Zemax光学设计(一)——单透镜设计
厚切软吐司 2024-06-20 08:01:24 阅读 69
文章目录
设计需求镜头数据编辑器介绍序列模式与非序列模式系统初步设计入瞳直径(EPD)视场(Field Data)波长设置镜头设置求解 分析系统性能布局图点列图光程差图光线光扇图快速聚焦工具 优化设置求解执行优化 优化后性能
设计需求
设计优化一个玻璃材料为N-BK7,F数为4的单透镜,满足以下规格:
| 规格 | 约束 |
|---|---|
| 焦距 | 100 mm |
| 半视场角(SFOV) | 5° |
| 波长 | 632.8 nm(HeNe) |
| 中心厚度 | 2 mm ~ 12 mm |
| 边缘厚度 | > 2 mm |
| 优化标准 | 全视场 RMS 均方根半径平均值 |
| 物体位置 | 无穷远 |
镜头数据编辑器介绍

在序列模式设计中,每个光学系统从物面(OBJ)开始到像面(IMA)结束,除了物面和像面外,剩余表面必须定义为光阑(STOP)。
序列模式与非序列模式
所有光线传播发生在特定局部坐标系中的光学面。对于每个光学表面,每根光线只通过一次。以面为单位建模,多用于成像系统。指并没有预先定义光线必须到达的表面。光线是否到达某个物面完全由光线方向以及物面的物理位置和特性决定。多用于照明系统、杂散光分析。系统初步设计
通常,系统孔径是开始新设计时定义的第一个参数。主要包括入瞳直径(EPD)、像方空间F/#、物方空间NA、光阑尺寸浮动(Float By Stop Size)入瞳直径(EPD)
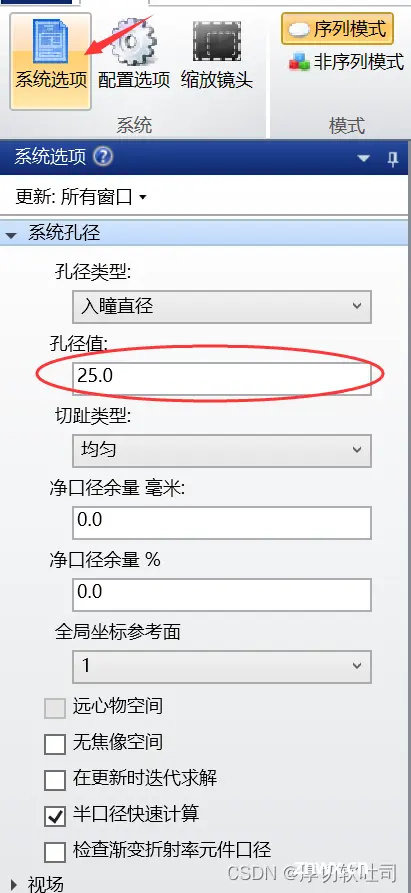
常用的系统孔径类型;入瞳直径定义为从物空间看到的光瞳直径,以镜头单位为单位;根据要求,F数为 4 ,焦距为100,根据下列公式可以计算得入瞳直径为 25 mm;
F数:镜头相对口径的倒数,相对口径等于入瞳直径除焦距。入瞳的位置由镜头的孔径光阑决定,孔径光阑限制入射到系统光束宽度大小。F数越小,说明系统的相对口径越大,进入的通光量越大,像面照度越大,曝光量越足。在软件中设计如下:
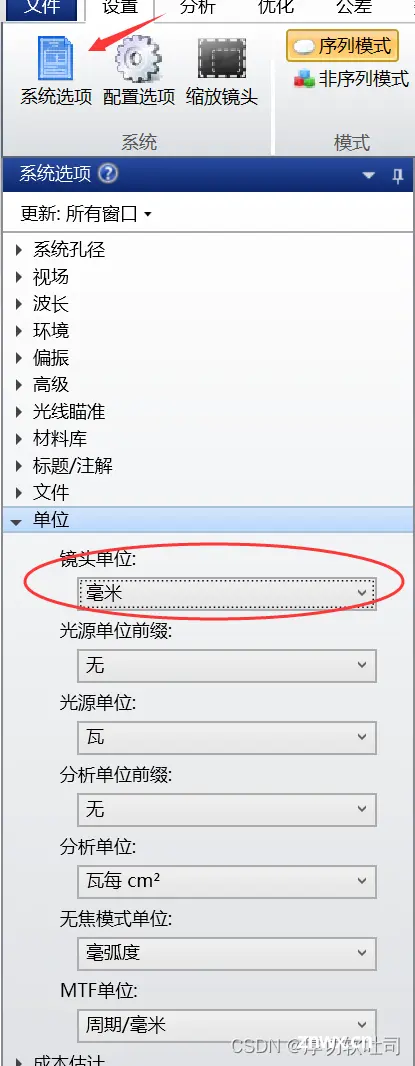
镜头单位:毫米、厘米、英寸和米,1 英寸(in)= 25.4 mm;
设计方式如下:
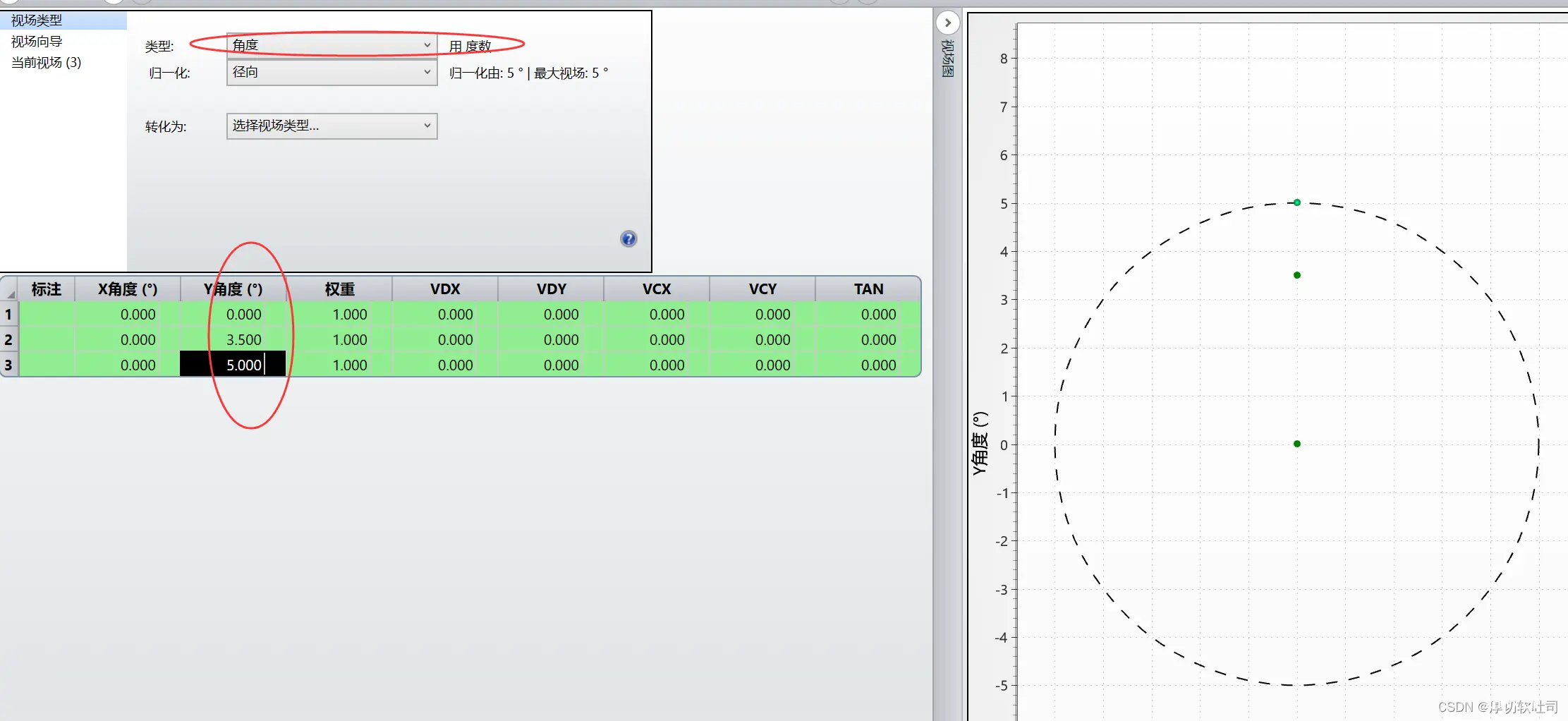
视场(Field Data)
视场数据编辑器:
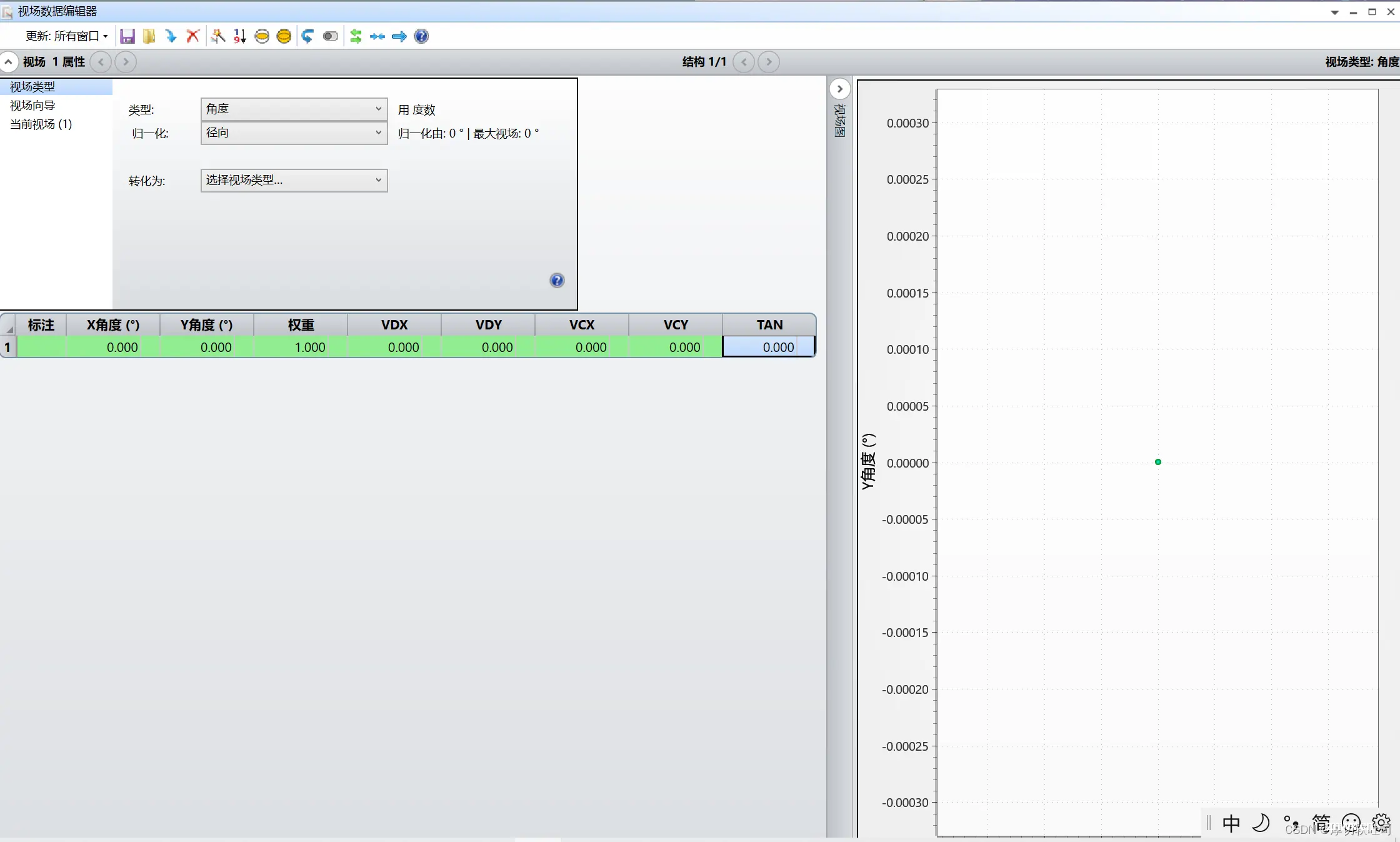
定义视场的几种模式:
| 视场类型 | 说明 |
|---|---|
| 角度 | 测量了入瞳中心的视场角。正的视场角指该方向光线为正斜率,因此指向远处物体坐标为负,可用于无限共轭 |
| 物高(Object Height) | 不能用于无限共轭情况 |
| 近轴像高(Paraxial Image Height) | 用于固定框架尺寸设计,比如照相机中的胶卷,只能用于近轴光学系统很好描述的设计 |
| 实际像高(Real Image Height) | 用于固定框架尺寸设计,光线追迹慢 |
| 经纬角(Theodolite Angle) | 利用极坐标的水平角θ与竖直角φ ,常用于测量和天文学 |
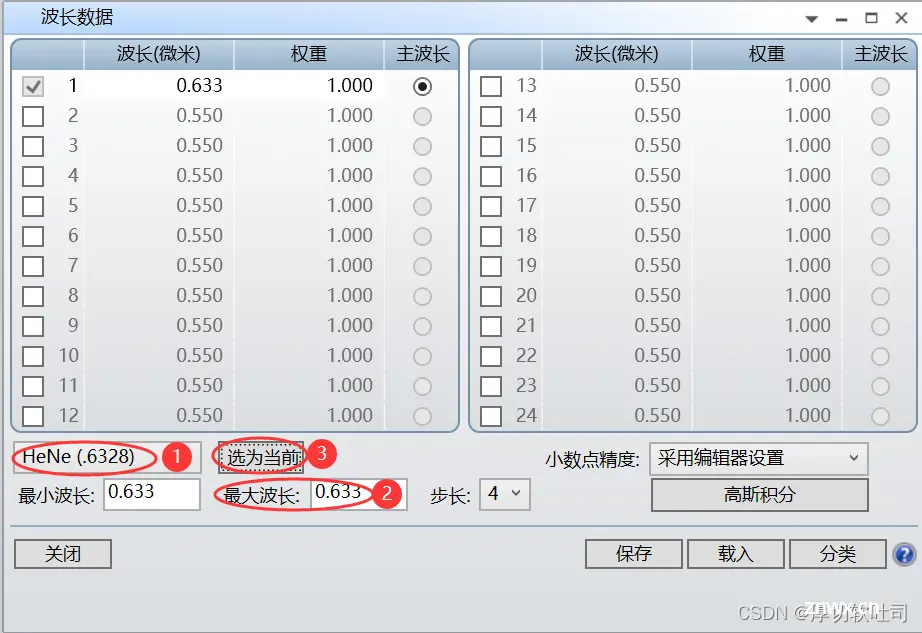
波长设置
双击波长选项下设计设置选项
镜头设置
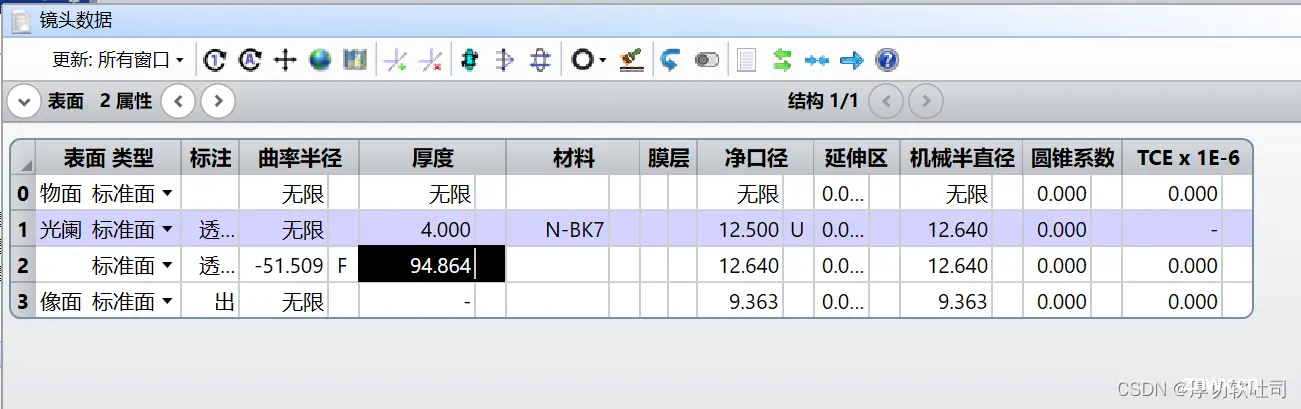
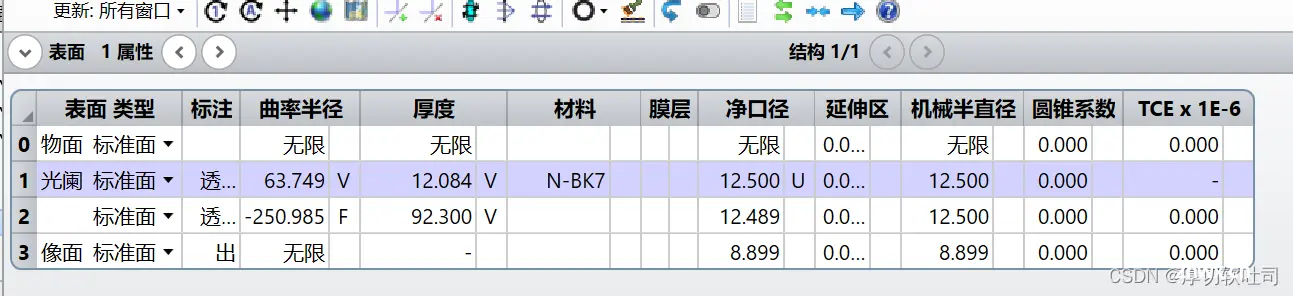
表面1的厚度表示的是沿光轴到下一表面的距离,这就称为透镜的中心厚度。作为起始点,使用 4 mm厚度,因为此为25 mm透镜的合理中心厚度,该值稍后设置为需要优化的变量;同样第一个表面的曲率半径和透镜后表面与像面与之间的厚度不需要先确定,因此设置为优化变量,暂时将表面1的曲率半径设置为无穷大,表面2的厚度设置为100 mm;求解
实现光学设计约束有两种方法:
(1)、将影响约束的参数设计为变量,并将边界约束添加到评价函数编辑器;
(2)、使用内置求解功能,消除不必要变量。
第二种方法执行速度会慢一些
本次设计求解类型选择F/# 保持需要的焦距;F数求解调节最后一个光学表面的曲率以保持系统焦距;
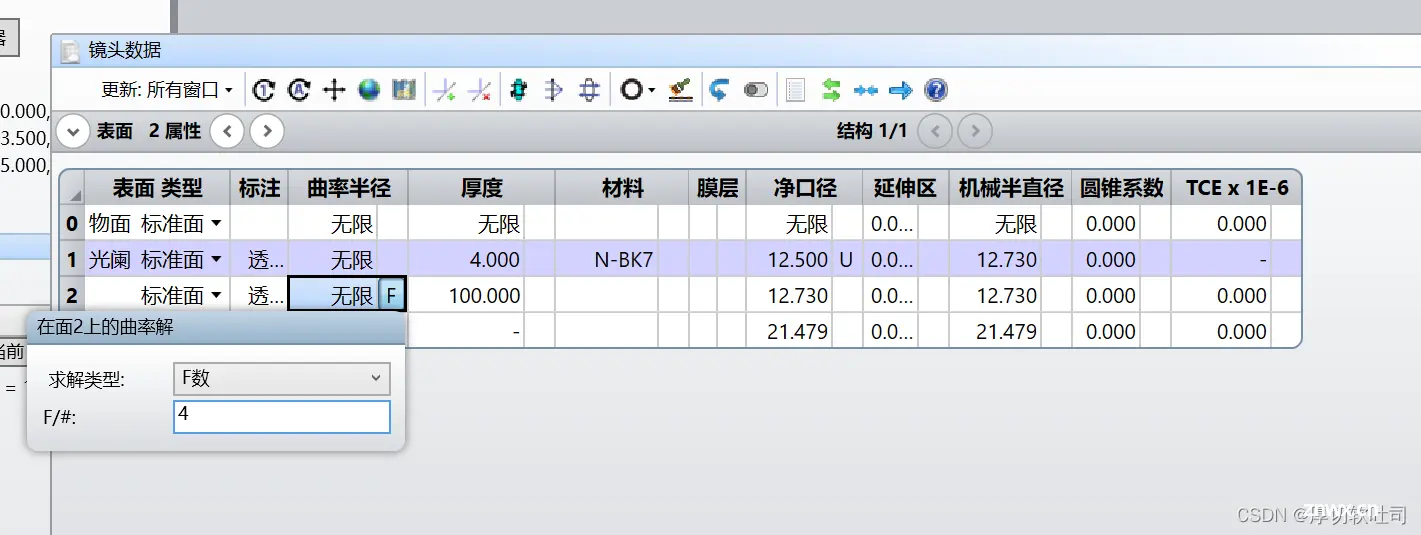
此时,曲率半径已自动计算完毕:

分析系统性能
使用四种性能分析评估设计的单透镜:
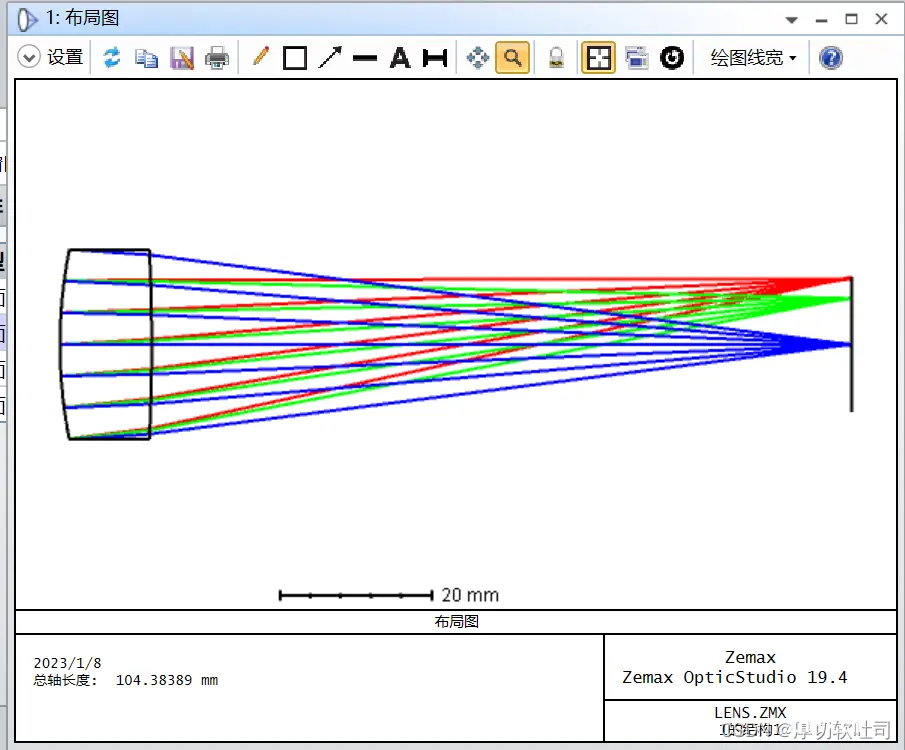
| 布局图(Layout) | 2D视图绘制了镜头的YZ截面,仅适用于旋转对称的轴对称系统 |
|---|---|
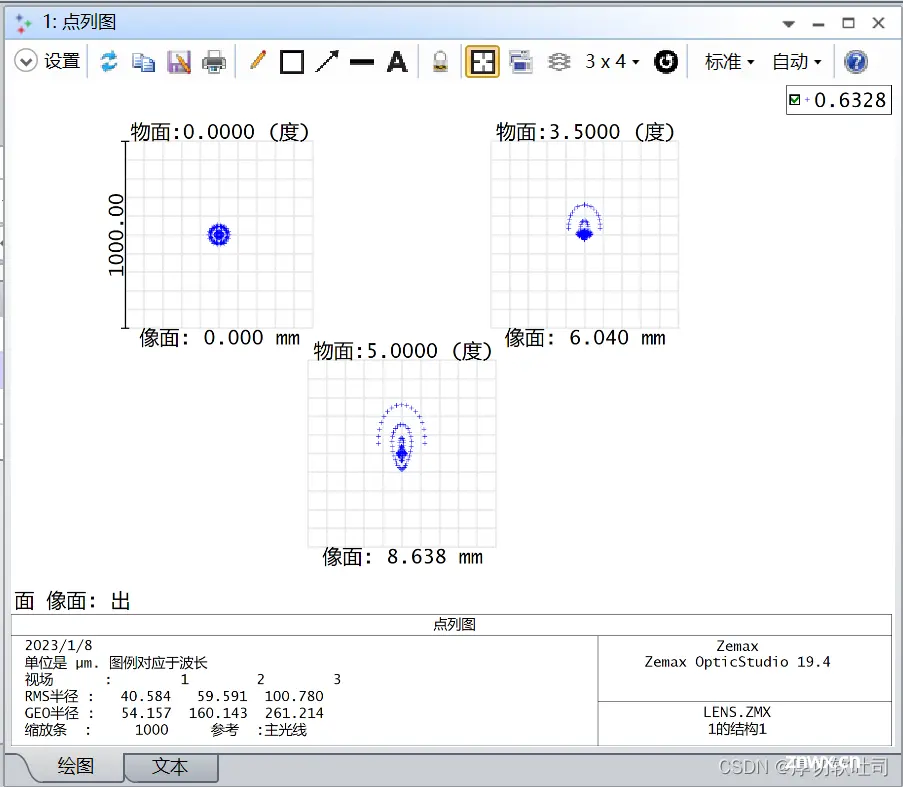
| 点列图(Spot Diagram) | 点列图表示点物体所成的像。在没有像差的情况下,点物体会收敛到一个完美的像点 |
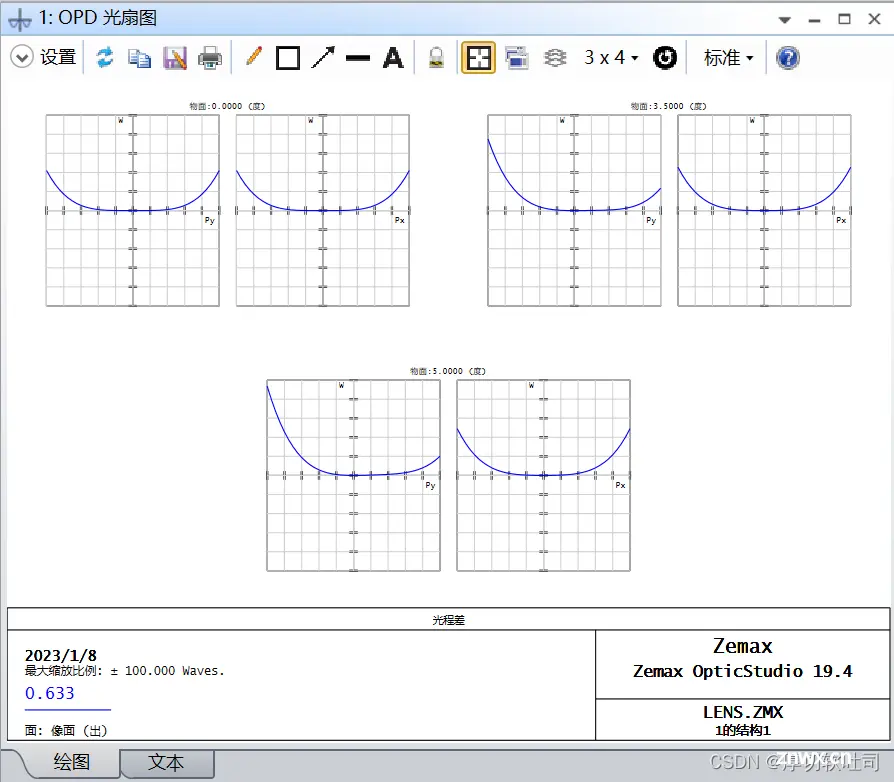
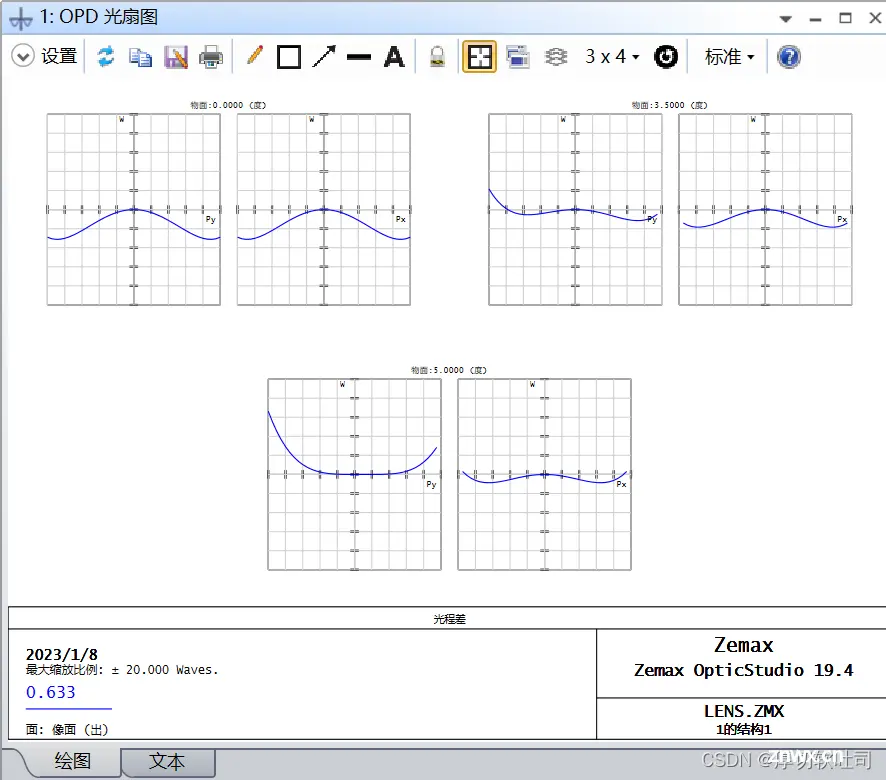
| 光程差图(OPD Fan) | 光程差图是光程差随光瞳坐标变化的曲线。在理想光学系统中,波前的光程与出瞳处无像差 |
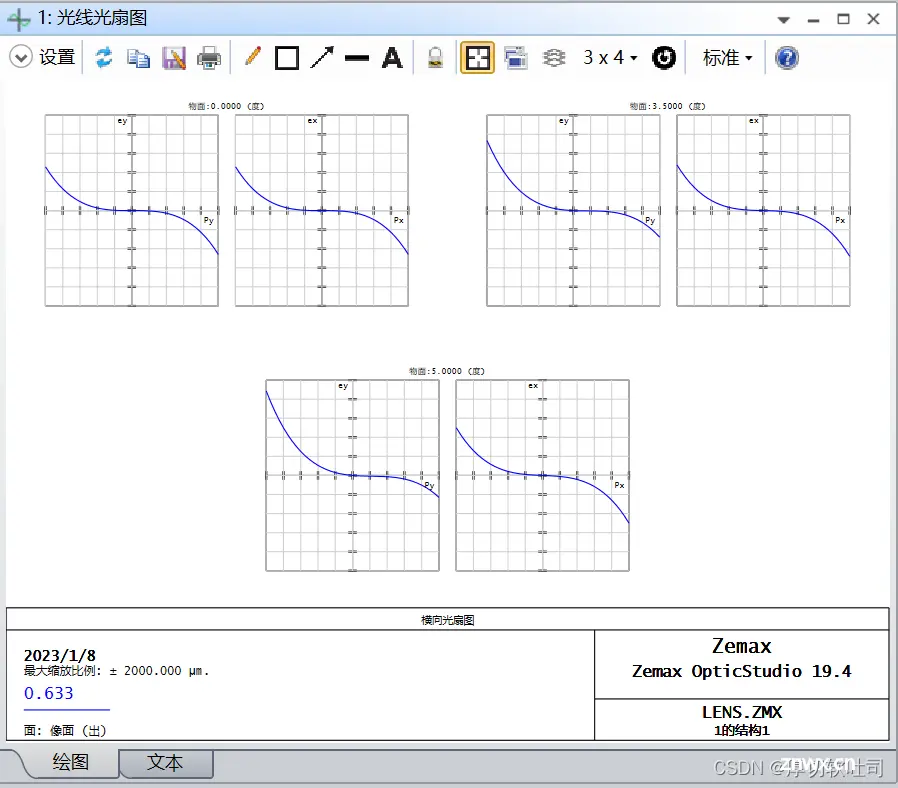
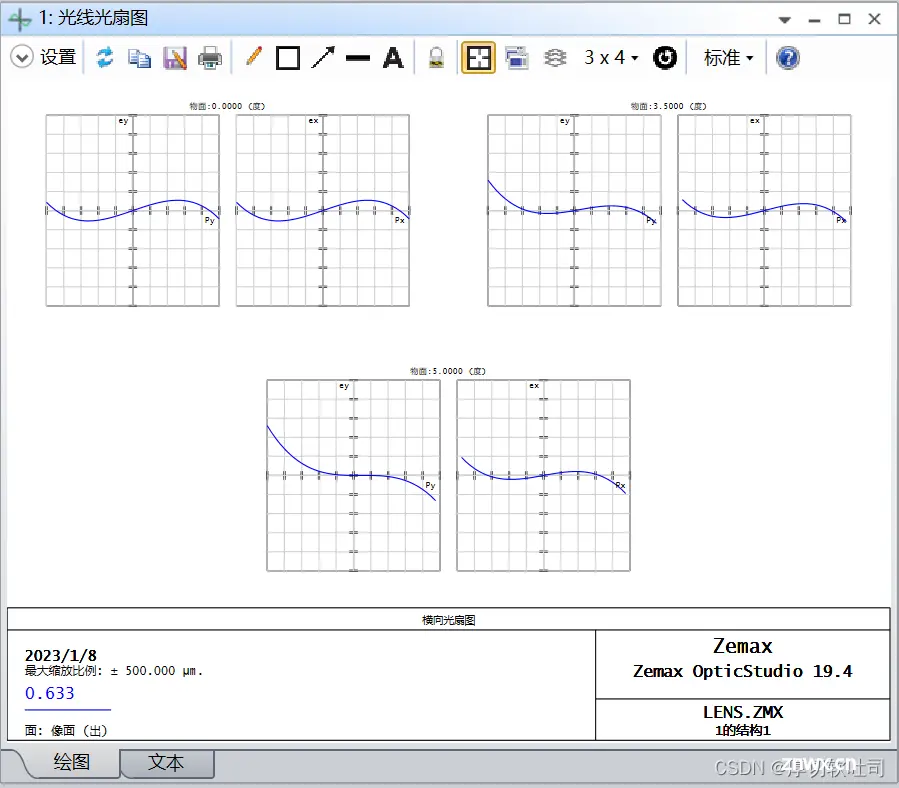
| 光线光扇图(Ray Fan) | 光线像差图是光线像差随光瞳坐标变化的曲线。一般情况下,当一条光线通过光学系统到达成像表面时,它的交点落在离主光线较小但非零的距离上。在一个完美的光学系统中,任意光瞳位置对应的光线像差上应该都是零 |
布局图
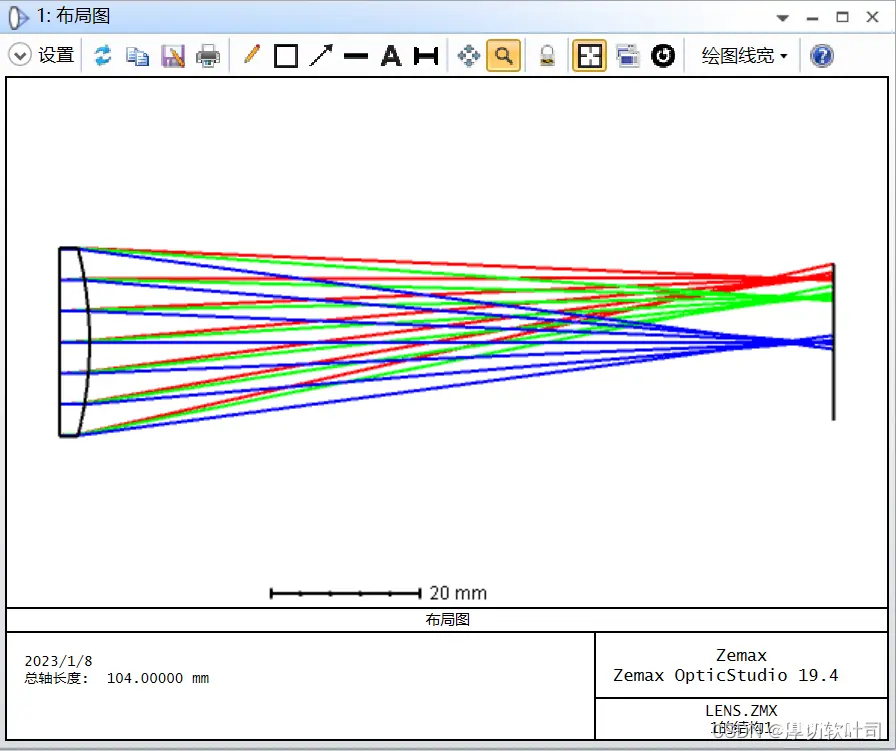
当前的像面并没有位于“最佳焦点”
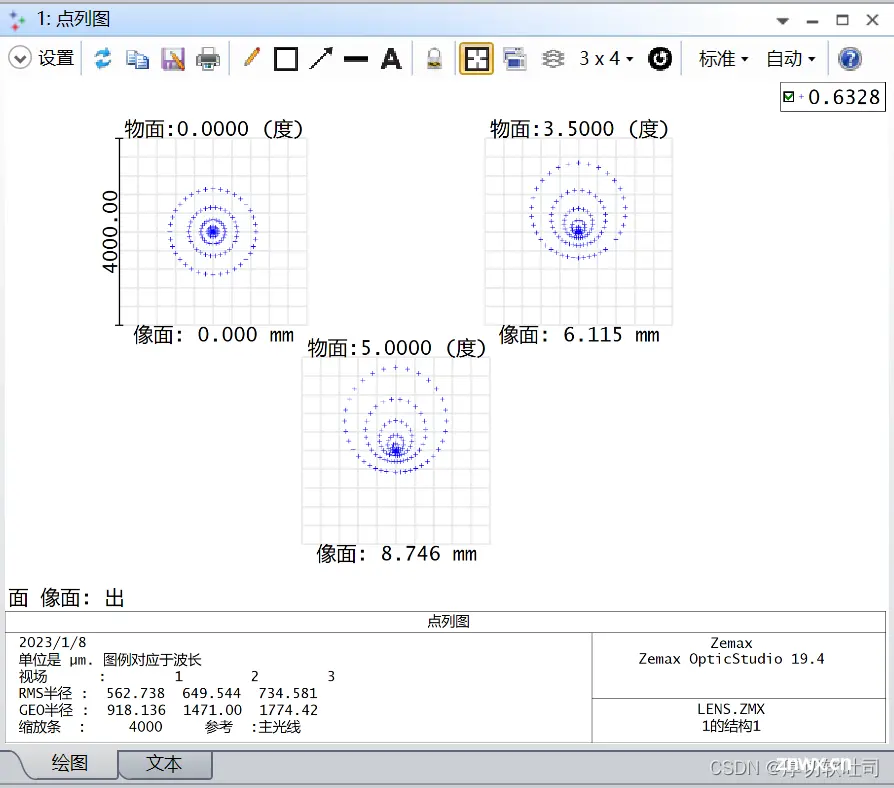
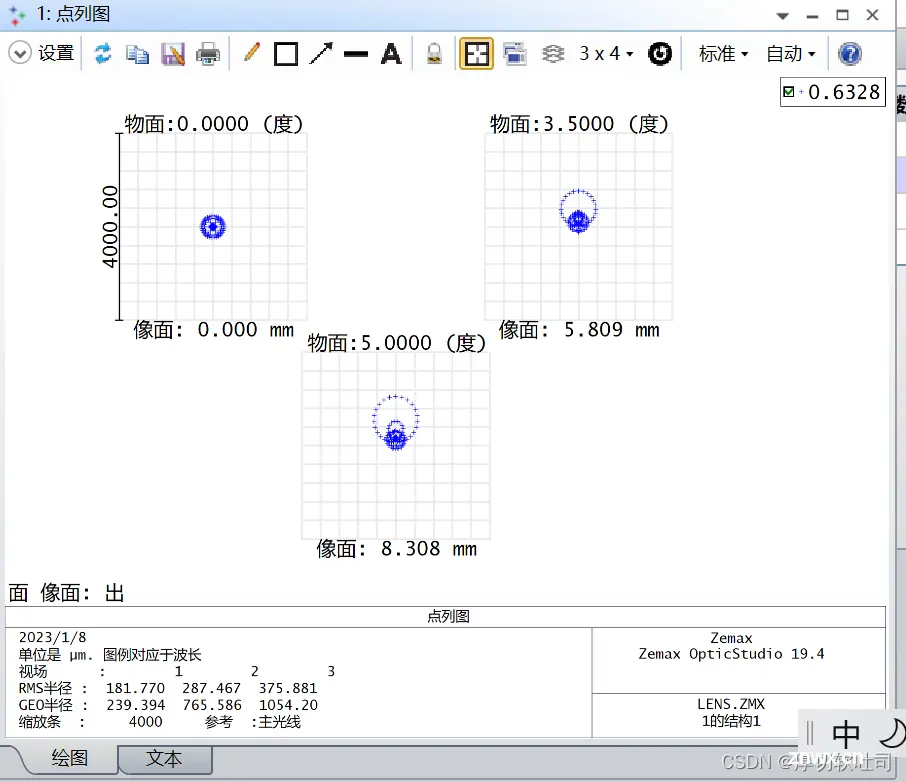
点列图
像质分析功能栏:

光程差图
光线光扇图
快速聚焦工具
快速聚焦可以调整像面前一表面的厚度,使RMS像差最小。
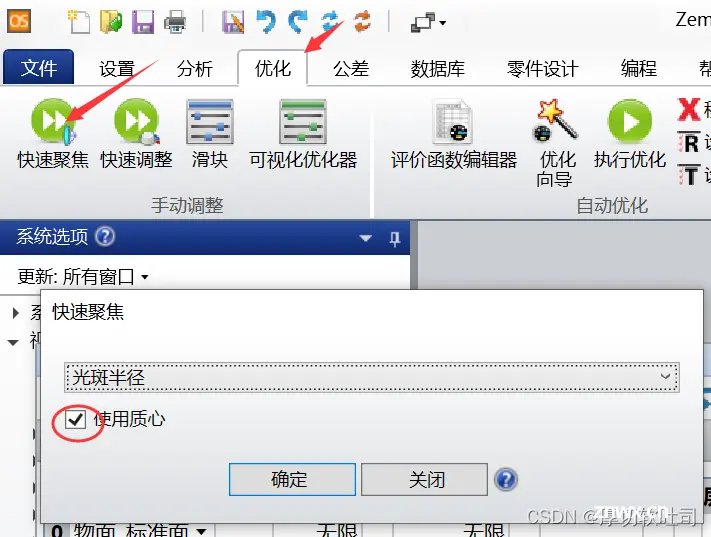
可以发现像面前一个表面厚度发生了改变:
可以发现由于像面位置的改变,最大视场的GEO半径和RMS半径减小了近两倍
补充:
界面最下面状态栏参数含义

EFFL:有效焦距,该值针对于近轴系统,对非近轴系统可能不准确。
WFNO:工作F数。
ENPD:入瞳直径。
TOTR:第一个面到像面距离,不包括物距。
优化
表面2的曲率半径不可以自由调整;透镜的中心厚度(表面1的厚度)、前表面的曲率半径(表面1的曲率半径)、后面透镜与像面的距离(表面2的厚度)都可以作为变量,使单透镜的RMS半径最小化;设置求解
使用“Ctrl + Z”

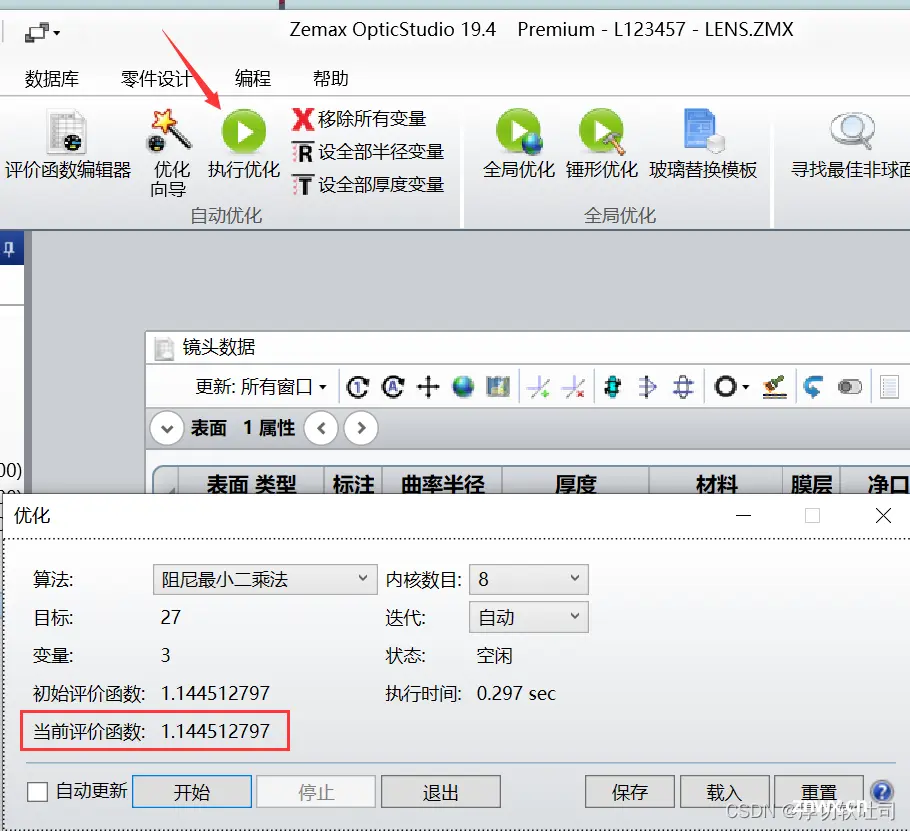
执行优化
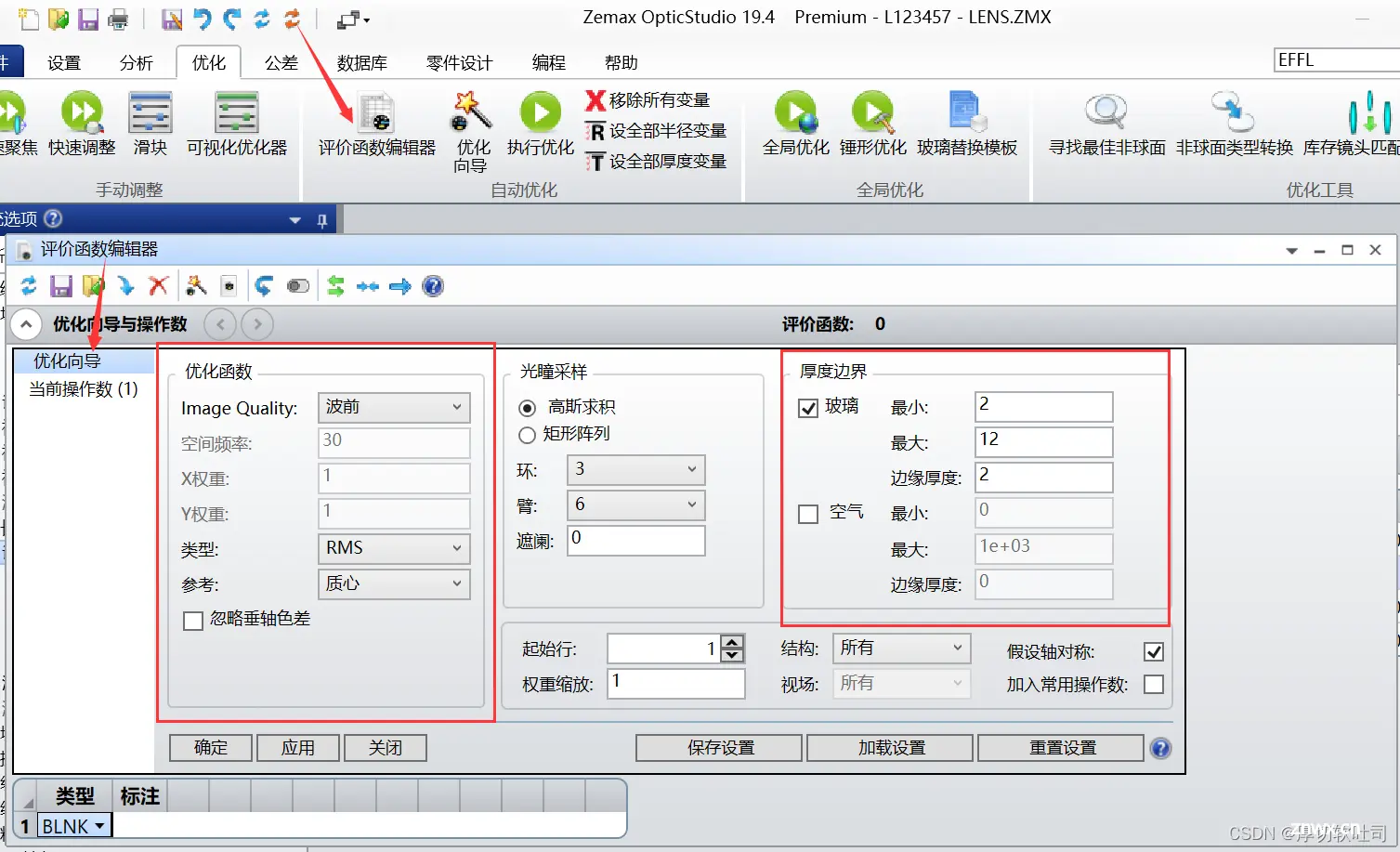
评价函数是光学系统与指定目标的接近程度的数值表示。可以自己构建评价函数,但是让系统构建评价函数更容易。针对相对于质心的RMS半径进行优化,其他参数保留默认值;为防止透镜变得太薄或者太厚,对透镜厚度设置边界约束,在“玻璃”选项将最小、最大和边缘厚度输入,设置如下:
执行优化后,优化操作数已自动插入到评价函数编辑器,每个操作数都有一个特定的目标、权重和当前值,这些值构成评价函数编辑器右上角评价函数的值。
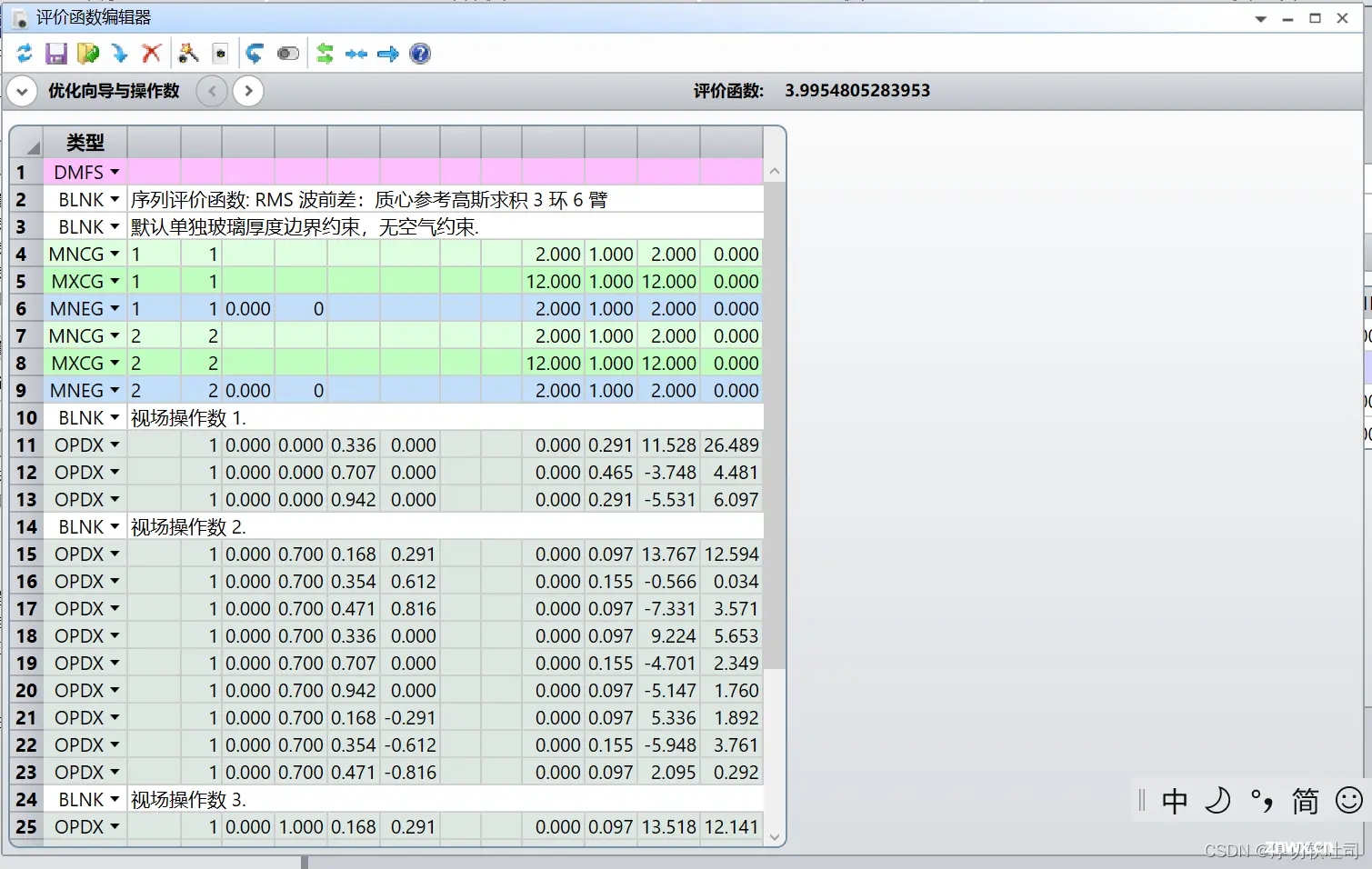
观察初始评价函数值和当前评价函数值
优化后性能
经过优化后,与初始性能相比,RMS半径和GEO半径下降了约8倍。
声明
本文内容仅代表作者观点,或转载于其他网站,本站不以此文作为商业用途
如有涉及侵权,请联系本站进行删除
转载本站原创文章,请注明来源及作者。