % img.shape[2:] # print string
imc = im0.copy()
# 画框
annotator = Annotator(im0, line_width=1, pil=not ascii)
if det is not None and len(det):
# Rescale boxes from img_size to im0 size
det[:, :4] = scale_coords(
img.shape[2:], det[:, :4], im0.shape).round()
# Print results
for c in det[:, -1].unique():
n = (det[:, -1] == c).sum() # detections per class
s += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string
xywhs = xyxy2xywh(det[:, 0:4])
confs = det[:, 4]
clss = det[:, 5]
# Deepsort 处理 pass detections to deepsort
t4 = time_sync()
outputs = deepsort.update(xywhs.cpu(), confs.cpu(), clss.cpu(), im0)
t5 = time_sync()
dt[3] += t5 - t4
# index = 0
# for *xyxy, conf, cls in reversed(det):
# save_one_box(xyxy, imc, file=save_dir / 'person' /str(output[4])/ f'{index}.jpg', BGR=True)
# index = index + 1
# draw boxes for visualization
if len(outputs) > 0:
for j, (output, conf) in enumerate(zip(outputs, confs)):
bboxes = output[0:4]
# 这里的ID就是画面中任务头上的ID
id = output[4]
cls = output[5]
c = int(cls) # integer class
label = f'{id} {names[c]} {conf:.2f}'
# Todo 保存每一帧检测框中的图片
bgrImg = cv2.imread('./data/back.jpg')
# print(bgrImg)
# save_one_box(bboxes, imc,file=save_dir / 'person' / str(id)/ f'{index}.jpg', BGR=True)
save_one_boxmod(bboxes, imc,bgrImg,file=save_dir / 'person' / str(id)/ 'temp'/f'{index}.jpg',
lasted=save_dir / 'person' / str(id)/f'{index}.jpg', BGR=True)
index = index+1
# 画标记
annotator.box_label(bboxes, label, color=colors(c, True))
if save_txt:
# to MOT format
bbox_left = output[0]
bbox_top = output[1]
bbox_w = output[2] - output[0]
bbox_h = output[3] - output[1]
# Write MOT compliant results to file
with open(txt_path, 'a') as f:
f.write(('%g ' * 10 + '\n') % (frame_idx + 1, id, bbox_left, # MOT format
bbox_top, bbox_w, bbox_h, -1, -1, -1, -1))
LOGGER.info(f'{s}Done. YOLO:({t3 - t2:.3f}s), DeepSort:({t5 - t4:.3f}s)')
else:
deepsort.increment_ages()
LOGGER.info('No detections')
# Stream results
im0 = annotator.result()
if show_vid:
cv2.imshow(str(p), im0)
if cv2.waitKey(1) == ord('q'): # q to quit
raise StopIteration
# Save results (image with detections)
if save_vid:
if vid_path != save_path: # new video
vid_path = save_path
if isinstance(vid_writer, cv2.VideoWriter):
vid_writer.release() # release previous video writer
if vid_cap: # video
fps = vid_cap.get(cv2.CAP_PROP_FPS)
w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))
h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
else: # stream
fps, w, h = 30, im0.shape[1], im0.shape[0]
vid_writer = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*'mp4v'), fps, (w, h))
vid_writer.write(im0)
# Print results
t = tuple(x / seen * 1E3 for x in dt) # speeds per image
LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS, %.1fms deep sort update \
per image at shape {(1, 3, *imgsz)}' % t)
if save_txt or save_vid:
print('Results saved to %s' % save_path)
if platform == 'darwin': # MacOS
os.system('open ' + save_path)
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--yolo_model', nargs='+', type=str, default='yolov5m.pt', help='model.pt path(s)')code>
parser.add_argument('--deep_sort_model', type=str, default='osnet_ibn_x1_0_MSMT17')code>
parser.add_argument('--source', type=str, default='0', help='source') # file/folder, 0 for webcamcode>
parser.add_argument('--output', type=str, default='inference/output', help='output folder') # output foldercode>
parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640], help='inference size h,w')code>
parser.add_argument('--conf-thres', type=float, default=0.5, help='object confidence threshold')code>
parser.add_argument('--iou-thres', type=float, default=0.5, help='IOU threshold for NMS')code>
parser.add_argument('--fourcc', type=str, default='mp4v', help='output video codec (verify ffmpeg support)')code>
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')code>
parser.add_argument('--show-vid', action='store_true', help='display tracking video results')code>
parser.add_argument('--save-vid', action='store_true', help='save video tracking results')code>
parser.add_argument('--save-txt', action='store_true', help='save MOT compliant results to *.txt')code>
# class 0 is person, 1 is bycicle, 2 is car... 79 is oven
parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --class 0, or --class 16 17')code>
parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')code>
parser.add_argument('--augment', action='store_true', help='augmented inference')code>
parser.add_argument('--evaluate', action='store_true', help='augmented inference')code>
parser.add_argument("--config_deepsort", type=str, default="deep_sort/configs/deep_sort.yaml")code>
parser.add_argument("--half", action="store_true", help="use FP16 half-precision inference")code>
parser.add_argument('--visualize', action='store_true', help='visualize features')code>
parser.add_argument('--max-det', type=int, default=1000, help='maximum detection per image')code>
parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')code>
parser.add_argument('--project', default=ROOT / 'runs/track', help='save results to project/name')code>
parser.add_argument('--name', default='exp', help='save results to project/name')code>
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')code>
opt = parser.parse_args()
opt.imgsz *= 2 if len(opt.imgsz) == 1 else 1 # expand
with torch.no_grad():
detect(opt)
完整代码下载地址:https://download.csdn.net/download/FL1768317420/89232934
上一篇: Gradio 教程四:Building Generative AI Applications with Gradio
下一篇: 探索未来麻将世界:MajsoulAI —— 雀魂智能助手
本文标签
声明
本文内容仅代表作者观点,或转载于其他网站,本站不以此文作为商业用途
如有涉及侵权,请联系本站进行删除
转载本站原创文章,请注明来源及作者。