[RL] Actor-Critic、A2C、A3C、DDPG、TD3基础概述
我思故我在Fighting 2024-09-10 15:31:01 阅读 85
好几个月之前学的了,当时手懒没总结,突然闲下来把笔记补上
Introduction
之前讲解了基于值函数的方法和基于策略的方法,基于值函数的方法只学习一个价值函数,而基于策略的方法只学习一个策略函数。Actor-Critic价值函数策略函数都学习。Actor-Critic 是囊括一系列算法的整体架构,Actor-Critic 算法本质上是基于策略的算法,因为这一系列算法的目标都是优化一个带参数的策略,只是会额外学习价值函数,帮助策略函数更好地学习。
回顾一下,在 REINFORCE 算法中,目标函数的梯度中有一项轨迹回报,指导策略的更新。REINFOCE 算法用蒙特卡洛方法来估计
Q
(
s
,
a
)
Q(s,a)
Q(s,a),Actor-Critic 算法拟合一个值函数来指导策略进行学习。在策略梯度中,可以把梯度写成下面这个更加一般的形式:

REINFORCE 通过蒙特卡洛采样的方法对策略梯度的估计是无偏的,但是方差非常大。可以用形式(3)引入基线函数(baseline function)
b
(
s
t
)
b(s_t)
b(st)来减小方差。也可以采用 Actor-Critic 算法估计一个动作价值函数
Q
Q
Q,代替蒙特卡洛采样得到的回报,便是形式(4)。可以把状态价值函数
V
V
V作为基线,从
Q
Q
Q函数减去这个
V
V
V函数则得到
A
A
A函数,我们称之为优势函数(advantage function),是形式(5)。更进一步,我们可以利用等式
Q
=
r
+
γ
V
Q=r+\gamma V
Q=r+γV得到形式(6)。围绕这几种形式讲,主要还是时序差分残差
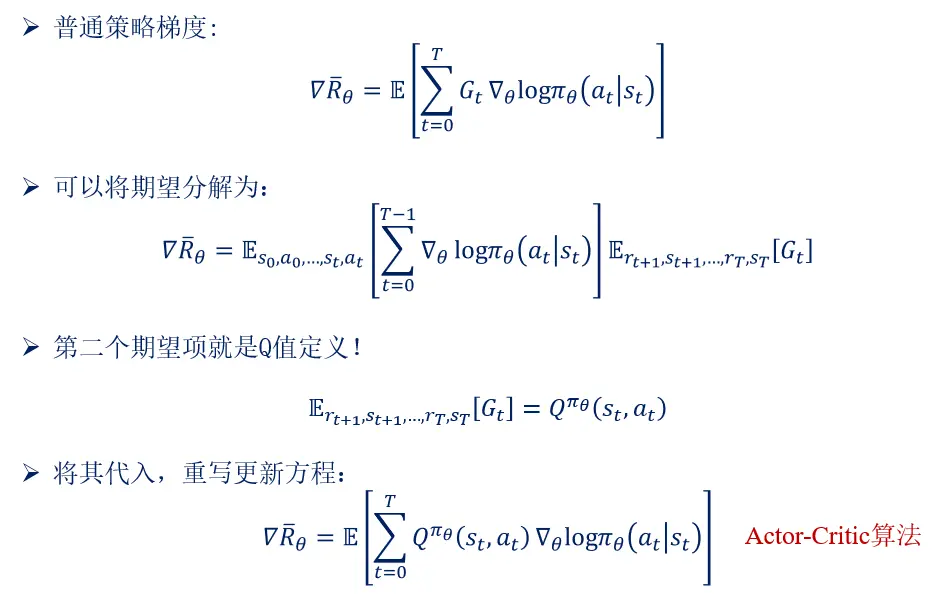
一、Actor-Critic推导
AC就是轨迹回报用Q值拟合
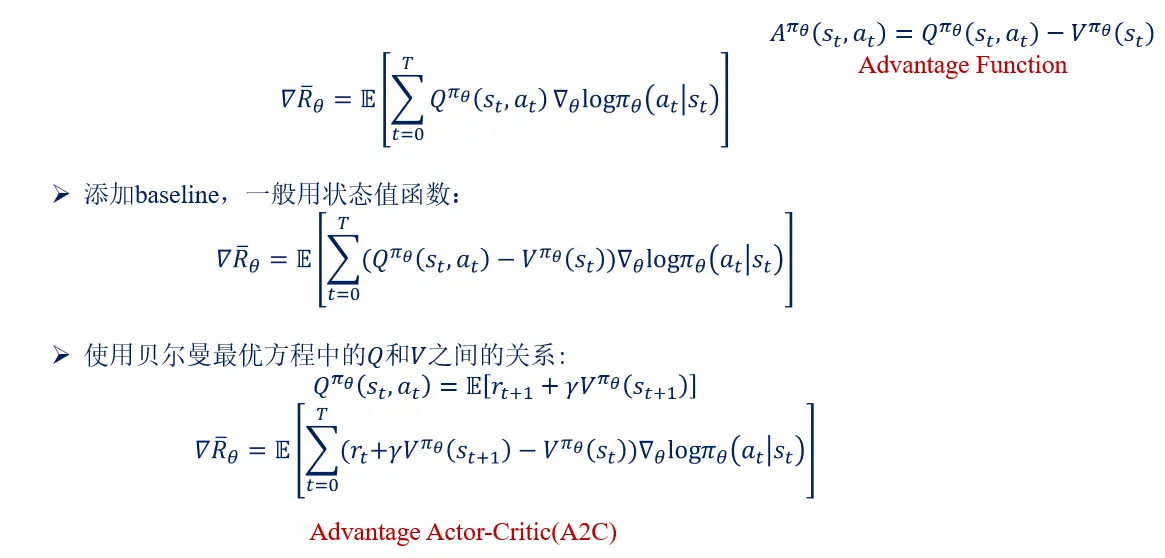
二、Advantage Actor-Critic
A2C加个baseline,减小方差,让权重有正有负,使用优势函数代替Critic网络中的原始回报,可以作为衡量选取动作值和所有动作平均值好坏的指标。
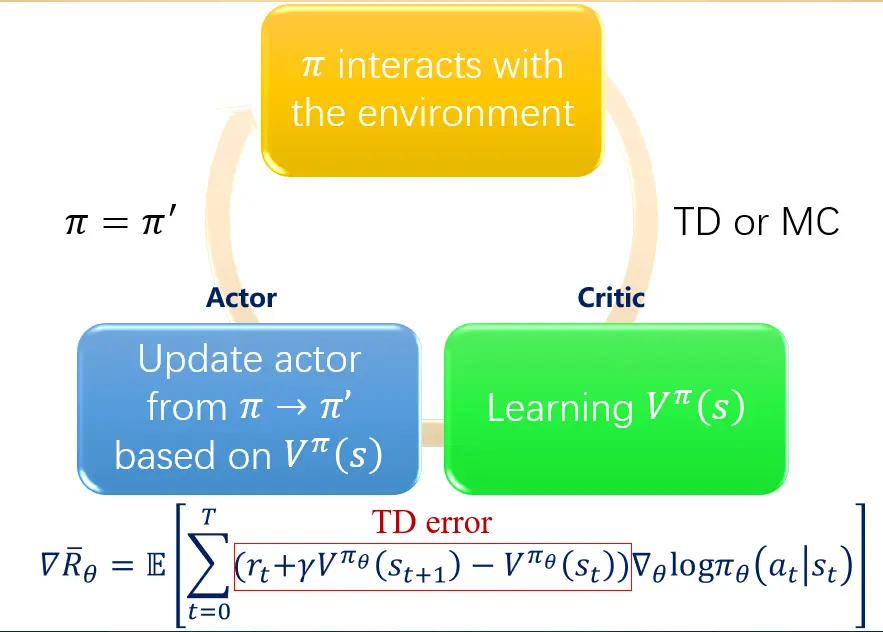
将 Actor-Critic 分为两个部分:Actor(策略网络)和 Critic(价值网络)
Actor 要做的是与环境交互,并在 Critic 价值函数的指导下用策略梯度学习一个更好的策略。Critic 通过 Actor 与环境交互收集的数据学习一个价值函数,用于评估在当前状态策略好坏,帮助 Actor 进行策略更新。


Tips:一、需要估计两个网络:V 网络和Actor的策略网络,它们前面几个层(layer)可以共享,比如输入图像前期都用一些卷积神经网络处理,把图像抽象成高级(high level)信息,对于Actor-Critic来说是可以共用的。 二、在Actor-Critic中,对 π 输出的分布设置一个约束,使分布的**熵(entropy)**不能太小,熵用于衡量策略在选择动作时的随机性程度,也就是希望不同的动作被采用的概率平均一些。可以促使策略保持一定的探索性,以便更好地探索环境并学习到更好的策略。

三、Asynchronous Advantage Actor-Critic (A3C)
一种异步梯度优化框架,神经网络与强化学习算法相结合可以让算法更有效,但稳定性较差。通常使用经验回放来去除数据的相关性,让训练更加稳定。但只适用于(off-policy)强化学习算法。A3C使用异步并行,多个(actor/worker)并行可以采取不同的策略与环境互动去除数据相关性,代替经验回放技术,这使得框架可以用于同策略方法
异步(Asynchronous):在A3C中,会创建多个并行的环境, 有一个全局网络(global network)和多个工作智能体(worker),每个智能体都有自己的网络参数集(一开始是全局网络的副本)。并行训练,每个worker同时与自己的环境副本交互,更新主结构中的参数. 并行中的 worker 们独立、互不干扰, 而主结构的参数更新受到副结构提交更新的不连续性干扰, 所以更新的相关性被降低, 收敛性提高.
使用Hogwild!作为更新方法。Hogwild!是一种并行更新的方法,其中多个线程可能会同时更新共享参数。这种并行更新可能会导致线程间的冲突,比如在线程1加载全局参数w1之后,线程2还没等线程1存储全局参数更新后的值,就也对全局参数w1进行加载,这样导致每个线程都会存储值对W1计算的的更新后的全局参数值,直观的感觉是这应该会对学习的过程产生负面影响。但当对模型访问的稀疏性(sparity)做一定的限定后,这种访问冲突实际上是非常有限的。这正是Hogwild!算法收敛性存在的理论依据。异步SGD和Hogwild!算法

在计算策略的优势时,采用前向视角(forward view)的n步回报,而不是后向视角(backward view)。的别在于如何计算多步的奖励。

路径衍生策略梯度(pathwise derivative policy gradient)
另一种策略梯度的方法pathwise derivative策略梯度,应用到确定性策略的环境,用Qlearning求解连续动作的方法。
例子:SVG:将pathwise derivative(PD)应用到MDP中
漫谈重参数:从正态分布到Gumbel Softmax
Advanced Policy Gradient - pathwise derivative
四、DDPG
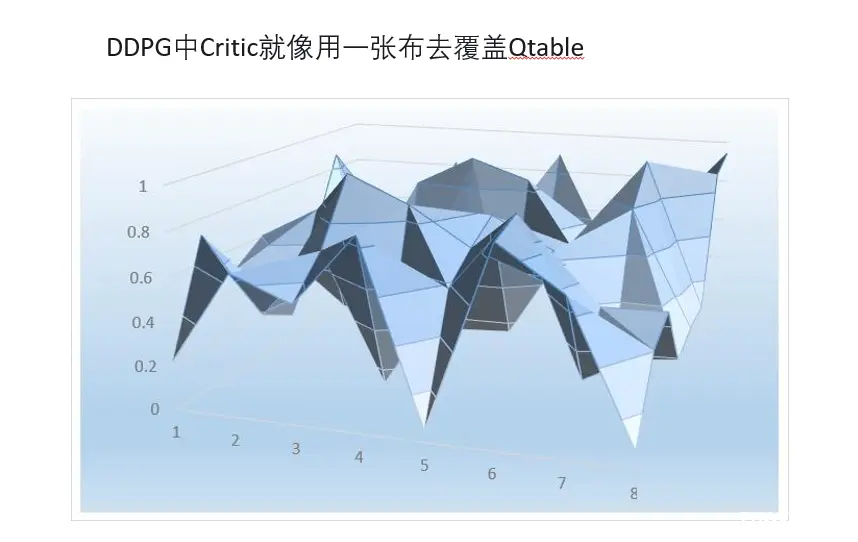
形象地理解DDPG。
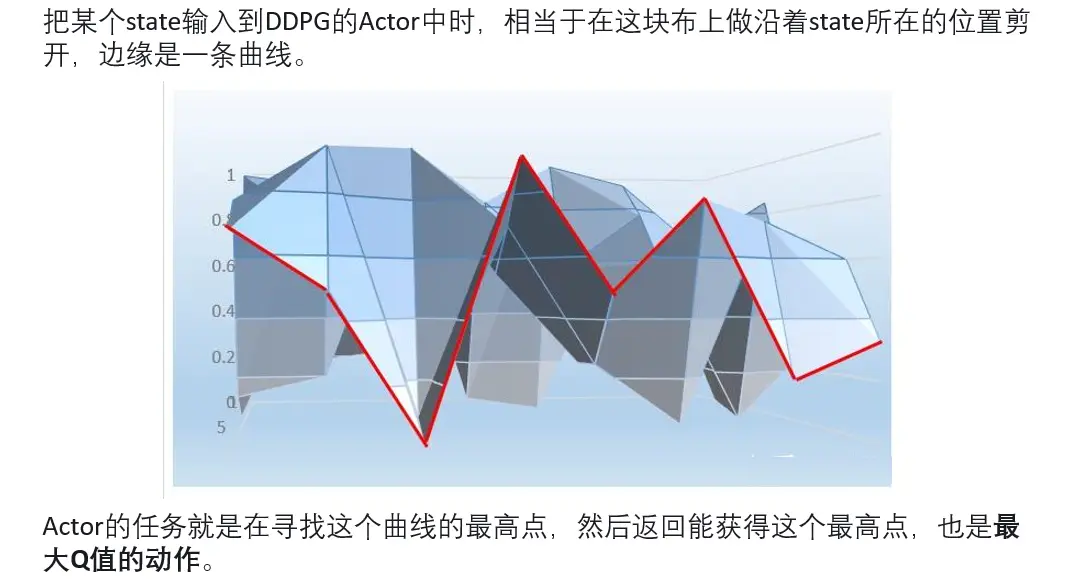
DDPG中Critic(拟合Q值的网络)就像用一张布去覆盖的Qtable。当把某个state输入到DDPG的Actor中的时候,相当于在这块布上做沿着state所在的位置剪开,边缘是一条曲线。曲线是在某个状态下,选择某个动作值的时候,能获得的Q值。Actor的任务就是在寻找这个曲线的最高点,然后返回能获得这个最高点,也是最大Q值的动作。

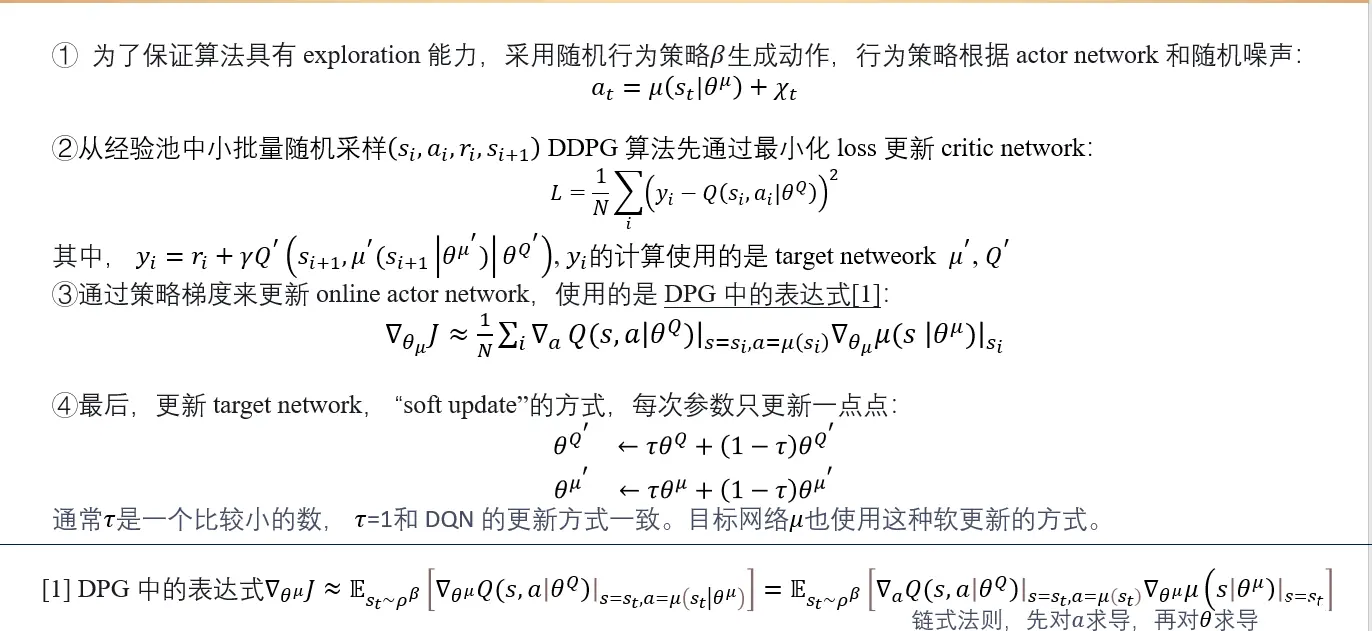
DDPG深度确定性策略梯度(deep deterministic policy gradient,DDPG)构造一个确定性策略,用梯度上升的方法来最大化
Q
Q
Q值。DDPG 也属于一种 Actor-Critic 算法。之前学习的 REINFORCE、 PPO 学习随机性策略,而 DDPG 学习一个确定性策略。更新策略用的不是V,是Q
DQN不能用于连续控制问题原因,DQN用神经网络解决了Qlearning不能解决的连续状态空间问题。那同样的DDPG就是用策略网络Actor解决DQN不能解决的连续动作问题。用一策略网络直接替代maxQ(s’,a’)的功能。输入状态s,策略网络Actor返回动作action的取值(力矩),这个取值能够让q值最大,通过梯度上升更新策略网络。Critic网络的作用是预估Q,不是V;

在实做的时候,需要4个网络。actor, critic, Actor_target, cirtic_target。
Deep Deterministic Policy Gradient (DDPG)
DDPG流程:


五、Twin Delayed DDPG(TD3)双延迟深度确定性策略梯度
TD3:DDPG的改进,改进了三个方面
(一)double network
高估问题,本质还是DQN,DQN中采用max操作由于神经网络的误差啊会产生过估计问题,在DDPG中使用了一个Actor策略网络代替max操作,使用梯度上升来寻找最大值,是起到了argmax的作用的,所以说这里都进行了最大值选取的操作(无论是DQN的argmax还是DDPG的梯度上升),所以还是存在高估高估。DQN中计算targetQ值使用了doubleDqn的操作来减少max的影响,TD3使用多个Critic估计Q值取小值计算targetQ,实验得到两个就够用。
在目标网络中,这两个critic估算出来的Q值会用min()函数求出较少值作为更新的目标,更新两个网络 Critic网络_1 和 Critic网络_2。这两个网络完全独立,只是都用同一个目标进行更新。(虽然更新目标一样,两个网络会越来越趋近与和实际q值相同。但由于网络参数的初始值不一样,会导致计算出来的值有所不同。所以我们可以有空间选择较小的值去估算q值,避免q值被高估。)

(二)延迟的策略更新(delayed policy updates)
延迟的策略更新:学习过程中,Q值不断变化,覆盖Qtable的布不断变形。所以Actor要寻着最高点的任务困难。比如,本来是最高点的,当actor好不容易梯度上升去到最高点;Q值更新了,不是最高点了,actor只能转头再继续寻找新的最高点,还有可能陷入局部最优。
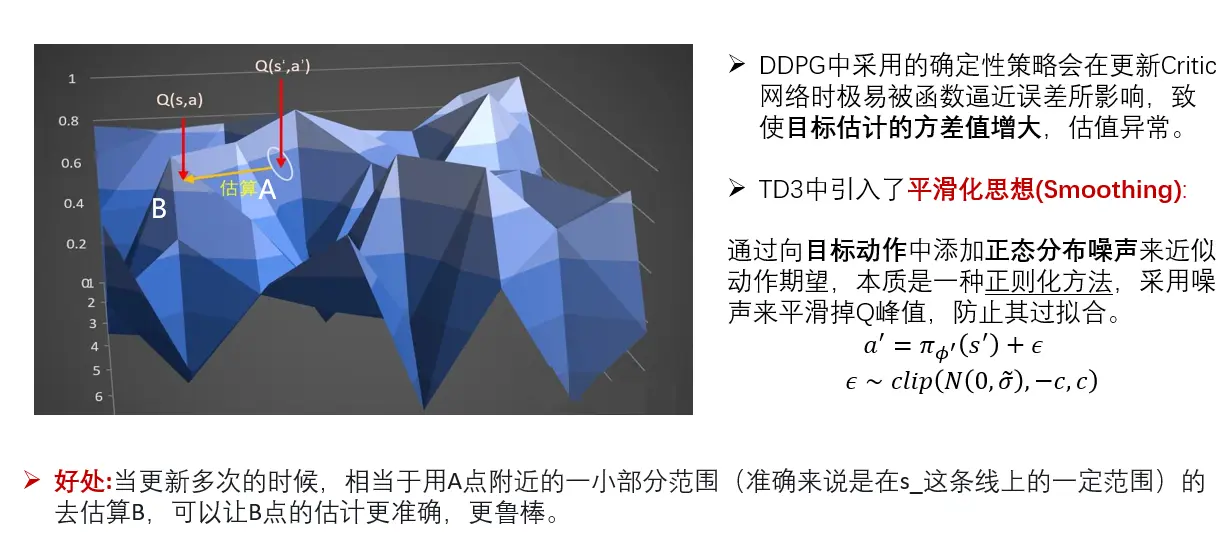
(三)目标策略平滑(target policy smoothing)
目标策略平滑,TD3不仅和DDPG一样,在探索的时候使用了探索噪声,而且还使用了策略噪声,TD3中,价值函数的更新目标每次都在action上加一个小扰动,计算targetQ时候,给targetQ网络输入s_和actor输出的a_后,给a加上噪音,让a在一定范围内随机。Q值函数的峰值往往会随着训练的进行而出现过拟合的情况,引入随机性来平滑掉Q值函数的峰值,防止其过拟合,从而提高算法的性能和稳定性。
计算target的时候,actor加上noise,是为了预估更准确,网络更有健壮性。
更新actor的时候不需要加上noise,希望actor能够寻着最大值,加上noise没有任何意义。

TD3

Advanced Policy Gradient - pathwise derivative
声明
本文内容仅代表作者观点,或转载于其他网站,本站不以此文作为商业用途
如有涉及侵权,请联系本站进行删除
转载本站原创文章,请注明来源及作者。